






对激光雷达的“热捧”,在过去几年时间已经推动了两轮行业的投资浪潮,也引发不同技术路线的相互较量。
第一次是为了加快自动驾驶原型车的测试验证,受益的主要是高线束机械式激光雷达;第二次,是为了满足高阶自动驾驶的激光雷达前装上车,主要是围绕可以快速满足车规级要求的混合固态及纯固态技术路线。
如今,用于中短距离探测需求的激光雷达,已经开始成为前装量产车的主流配置。目的是弥补其他感知技术在复杂城区以及高速公路的高阶自动驾驶落地需求。
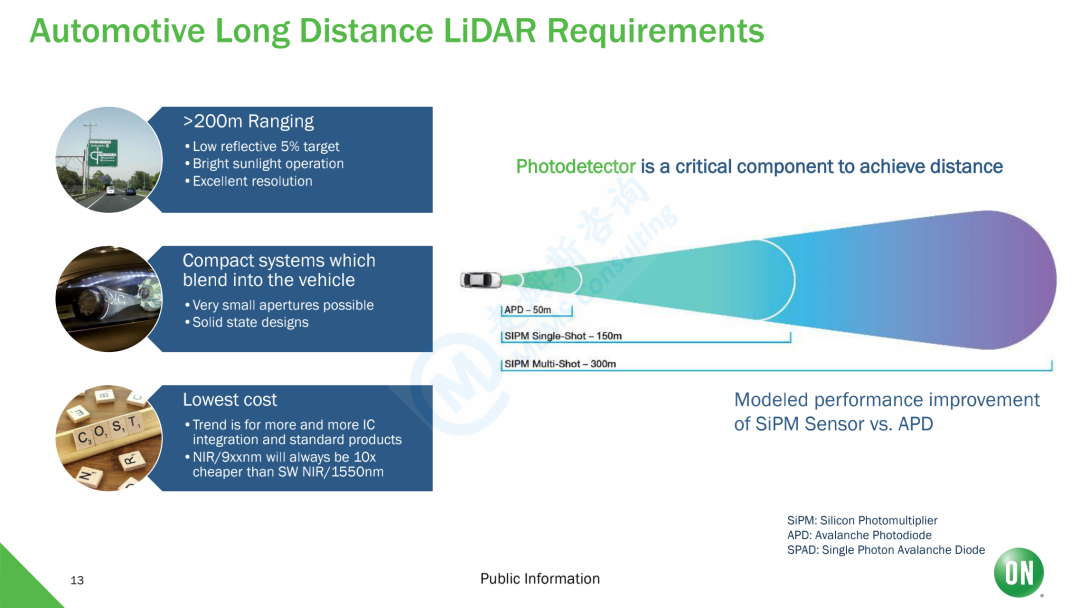
不过,对于激光雷达来说,还需要解决几个技术瓶颈:第一是测距范围,能否跨过250米的临界点,面向300-400米的长距离探测,从而与摄像头、毫米波雷达形成更高的数据融合效果;
第二是解决对黑色物体的有效探测(以及物体反射率较低情况下的识别灵敏度),并进一步提升对更多道路上非常见障碍物的精度识别。
在福特与大众投资的自动驾驶公司Argo AI联合创始人Bryan Salesky看来,传感器仍然是大规模部署自动驾驶汽车的最大障碍之一,特别是激光雷达的价格以及与其他感知部件的更好融合。
“我们一直在探索如何提高激光雷达的距离、分辨率和视角,但我们也在寻求降低成本,并大规模生产这些传感器。”Bryan Salesky表示,对于自动驾驶公司来说,激光雷达绝对是核心竞争力之一。
一、激光雷达,不断试错
