






文章目录
1、I2C总线
I2C(Inter-integrated Circuit)总线是由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备,是微电子通信控制领域广泛采用的一种总线标准。它是同步通信的一种特殊形式,具有接口线少、控制方式简单、器件封装形式少、通信速率高等优点。
I2C总线特征
- 两条总线线路:一条串行数据线SDA,一条串行时钟线SCL来完成数据的传输及外围器件的扩展。
- I2C总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址
- I2C总线数据传输速率在标准模式下可达100kbit/s,快速模式下可达400kbit/s,高速模式下可达3.4Mbit/s。一般通过I2C总线接口可编程时钟来实现传输速率的调整,同时也跟所接的上拉电阻的阻值有关。
- I2C总线上的主设备与从设备之间以字节(8位)为单位进行单双工的数据传输。
- I2C总线在物理连接上分别由SDA(串行数据线)和SCL(串行时钟线)及上拉电阻组成。通信原理是通过对SCL和SDA线高低电平的时序来控制的,产生I2C总线协议所需要的信号进行数据的传递。总线空闲状态时,这两根线一般被上面所接的上拉电阻拉高,保持高电平。

1.1 I2C总线协议
- I2C协议规定:总线上数据的传输必须以一个起始信号作为开始条件,以一个结束信号作为传输的停止条件。起始和结束信号总是由主设备产生。总线在空闲状态时,SCL和SDA都保持着高电平。
- 起始信号:当SCL为高电平而SDA由高到低的跳变,表示产生一个起始条件
- 结束信号:当SCL为高电平而SDA由低到高的跳变,表示产生一个停止条件

- 数据传输
数据传输以字节为单位,主设备在SCL线上产生一个时钟脉冲的过程中将在SDA线上传输一个数据位,数据在时钟的高电平被采样,一个字节按数据位从高位到低位的顺序进行传输。
主设备在传输有效数据之前,要先指定从设备的地址,一般位7位,然后再发生数据传输的方向位,0表示主设备向从设备写数据,1表示主设备向从设备读数据。 - 应答信号
接受数据的器件在接收到 8bit 数据侯,向发送数据的器件发出低电平的应答信号,表示已收到数据。这个数据由数据接收方发出。可主设备,也可从设备。

1.2 I2C总线读写操作
- 主设备往从设备写数据

- 主设备读从设备数据

- 主设备读从设备的某个寄存器

1.3 STM32F0-I2C控制器特征
- 软件模拟I2C时序
由于直接控制GPIO引脚电平产生通讯时序时,需要由CPU控制每一个时刻的引脚状态,所以称之为“软件模拟协议”方式。 - 硬件控制产生I2C时序
STM32的I2C片上外设专门负责实现I2C通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理I2C协议的方式减轻了CPU的工作,且使软件设计更加简单。 - I2C的主要特点
1)从机模式和主机模式
2)多主机功能
3)标准模式(高达 100kHz )
4)快速模式(高达 400kHz )
5)超快速模式(高达 1 MHz )
6)7 位和 10 位地址模式
7)软件复位
8)1 字节缓冲带 DMA 功能

2、MPU6050
MPU-6050是全球首例6轴运动处理传感器。它集成了3轴MEMS 陀螺仪,3轴MEMS 加速度计,以及一个可扩展的数字运动处理器DMP,可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后还可以通过其I2C输出一个9轴的信号。MPU-6050也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。

- 三轴加速度测量


注意:加速度测量计反应的加速向量与当前的受力方向是相反的,如上图,受力方向向左,但是加速度的向量方向为右 - 陀螺仪
陀螺仪,是用来测量角速度的,单位为度每秒(deg/s)

一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。Mpu6050有3个陀螺仪,可测X,Y,Z方向的角速度值
MPU6050的特性参数

MPU6050的寄存器介绍
1) POWER MANAGEMENT电源管理寄存器

- SLEEP 该位置 1 , MPU-60X0 进入睡眠模式。
- CLKSEL置 0,可选择使用MPU-60X0 默认的内部8M振荡器作为时钟源
- 典型设置
解除休眠状态:I2C_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00);
2)SAMPLE RATE DIVIDER 采样频率分频器

