






陀螺仪传感器MPU6050模块AD设计原理图PCB[2层]文件

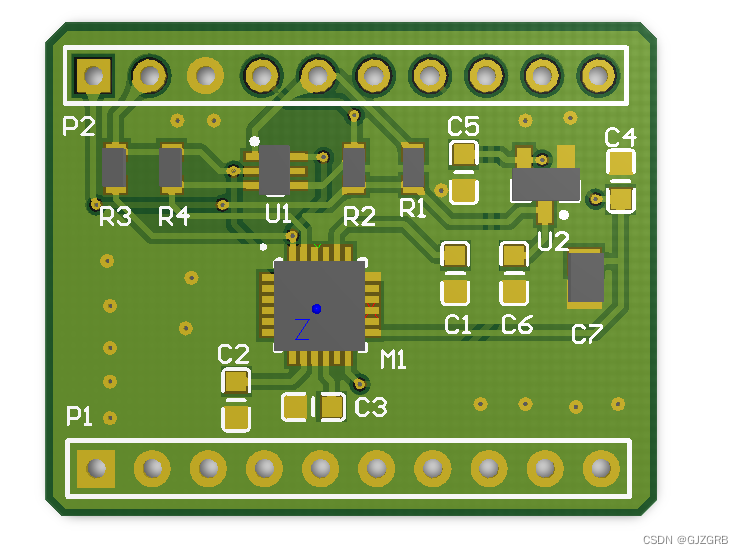
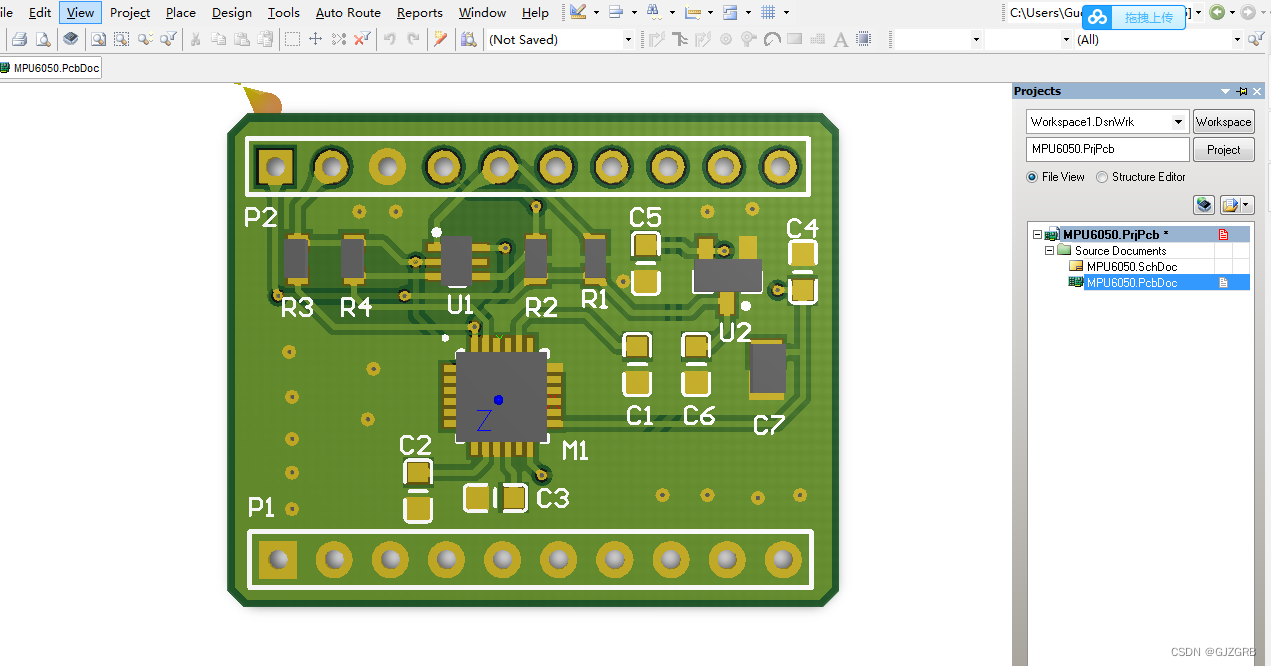