时间回到2016年8月,福特宣布投资Velodyne,这是全球最早一批投资激光雷达公司的汽车制造商;一年后,福特旗下自动驾驶子公司Argo AI收购一家名为Princeton Lightwave的激光雷达初创公司。
而作为Argo AI的联合创始人,Salesky也曾在谷歌参与激光雷达的研发,“自动驾驶能力一直以来都是受到传感器性能的限制。”
Princeton Lightwave成立于2000年,从Sarnoff公司分离出来,致力于将高功率二极管激光器商业化,早期主要用于电信行业。在互联网泡沫破裂后,该公司于2003年转向检测和成像应用,瞄准商业航空测绘和国防应用。
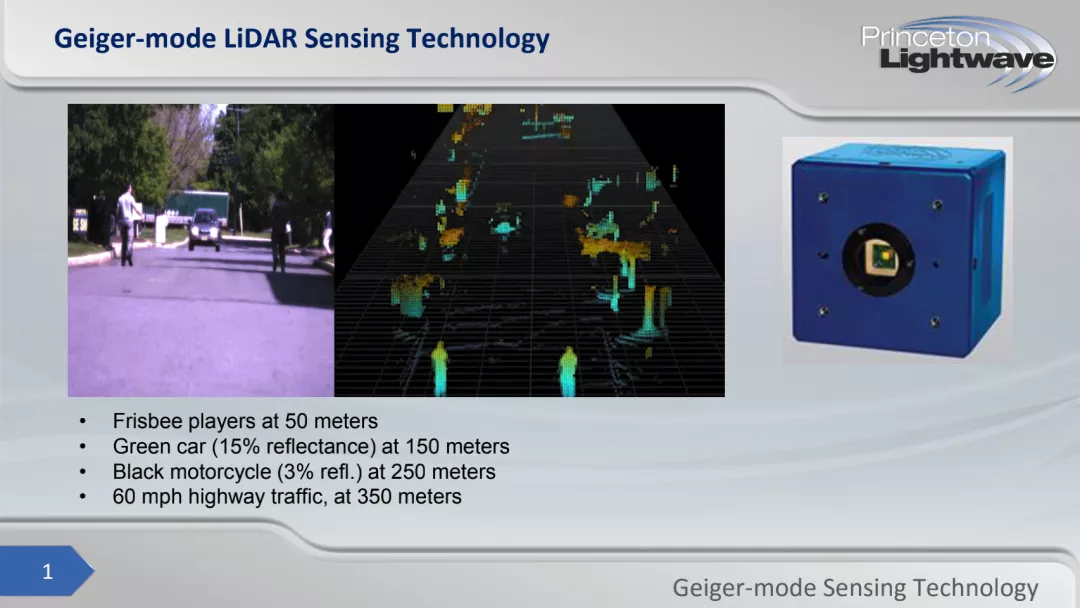

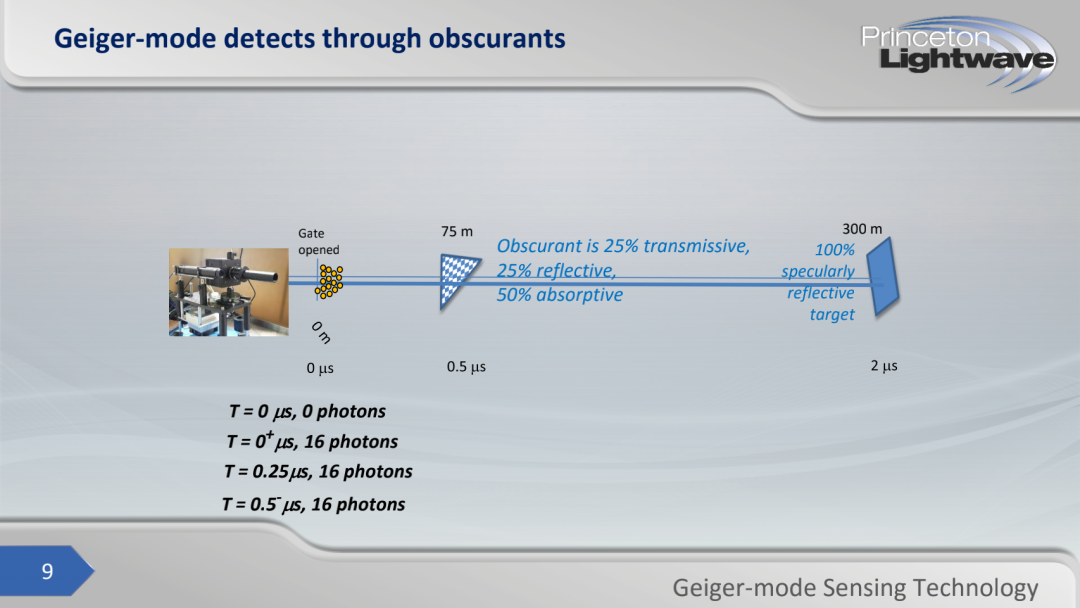
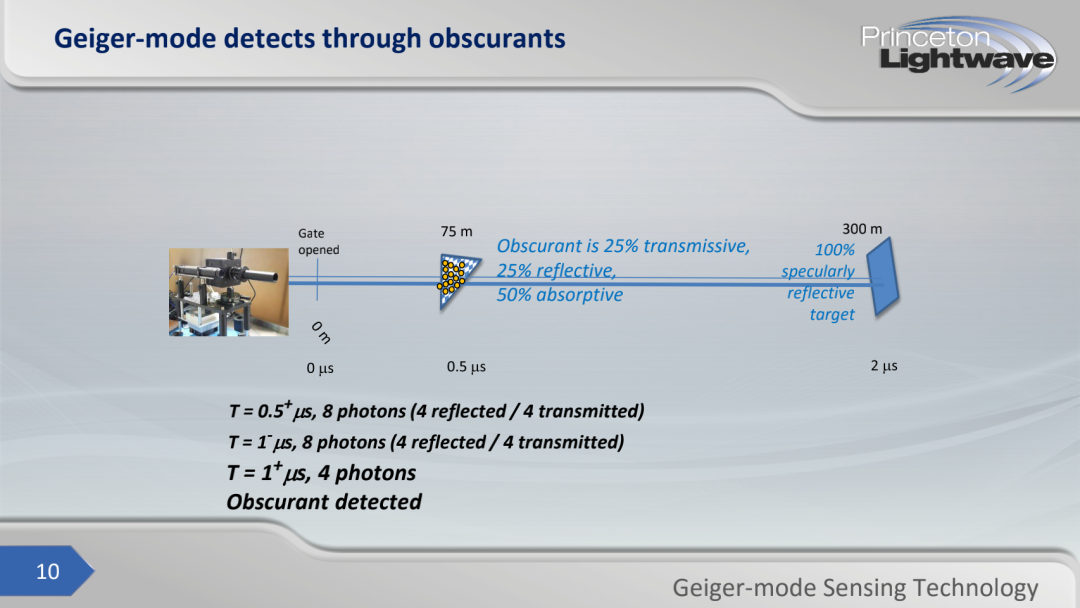
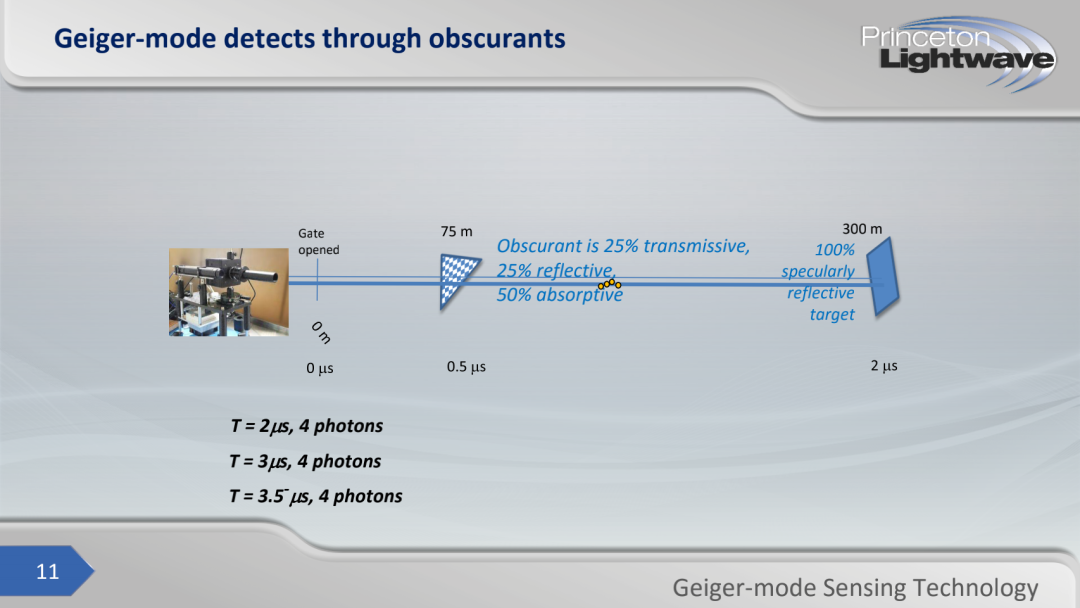
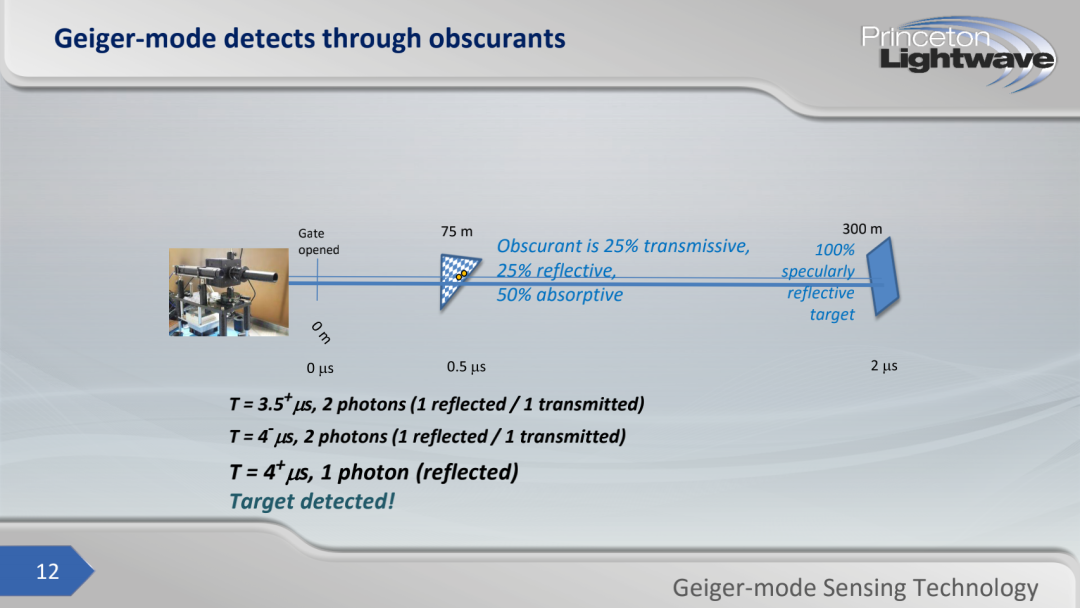
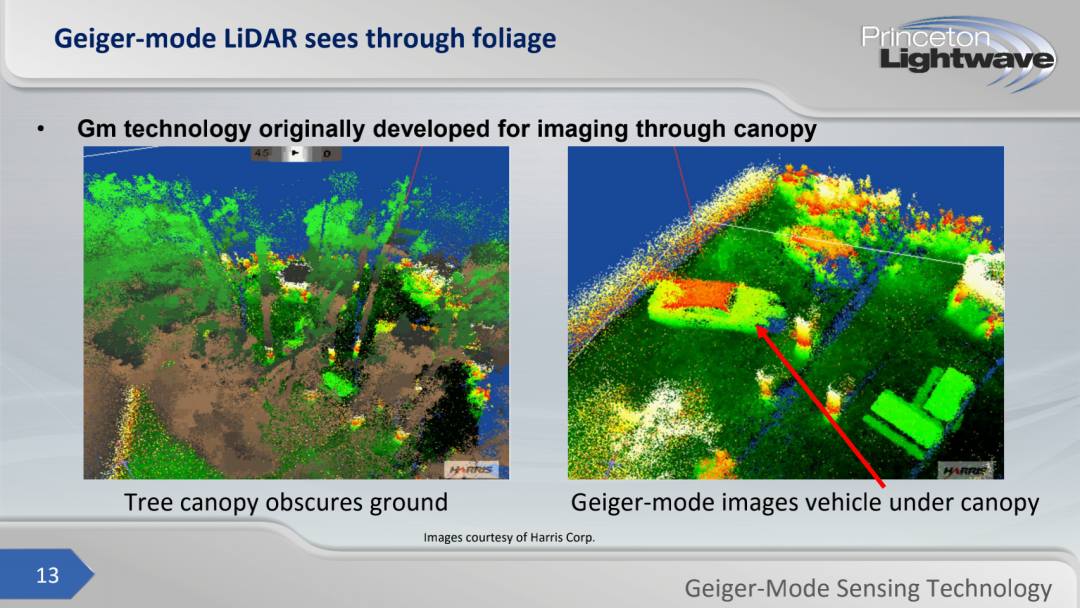
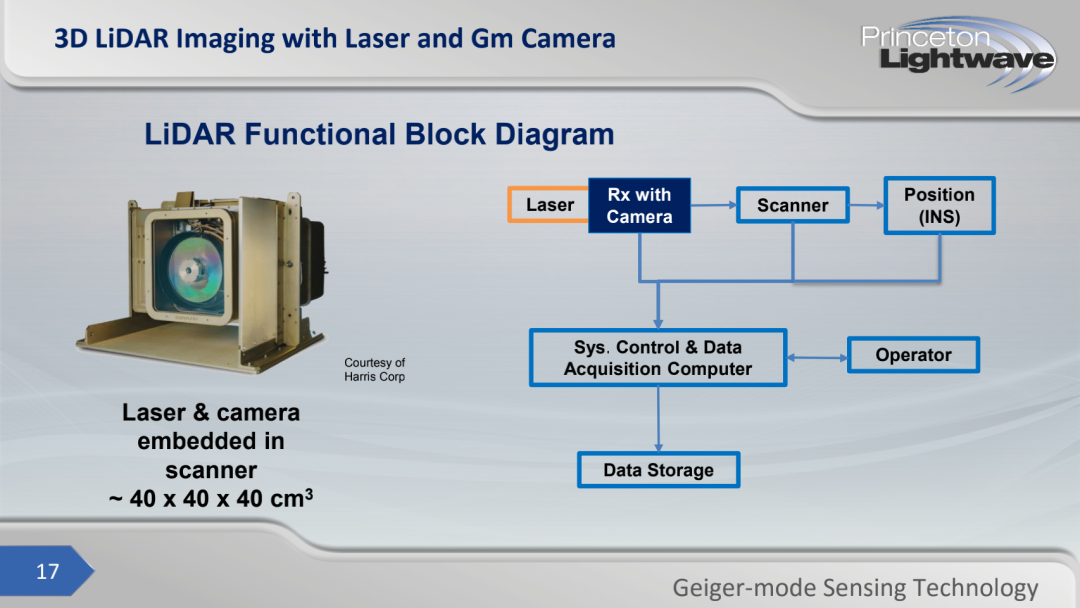
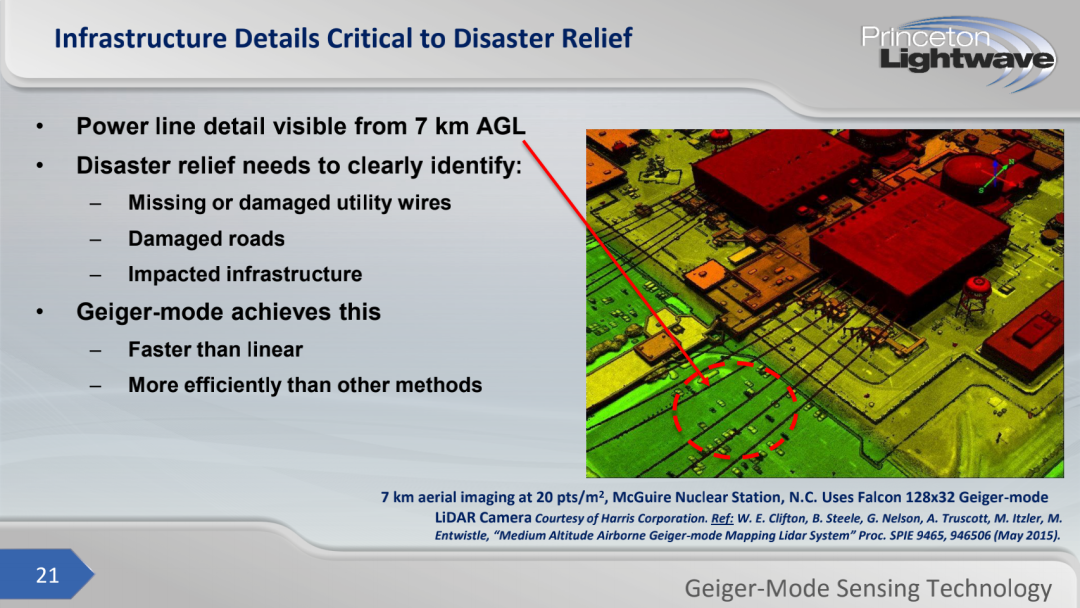
