







 ROS是机器人操作系统,提供软件解决方案堆栈,包括硬件驱动、通信架构等。ROS 1存在实时性等问题,不适合工业应用。ROS 2引入DDS,支持实时性、分布式、数据加密和现代编程语言,适合产品化。ROS 2已在多个实际案例中应用,如Ghost Robotics的四足机器人和Mission Robotics的水下机器人。极氪软件及电子中心基于ROS 2开发汽车操作系统。
ROS是机器人操作系统,提供软件解决方案堆栈,包括硬件驱动、通信架构等。ROS 1存在实时性等问题,不适合工业应用。ROS 2引入DDS,支持实时性、分布式、数据加密和现代编程语言,适合产品化。ROS 2已在多个实际案例中应用,如Ghost Robotics的四足机器人和Mission Robotics的水下机器人。极氪软件及电子中心基于ROS 2开发汽车操作系统。
极氪软件及电子中心王阳明
前言
ROS是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。ROS的原型源自斯坦福大学的STanford Artificial Intelligence Robot (STAIR) 和 Personal Robotics (PR)项目。
机器人的工业界和学术界在软件工具的使用上是有明显的分歧的。由于机器人的工业界并不像消费类电子这样出货量巨大,所以绝对高的技术壁垒和封闭的生态是十分常见的。为了提高自己的技术壁垒,这些公司往往会自己设计一整套封闭的软硬件,以达到让其他人(竞争对手或开发者)无法用自己的工具替换之的目的。而学术界,学生和老师们为了减少重复造轮子的工作,往往会拥抱开源社区,选择现有的工具进行开发和研究,最广为人知的便是ROS(Robot Operating System)
ROS是什么
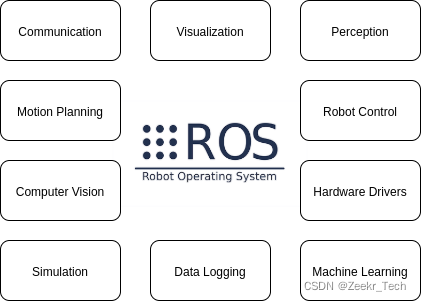
ROS/ROS 2并不是一个软件,而是一系列软件的集合。一般我们称之为软件解决方案堆栈。包含如硬件驱动程序、网络模块、通信架构和机器人算法实现等等。ROS将所有这些功能包放在一个保护伞下,因此开发人员无需重新造轮子。
ROS并不是一个操作系统,而一般称之为元操作系统,即基于操作系统以上的类操作系统。
ROS并不是一个中间件,因为它实现了包括感知、导航、控制、运动规划和仿真等多种功能。
ROS
ROS1.0版本发布于2010年,基于PR2机器人开发了一系列机器人相关的基础软件包。随后ROS版本迭代频繁,ROS的版本一般会随着Ubuntu系统长期支持(LTS)版本而更新,其中ROS目前最新的版本都已经适配到Ubuntu 20.04 LTS。ROS仅在Ubuntu上进行CI测试,但是社区成员积极支持其他Linux版本、Mac OS X、Android、Windows,使得ROS可以兼容,但仅提供有限制性的功能支持。
ROS的历史版本
| ROS版本 |
发布时间 |
Ubuntu版本 |
| May 23rd, 2020 |
Ubuntu 20.04(Focal) |
|
| May 23rd, 2018 |
Ubuntu 18.04(Bionic) |
|
| May 23rd, 2017 |
Ubuntu 17.04(Zesty) |
|
| May 23rd, 2016 |
Ubuntu 16.04(Xenial) |
|
| May 23rd, |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