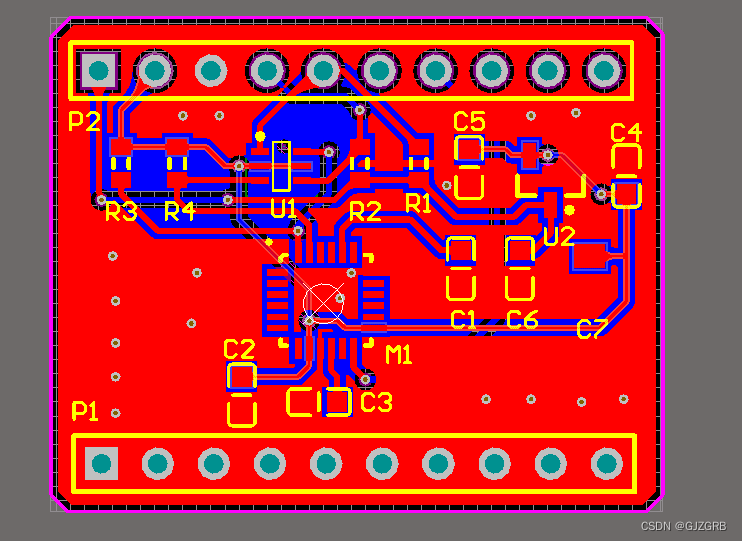
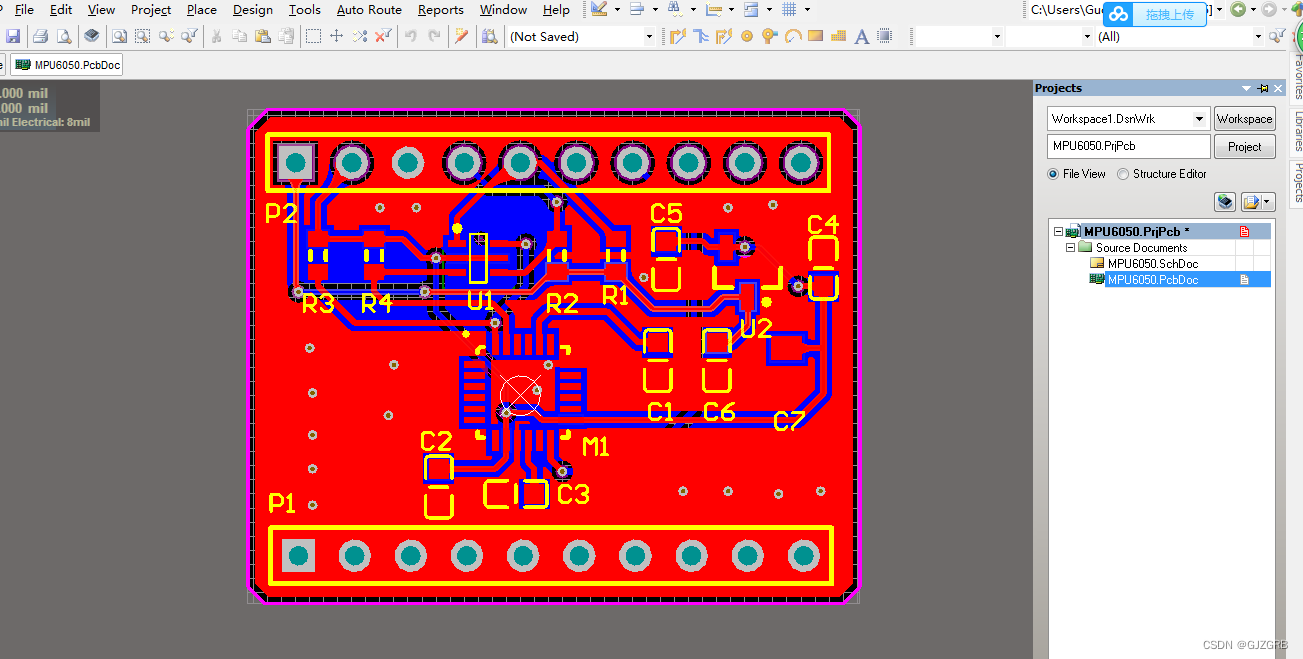