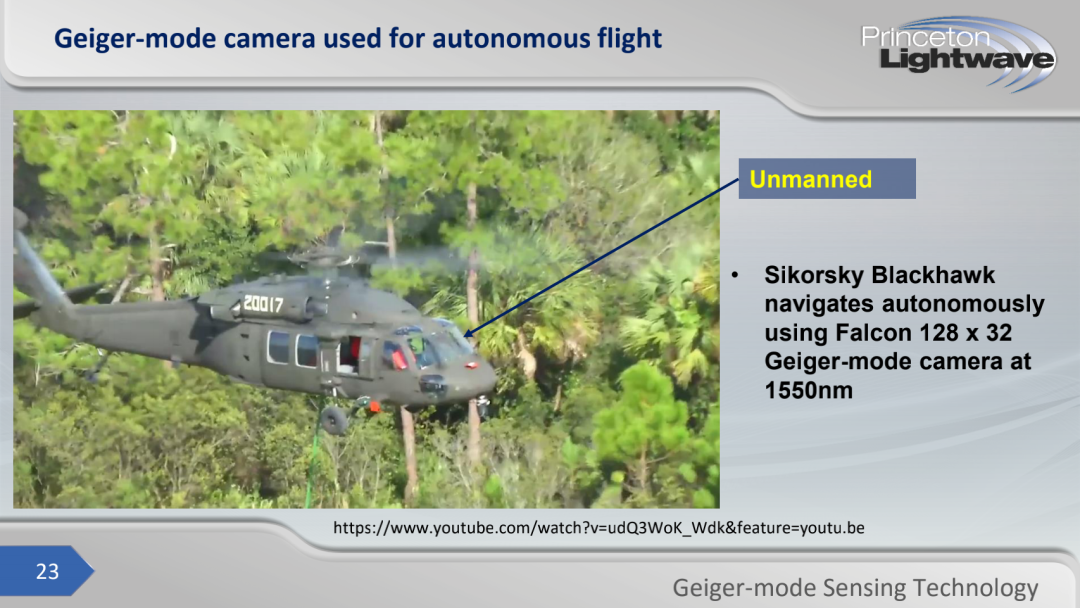
和其他市面上的其他激光雷达公司采取的技术路线不同的是,Princeton Lightwave采用了一种被称为盖革模式(Geiger-mode)雪崩光电二极管(APD)的组件,与同行大部分采用的线性模式APD不同,这种传感器可以大幅提高检测灵敏度。
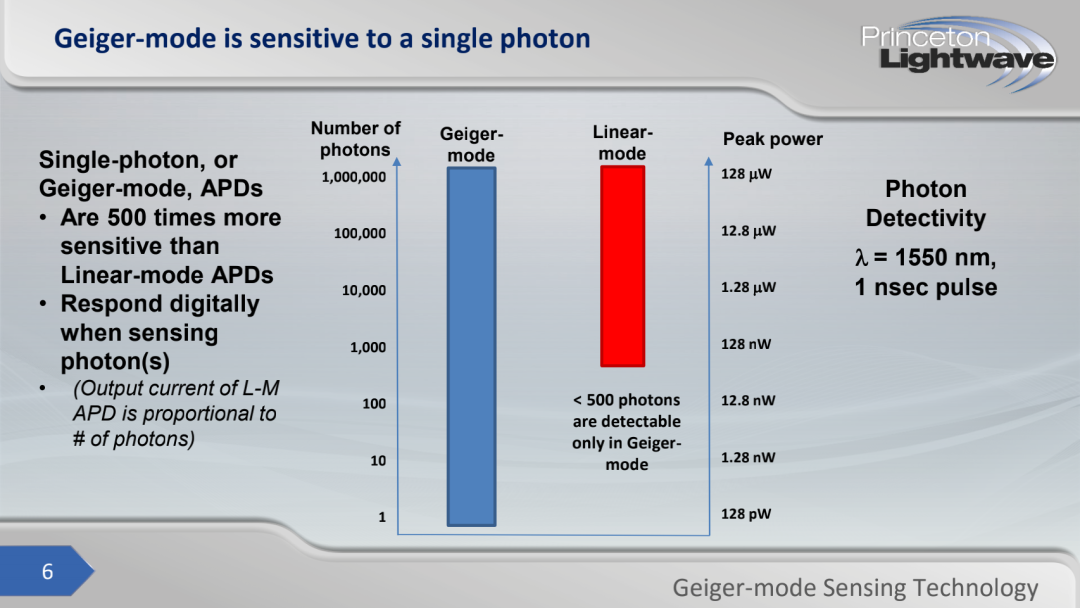
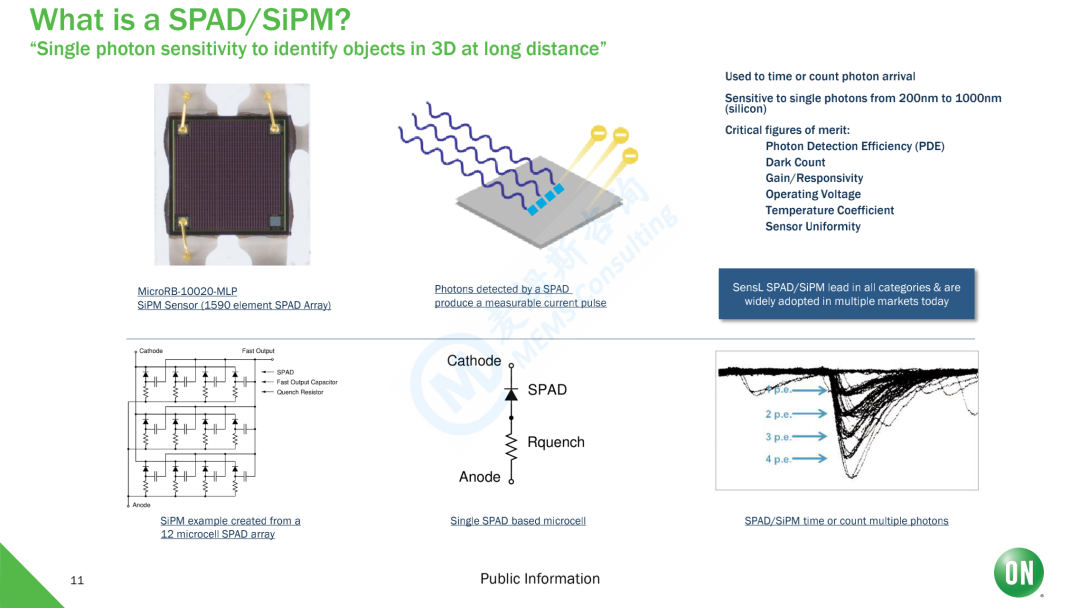
众所周知,APD工作模式分盖革模式和线型模式,区别在于线型模式偏置电压低于反向击穿电压,盖格模式偏置电压高于击穿电压。而盖格模式通常适用于单光子计数应用,响应速度快,信噪比高。
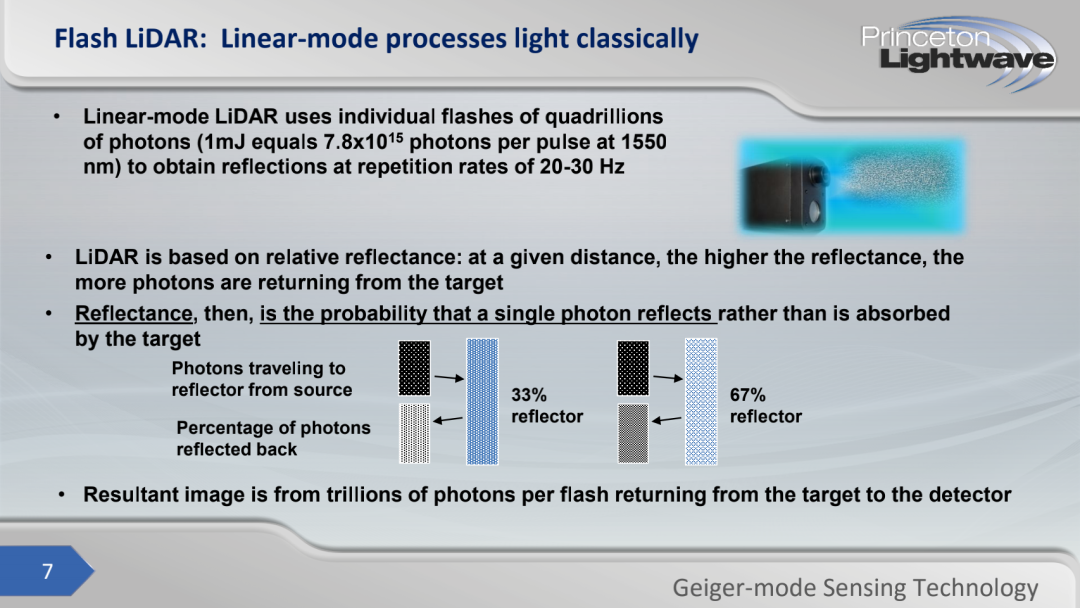
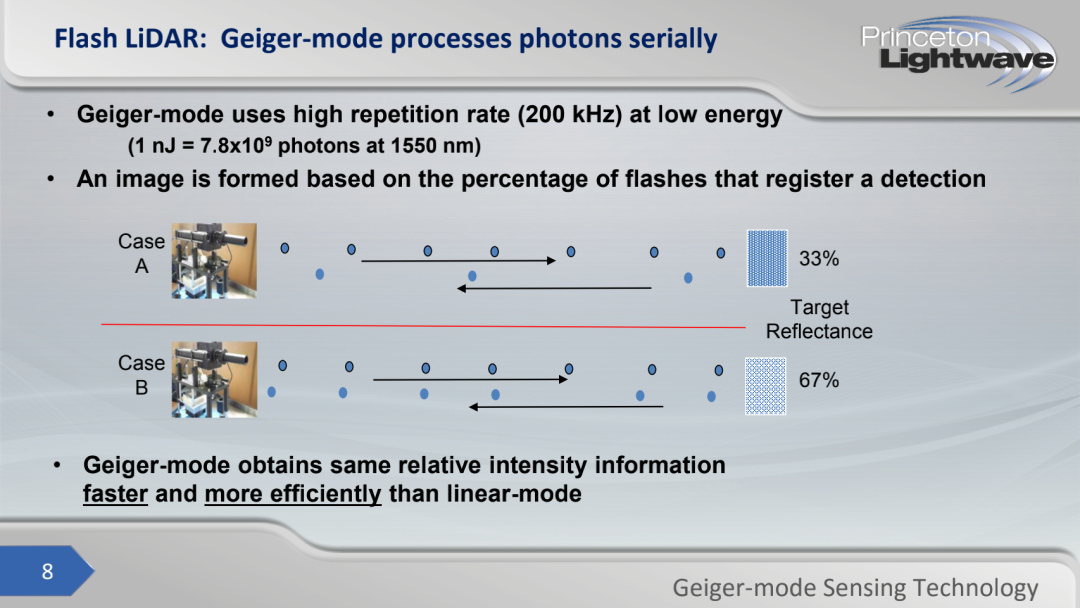
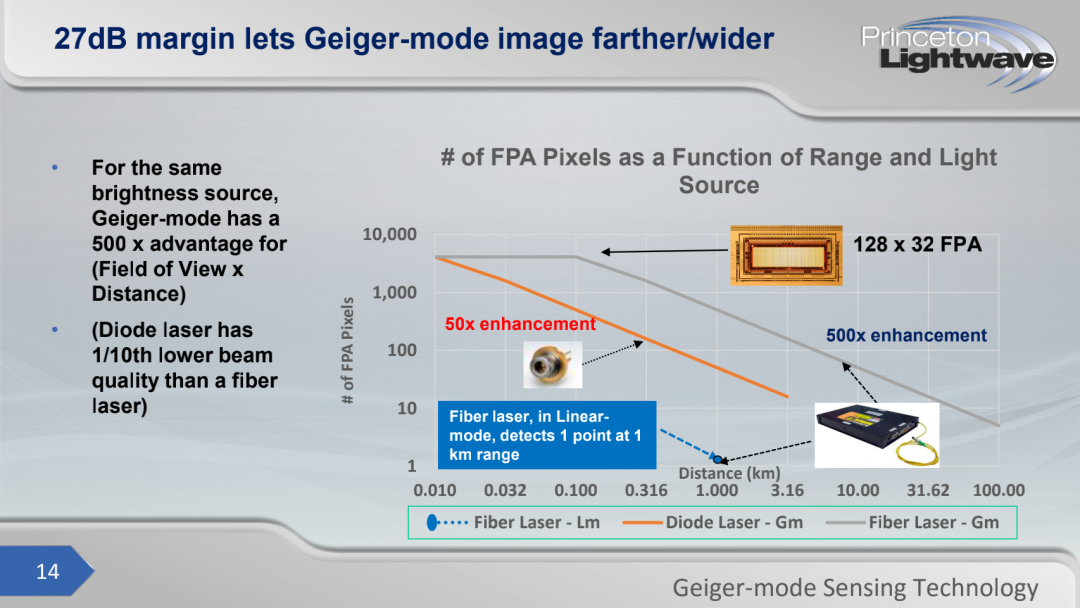
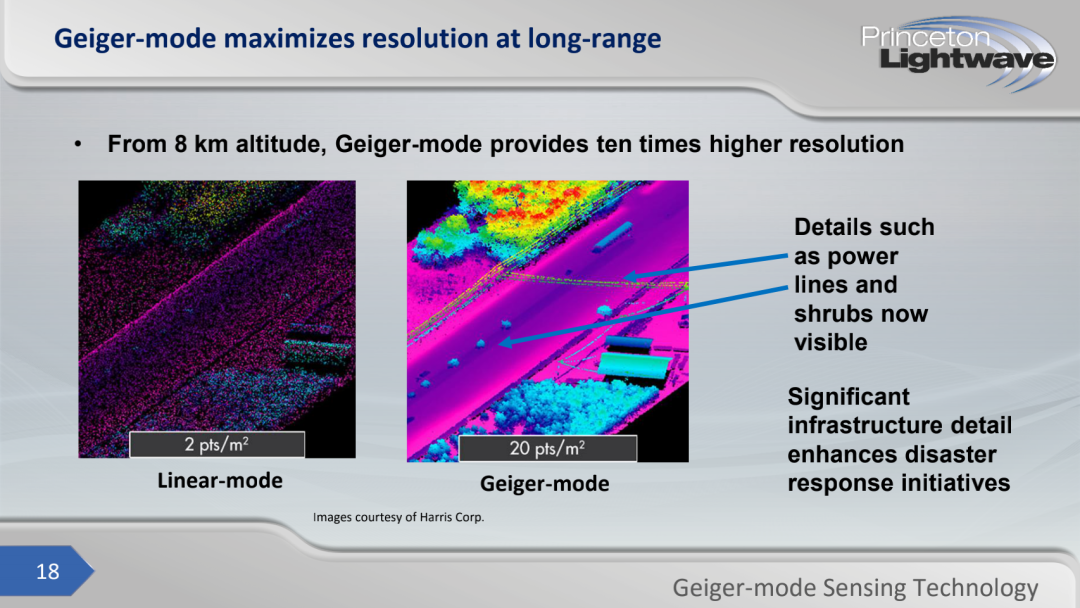
数据显示,线性模式APD需要接收大约500到1000个光子才能形成激光雷达点云中的一个点。而盖革模式的灵敏度足以探测到单个光子。
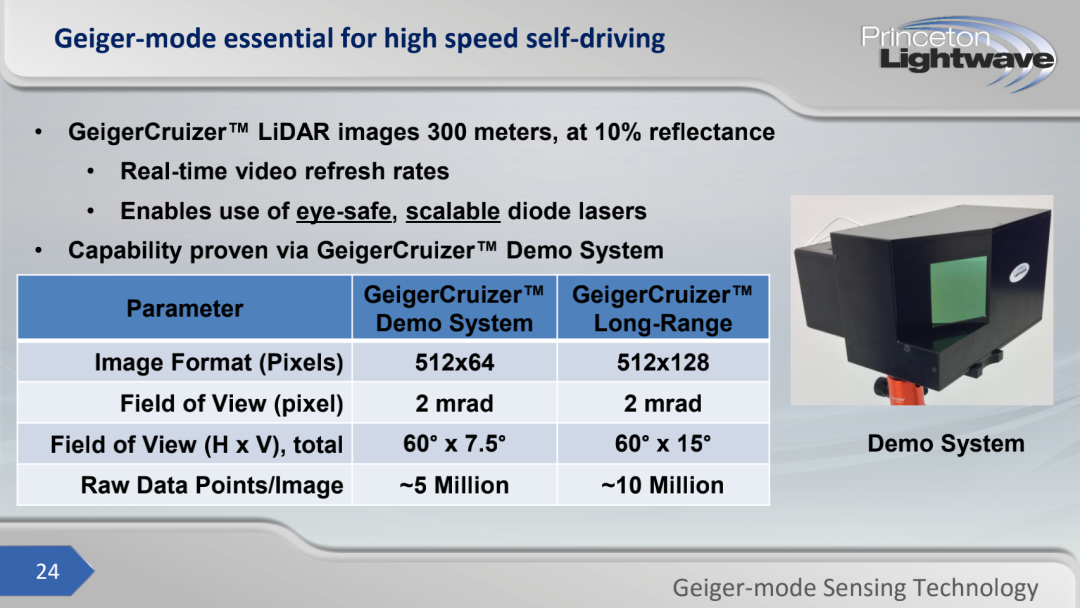
