







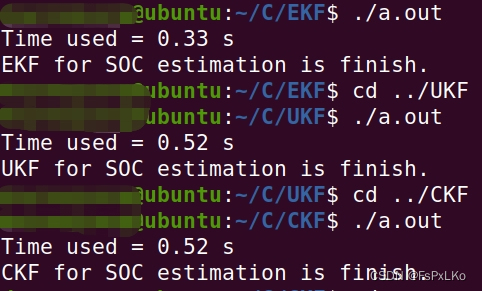
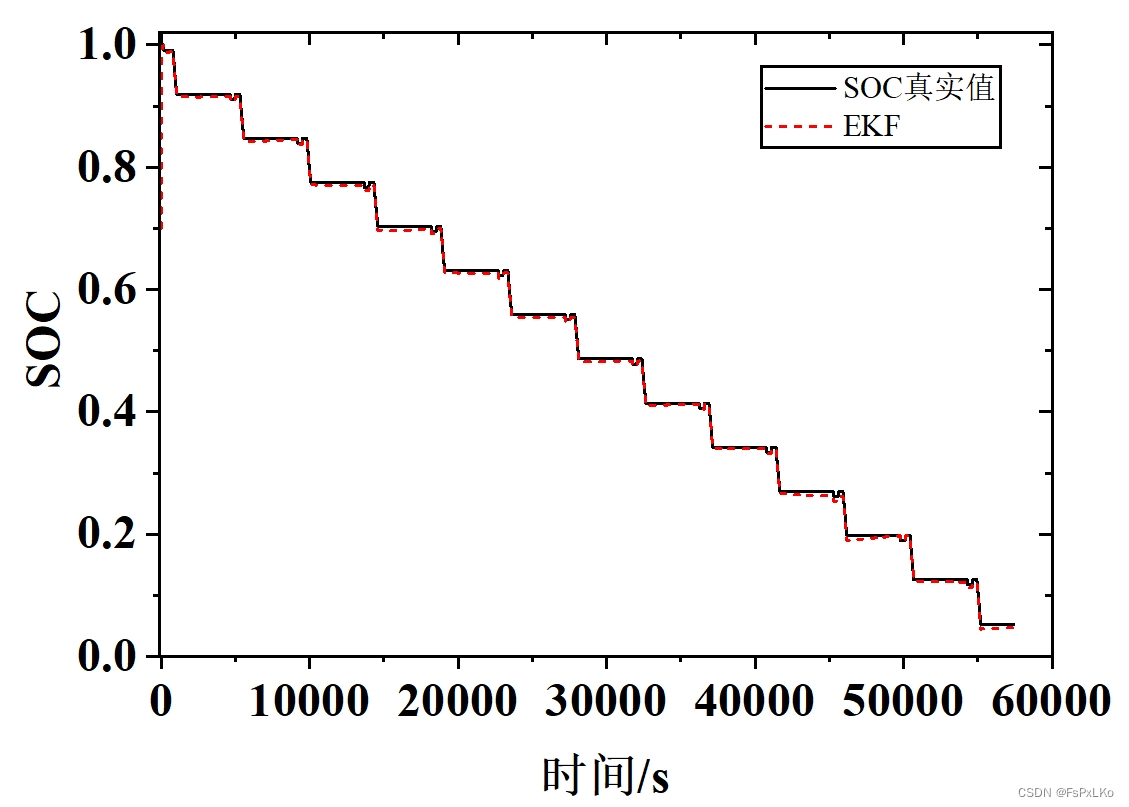
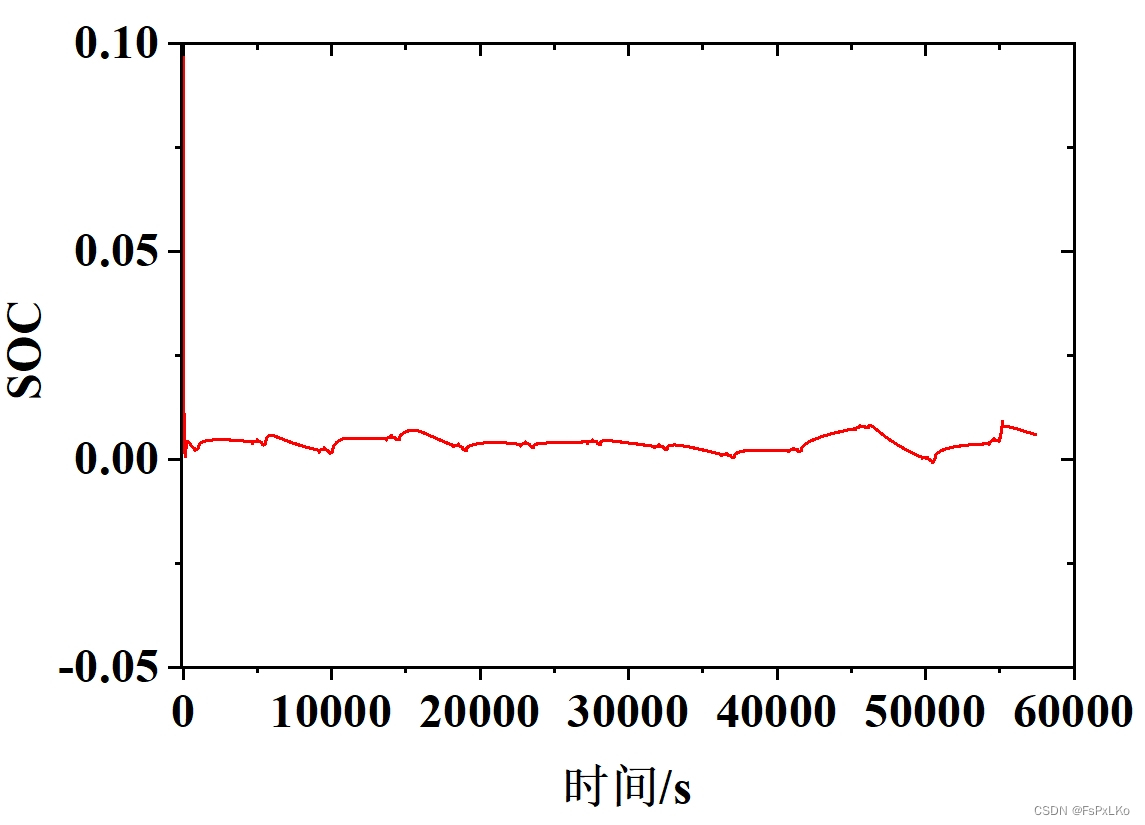
(C语言版)扩展卡尔曼滤波EKF进行锂电池SOC估计的C语言版本实现,和matlab版本一样包含定参和FFRLS两种情况,已在VS2019和Ubuntu 20.04.4版本中运行成功,根据输出文件数据在origin中绘图如图2,3所示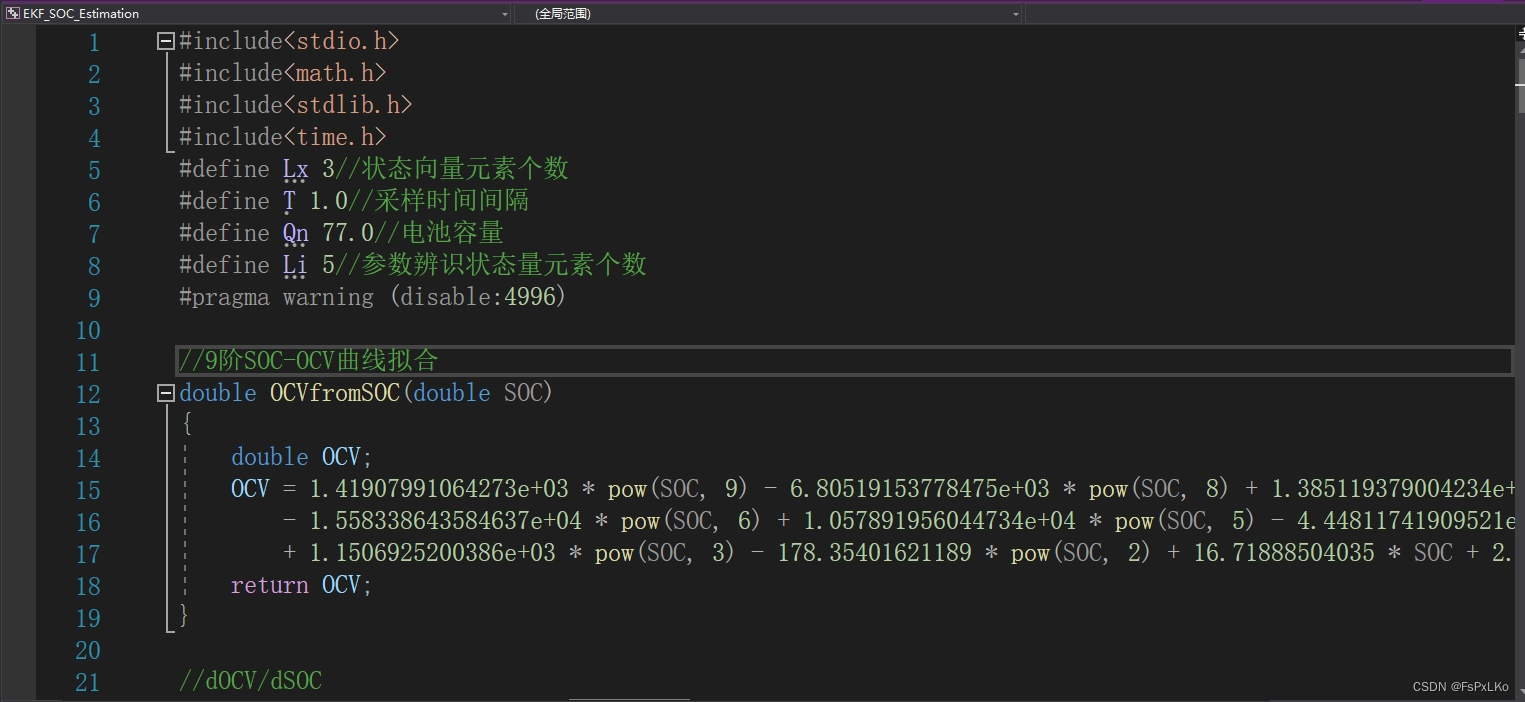
扩展卡尔曼滤波(EKF)是一种常用的非线性滤波算法,它能够对非线性系统进行有效的估计。在电池管理系统中,对锂电池的状态进行准确估计是非常重要的。而电池的SOC(电池剩余容量)是评估电池状态的重要指标之一,因此对SOC的估计具有重要意义。本文将介绍如何使用C语言实现扩展卡尔曼滤波(EKF)进行锂电池SOC估计,并且在VS2019和Ubuntu 20.04.4版本中运行成功。
首先,我们需要了解EKF的原理。扩展卡尔曼滤波是对卡尔曼滤波进行扩展,可以应用于非线性系统的状态估计。其基本思想是通过泰勒级数展开来线性化非线性方程,然后使用卡尔曼滤波进行线性状态估计。在电池SOC估计中,我们可以使用嵌套式的EKF进行非线性状态估
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 519
519











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









