






人工势场法 路径规划算法
势函数法 APF
简单,高效
ID:724745599178344
三九小博
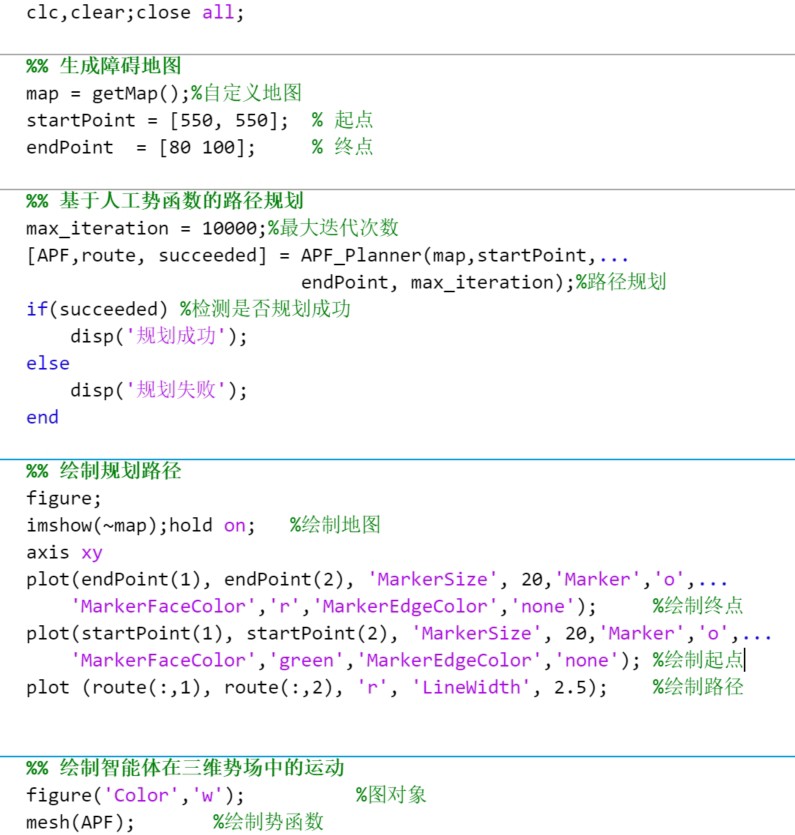
人工势场法(Artificial Potential Field, APF)是一种常用的路径规划算法,它通过构建势能场来指导机器人或无人车的运动。该方法简单而高效,能够在复杂环境中实现可靠的路径规划。
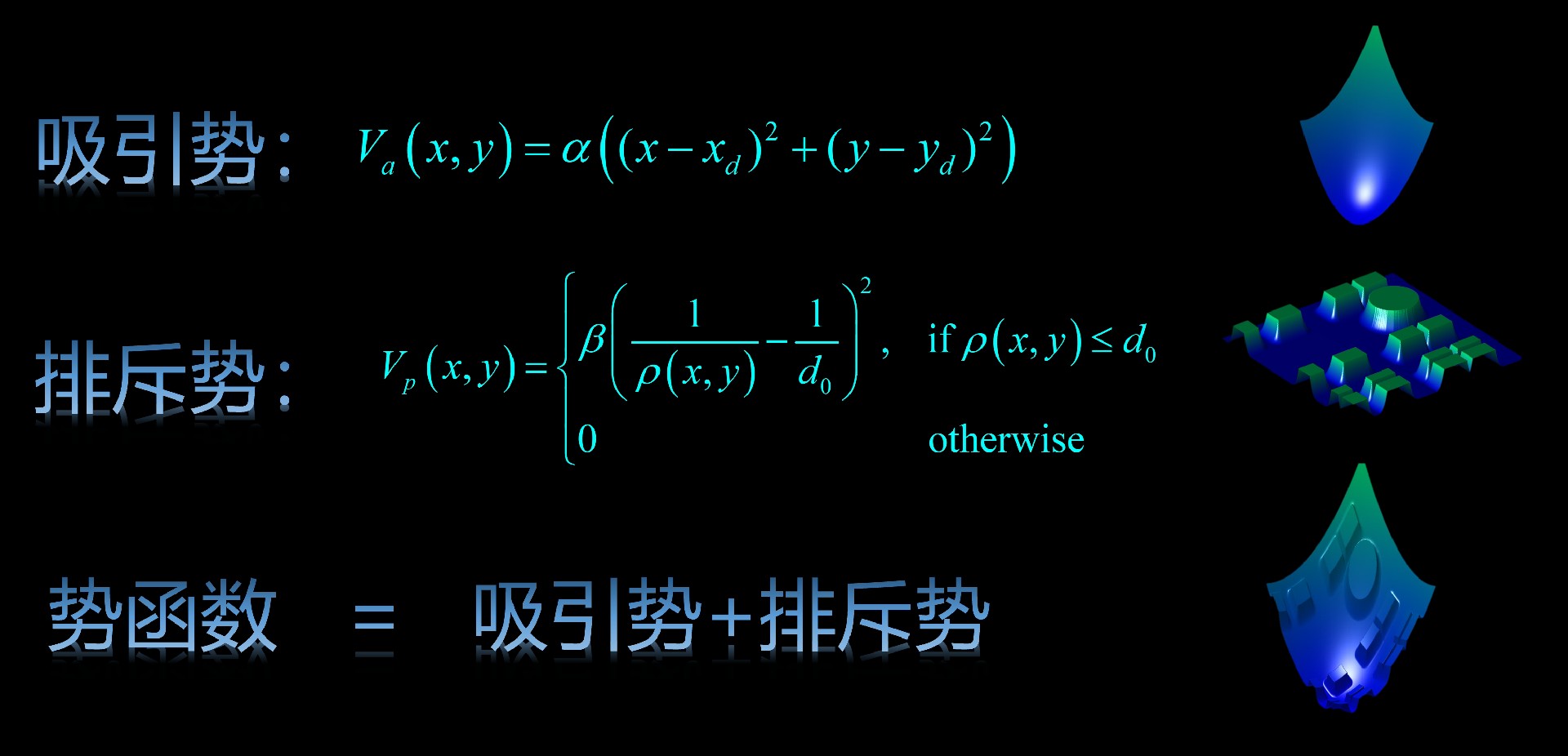
在人工势场法中,我们将机器人或无人车视为一个质点,环境中的障碍物视为一系列施加力的源点,通过在空间中建立一个势能场的模型来描述机器人的运动。势能场的构建通常基于两种力:吸引力和斥力。
首先,吸引力作用是通过目标点对机器人施加的力,将机器人吸引向目标点。吸引力的大小和方向由目标点与机器人的距离和方向决定。当机器人离目标点越远,吸引力越大;当机器人接近目标点时,吸引力逐渐减小。
其次,斥力是由障碍物对机器人施加的力,用于阻止机器人与障碍物碰撞。斥力的大小和方向由机器人与障碍物的距离和方向决定。当机器人离障碍物越近,斥力越大;当机器人远离障碍物时,斥力逐渐减小。
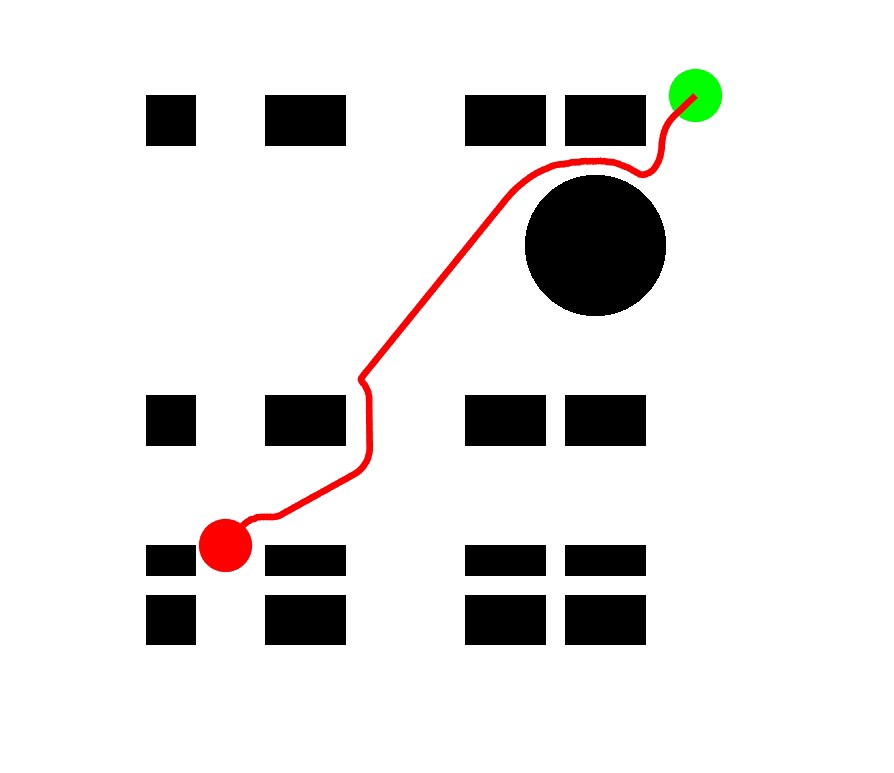