此外,不需要高能光脉冲,盖革模式传感器允许重复频率更低的能量脉冲,即使采用低功率激光发射器也可以实现更长的探测距离,至少在250米以上。而同期其他产品的探测距离,大多数是在50至80米左右。
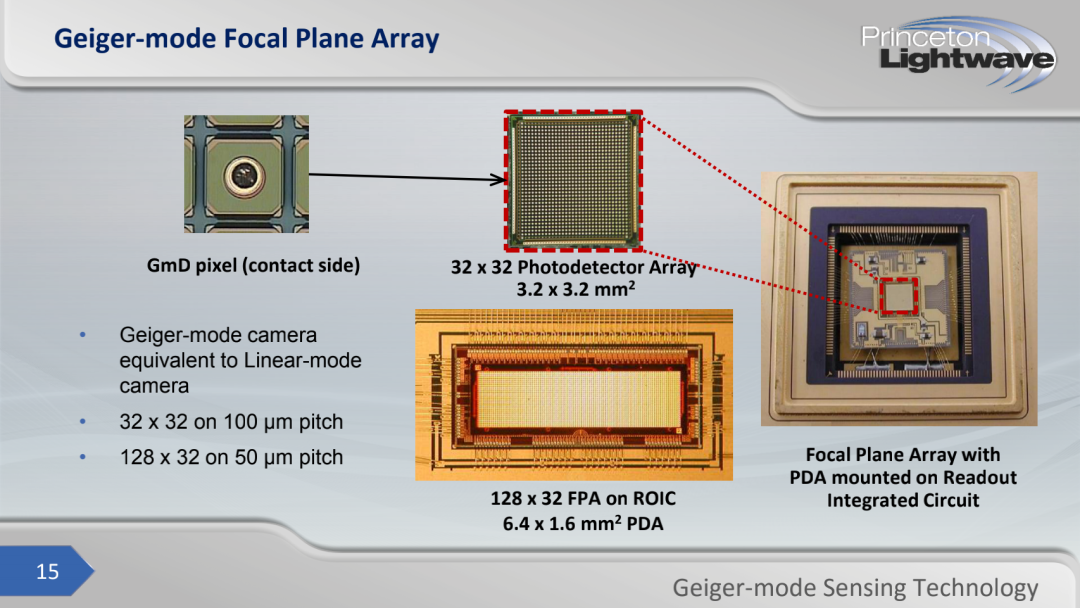
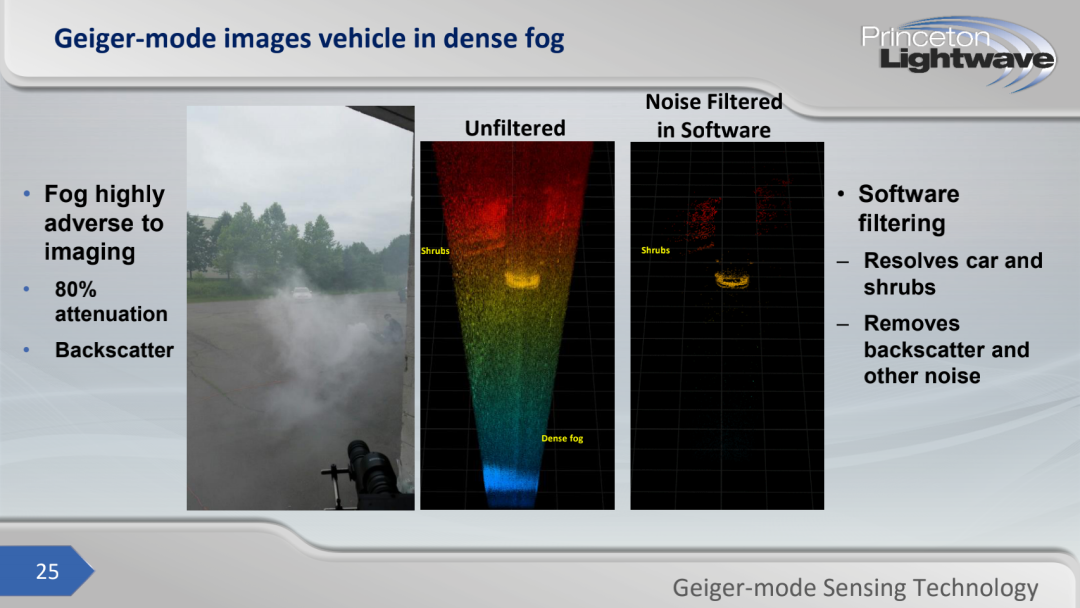
更关键的是,探测单个光子的能力允许盖革模式APD通过阵列组合,以获得车辆周围环境的更高分辨率,并且提高车辆在高速行驶状态下,传感器的探测性能。同时,更高频率的脉冲也有助于更好地克服雨、雪、强光等环境。
比如,在60英里每小时的速度下,一辆汽车每秒可以行驶约27米,越早发现和跟踪物体或行人,车辆就能越早做出路径规划和控制决策。而在城市环境中,要追踪的潜在目标数量则需要非常高的分辨率。
不过,任何新技术的突破,都需要很长时间的验证测试。
比如,盖革模式APD(也就是通常所说的SPAD)在每一个光子探测的区间内有一段失效时间,如果采取被动淬火方式,会导致超过200ns以上的dead time;而采用主动淬火,可以缩短至50ns以内。
直到去年,福特宣布套现Velodyne公司的所持股份,这意味着,福特汽车以及Argo已经明确了自主研发激光雷达的战略部署,也代表着Princeton Lightwave的产品方案进入真正的商业化落地阶段。