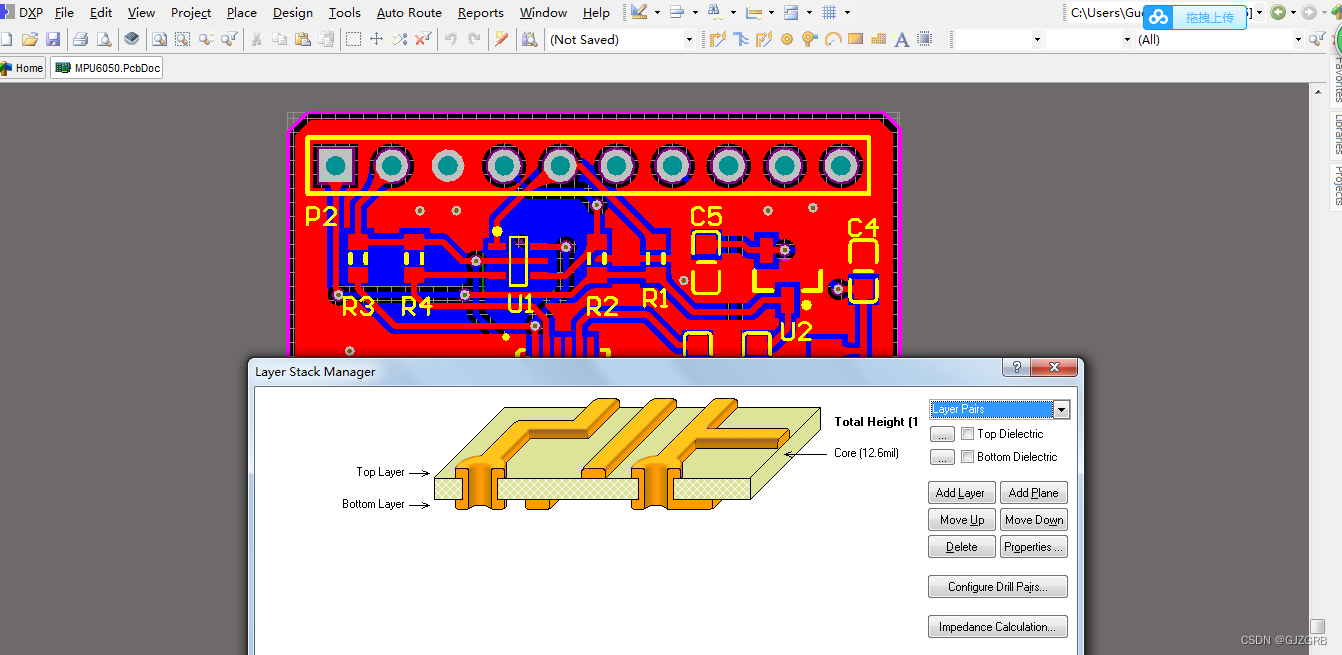
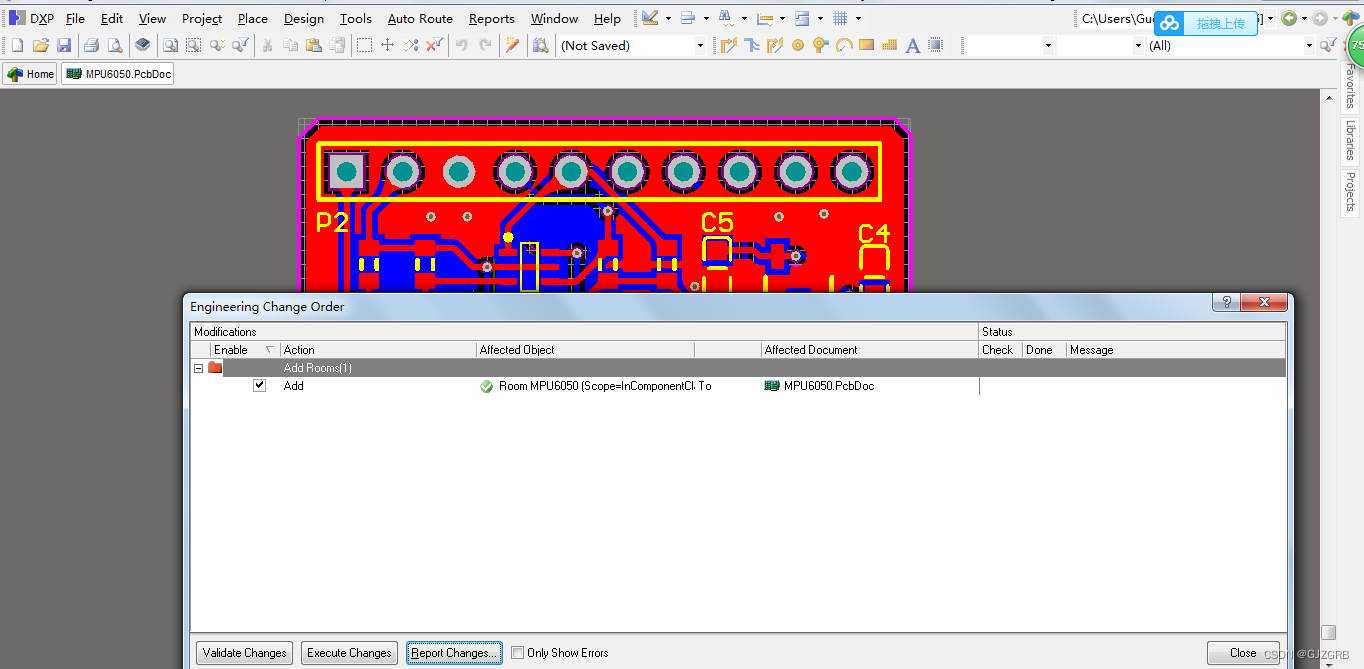