通过将吸引力和斥力叠加,我们可以得到机器人在环境中移动的方向和速度。具体而言,机器人会沿着总力的方向前进,速度与总力的大小成正比。当机器人接近目标点时,总力趋近于吸引力,使机器人顺利到达目标;当机器人接近障碍物时,总力趋近于斥力,使机器人绕过障碍物。
人工势场法的优势在于其简单性和高效性。由于只需计算机器人与目标点、障碍物之间的距离,以及计算力的方向与大小,算法的实现相对简单。此外,人工势场法能够在复杂环境中进行路径规划,包括避开动态障碍物和实时避让等,具有很高的实用性。
然而,人工势场法也存在一些限制。首先,容易出现局部最小点的问题,即机器人可能陷入局部最小点,无法找到全局最优路径。其次,斥力和吸引力的权衡也是一个挑战,若斥力过大,可能导致机器人无法到达目标点;若斥力过小,机器人可能与障碍物发生碰撞。
总而言之,人工势场法是一种简单而高效的路径规划算法,通过构建势能场来指导机器人的运动。虽然存在局部最小点和斥力-吸引力权衡等限制,但该方法仍然具有广泛的应用前景,并可以在实际工程中发挥重要作用。
以上相关代码,程序地址:http://wekup.cn/745599178344.html















 844
844

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