“在短期内,Velodyne对福特/Argo来说至关重要,因为我们需要他们的传感器用于测试和早期验证开发,从长远来看,我们需要建立自己的量产能力。”福特公司相关负责人表示。
Argo AI公司相关负责人表示,几年前投资两家激光雷达,是因为还不清楚何种技术路线可以最终胜出。如今,自主研发的激光雷达将很快亮相搭载,并将于2025年前后在大众集团的车型上亮相。
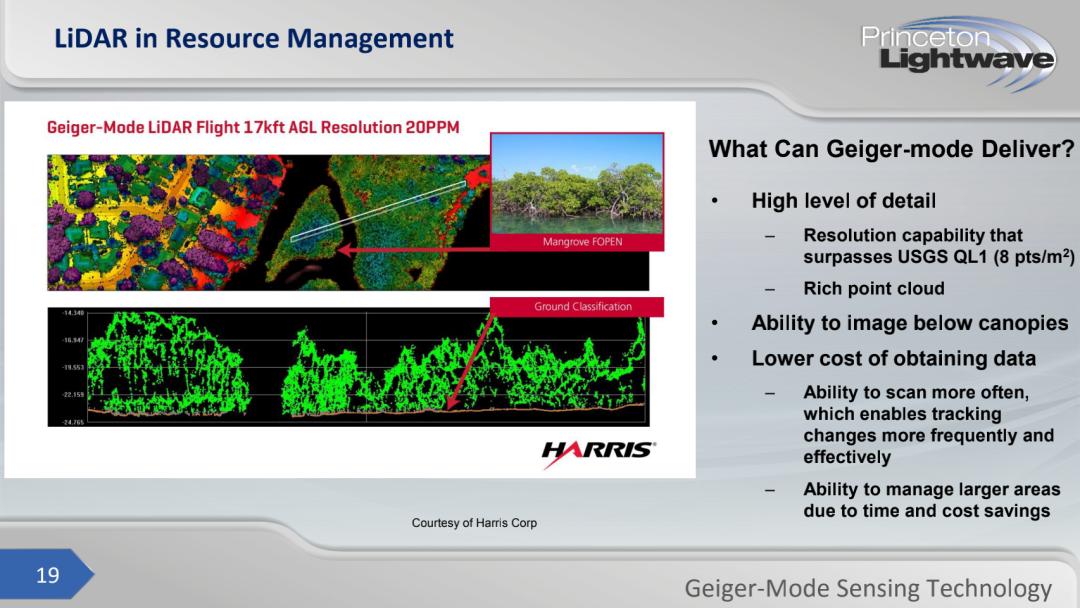
按照目前披露的数据,Princeton Lightwave的量产方案可以实现400米的测距,具备黑色物体的敏感度(反射率低于1%,同时,分辨率接近摄像头),并满足更多天气条件下在城区复杂路况以及高速公司自动驾驶的性能要求。
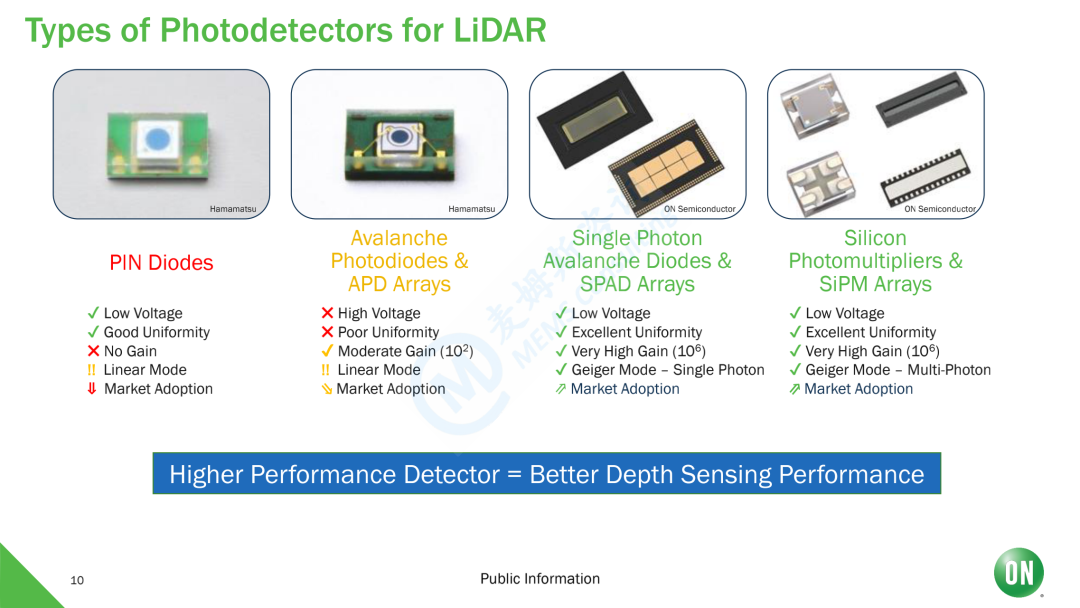
SPAD的优势,还来自于供应链的技术成熟度提升。
比如,苹果公司推出的消费级激光雷达,采用的就是Lumentum提供的垂直腔面发射激光器(VCSEL)和索尼公司的SPAD组件。
索尼此前发布的首款基于SPAD的dToF汽车远程激光雷达方案,也首次利用CMOS图像传感器开发的堆叠结构、铜-铜连接、MEMS(905nm波长)等技术,在上下两层芯片上实现了SPAD时序和测距处理电路架构。
一些行业人士表示,低成本的固态激光雷达解决方案对于自动驾驶来说至关重要。CMOS集成SPAD阵列也被视为最有希望的低成本解决方案之一。
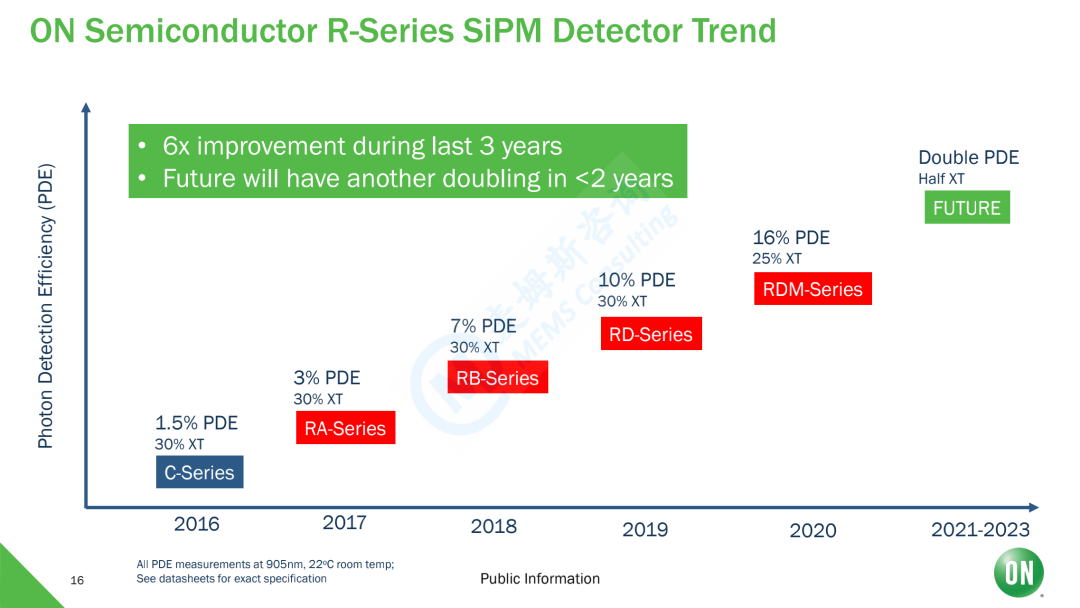