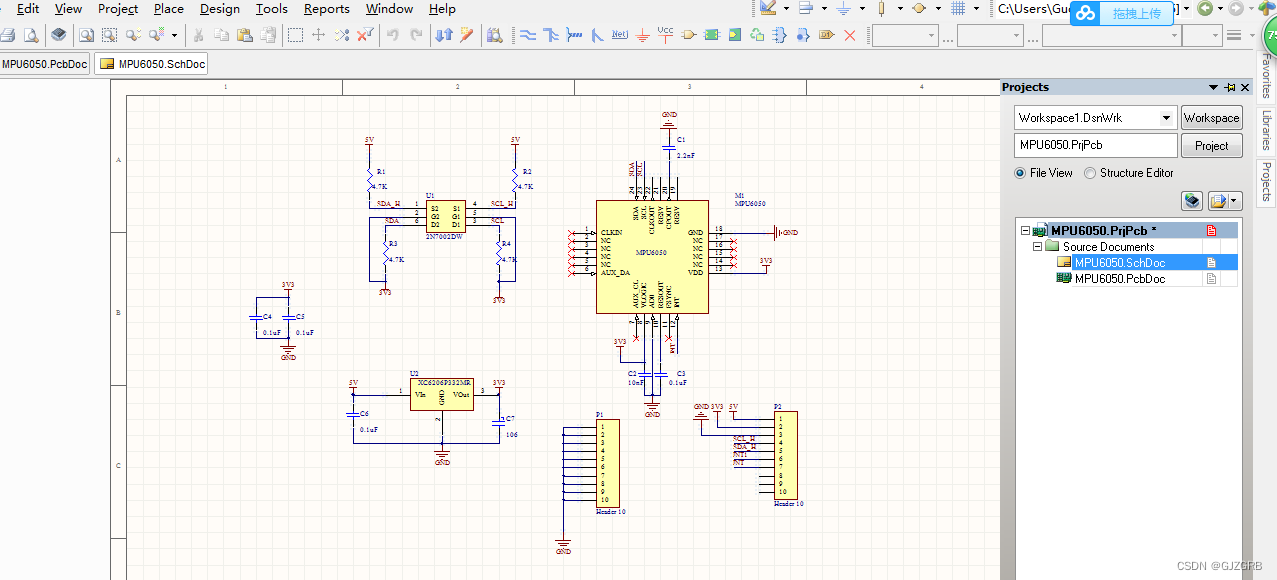
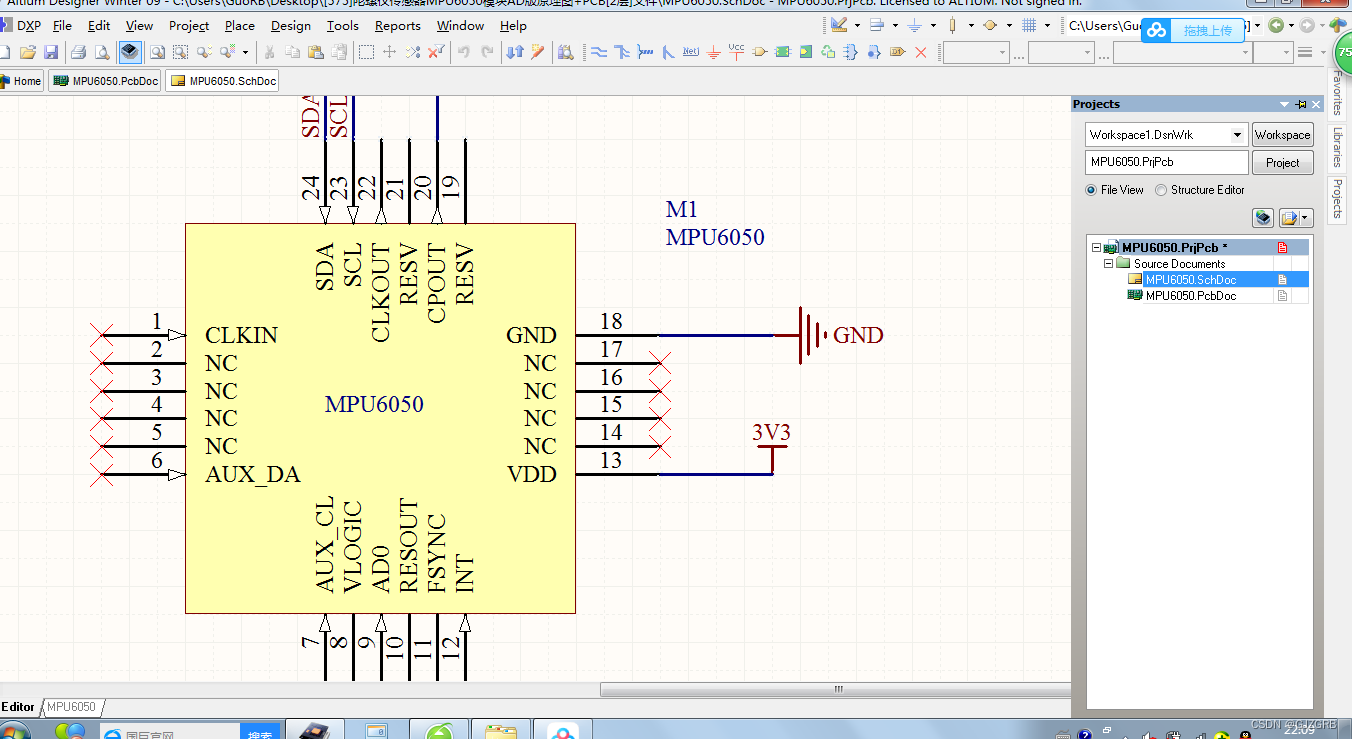
陀螺仪传感器MPU6050模块AD设计原理图PCB[2层]文件
 7万+
1680
5705
4万+
7万+
1680
5705
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