- 采样频率= 陀螺仪输出频率/ ( 1+SMPLRT_DIV )
- 当 DLPF s is disabled ( 0 DLPF_CFG=0 r or 7 7 7 7) ) ,陀螺输出频率 =8kHz ;
- 典型设置
陀螺仪采样率设置成1KHz: I2C_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07);
3)CONFIGURATION 低通滤波配置寄存器

- 该寄存器配置外部引脚采样,
- 陀螺仪和加速度计的数字低通滤波器
- 典型设置
低通滤波频率,典型值:0x06(带宽5KHz)
I2C_WriteReg(MPU6050_RA_CONFIG , 0x06);
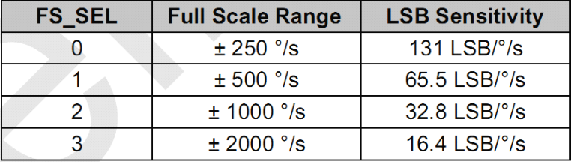
4) GYROSCOPE CONFIGURATION 陀螺仪配置寄存器
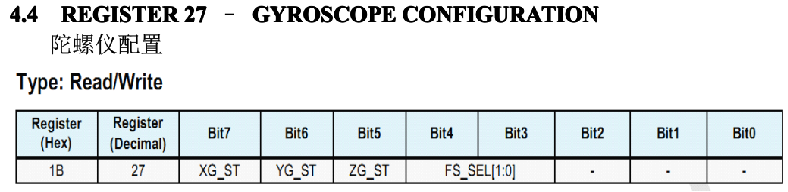
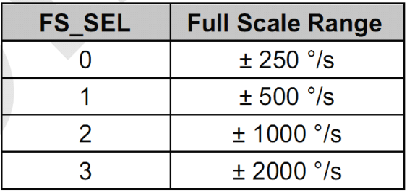
- 该寄存器是用来触发陀螺仪自检和配置陀螺仪的满量程范围。
- 典型设置
陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
I2C_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18);
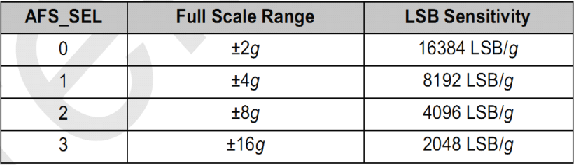
5)ACCELEROMETER CONFIGURATION 加速度配置寄存器
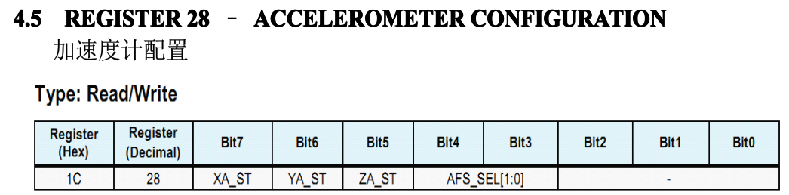
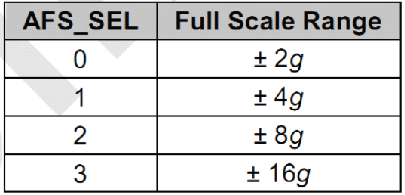
- 该寄存器是用来触发加速度计自检和配置加速度计的满量程范围。
- 典型设置
配置加速度传感器工作在 2G 模式,不自检
I2C_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x00);
6)读取X, Y, Z 三轴加速度的值

7)读取X, Y, Z 三轴陀螺仪的值

8)读取温度值

摄氏度的温度可以用寄存器的置这么计算:
Temperature n in s degrees C = (TEMP_OUT Register e Value as a signed quantity)/340 + 36.53
MPU6050的设备地址

MPU6050电气原理图


注:R4未接,AD0直接接到电源上,因此设备地址为110 1001既0x69















 2727
2727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