此前,在全球已经有数家激光雷达公司采用了安森美公司研发的基于SPAD的硅光电倍增管(SiPM)技术,产业链相关供应商也在逐步进入产能扩张阶段。
目前,选择安森美方案的公司包括MicroVision、RoboSense(速腾聚创)、Blickfeld等多家激光雷达公司。
二、激光雷达规模上车,还处于早期
事实上,Princeton Lightwave的案例,也凸显当下激光雷达行业的困局之一:即便全球已经有数十家激光雷达公司在挑战规模化量产,但对于下游客户(车企、自动驾驶公司)来说,还没有一种方案可以适配全场景需求以及一些场景的特殊要求。
同时,围绕激光雷达的核心组件,从芯片到激光发射器、探测器、数据处理以及后续的测试验证等等环节,都还处于早期阶段。
在安森美公司看来,目前全球激光雷达方案种类众多,涉及几十家不同的上游供应商和完全不同的体系架构。对于下游客户来说,仍处于为量产方案寻找最佳系统的初期阶段。
以目前全球市值最高的激光雷达上市公司Luminar为例,该公司最新股价已经从最高峰的每股41.8美元下滑至21.85美元,接近腰斩。其他几家上市的同行股价也几乎下滑了接近两位数。
这直接影响到了后续寻求上市的激光雷达公司的定价。比如,AEye公司近日宣布将SPAC上市前估值从20亿美元降至15.2亿美元。除了考虑到目前的市场泡沫风险,更重要的是,目前为止还没有一种技术可以满足汽车制造商的所有需求。
一方面,Luminar还在不断拿到更多客户的订单,数据显示截至去年年底,该公司已经拿到的合同订单额达到13亿美元(但存在交付的不确定性)。
另一方面,该公司的一些客户正在投入自主研发激光雷达的行业。
典型的案例,就是Luminar与Mobileye的合作。就在前者宣布为Mobileye提供测试车用激光雷达的利好消息不久后,Mobileye就宣布将于基于母公司英特尔的技术,自研全新一代激光雷达方案。
此外,Mobileye还明确表示,传感器业务是自动驾驶领域的另一个有利可图的机会。该公司估计,到2030年,车规级激光雷达的市场规模将超过120亿美元。
背后,则是技术路线的竞争。
公开信息显示,Mobileye的自研方案采用的是FMCW路线,这不同于Luminar的脉冲激光雷达,可以依靠英特尔的硅光电子制造经验,可以实现低成本规模量产。
相应的,作为激光雷达公司,也在寻求业务范围的延伸。比如,Luminar宣布计划通过合作伙伴关系扩大业务范围,提供端到端自动驾驶解决方案。
去年7月,另一家激光雷达公司LeddarTech则宣布收购传感器融合和感知软件公司VayaVision,希望加快传感器融合开发并帮助客户加快车型上市时间,并解决系统性成本的行业痛点。
此外,大部分激光雷达公司也在瞄准L2、L3级规模化量产市场。“事实上,4级和5级的问题真的很难。而L2、L3市场,是实现规模化的最快方式,而这恰恰是激光雷达降成本的关键。”
在亮道智能CEO剧学铭看来,激光雷达针对各类应用场景的功能开发、测试验证的需求已经快速凸显出来,汽车行业急需引入智能传感器软件算法开发,高质量数据采集和高效处理等技术,来应对智能化变革。
比如,支持客户完成量产前激光雷达性能定义、产品硬件选型,感知算法开发与测试验证,以及系统集成到整车的完整过程。而大多数激光雷达公司的重心仍在提升方案的可靠性、车规级验证以及性能参数的改进等工作上。
鉴于目前全球范围内的激光雷达无论是从技术、车规级产品以及配套资源各方面真正成熟资源依旧相对稀缺,如何在有限的时间内配齐量产资源实现量产依旧是摆在面前的难题。
四年前,亮道智能通过从激光雷达量产上车必须的感知测试验证领域切入,以固态激光雷达测试验证服务商身份进入长城汽车L3自动驾驶量产项目。
在这个过程中,其还与多家激光雷达硬件公司合作,开发量产级的感知算法,在激光雷达量产项目中形成了软件“开发+测试验证”闭环,在服务多个项目的过程中,积累了丰富的量产经验。
在剧学铭看来,这类整体解决方案的意义在于,帮助车企解决激光雷达量产的实操问题,大大降低了车型量产项目中激光雷达上车的难度,以实现激光雷达产品在最经济有效的综合成本下量产上车。
















 679
679











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









