






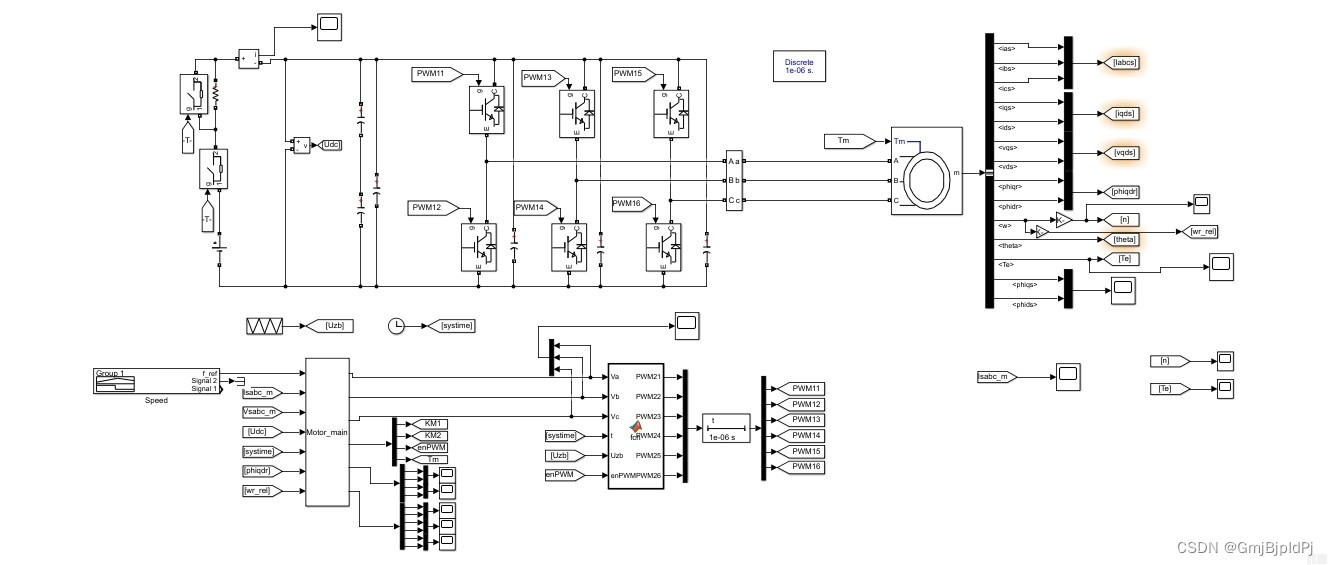
异步电机有速度传感器矢量控制算法的C代码+仿真模型,仿真采用C代码直接在Simulink模型里进行仿真的方式,当你不具备硬件调试的条件时,可以通过这种方法直接对代码进行仿真验证,所见即所得
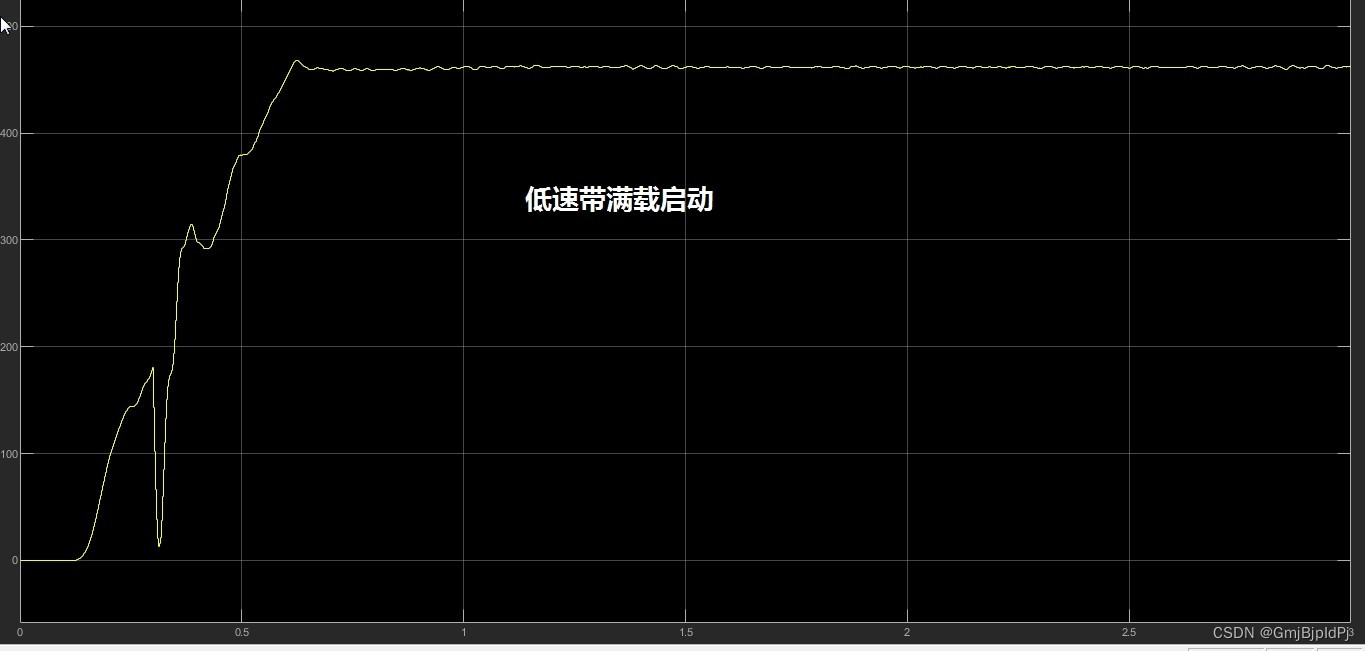
采用双闭环解耦控制算法,转速外环电流内环,转矩与励磁解耦控制,SVPWM空间电压矢量调制,电流谐波很小,转速控制精度高 可实现低速直接带满载启动 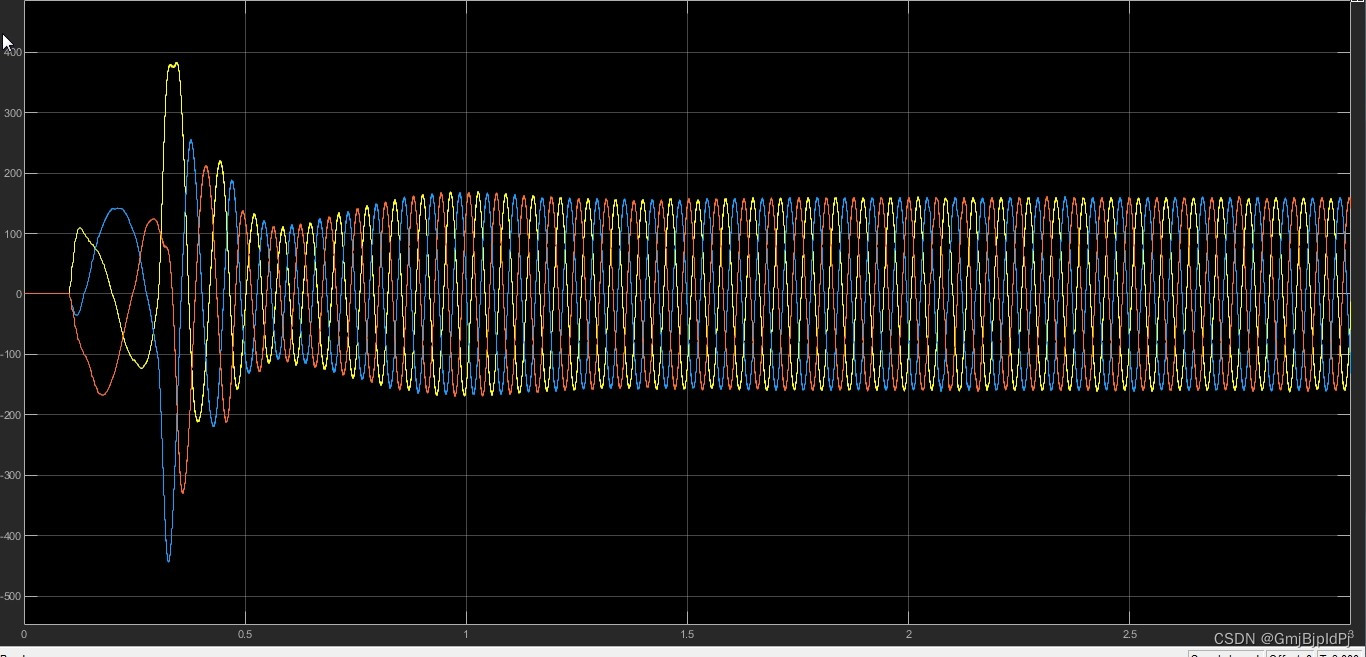
异步电机是一种广泛应用的电动机,其应用范围涵盖了各行各业。在其应用中,速度控制一直是一个重要的课题。而速度传感器矢量控制算法是一种有效的控制方法,能够实现对异步电机的精准控制。
本文将介绍一种基于速度传感器的矢量控制算法的C代码+仿真模型,以及采用双闭环解耦控制算法的异步电机控制方法。
一、异步电机速度传感器矢量控制算法的C代码+仿真模型
异步电机速度传感器矢量控制算法是一种基于矢量控制原理的控制方法,它可以通过对电机电流进行控制,实现对电机速度的精准控制。该算法通过将电机电流和磁场矢量拆分为水平和垂直方向,实现对电机速度和转矩的独立控制。
仿真模型采用在Simulink模型里直接进行仿真的方式,通过输入仿真数据,可以直接对代码进行仿真验证,快速找出问题所在。
二、双闭环解耦控制算法的异步电机控制方法
双闭环解耦控制算法是一种高效的控制方法,通过将速度控制和转矩控制分别放在外环和内环进行控制。在该算法中,控制精度高,转速控制精度可以达到0.01%以下,同时谐波很小,能够满足各种应用场景的需求。
在该算法中,采用SVPWM空间电压矢量调制,通过对磁通和电压进行控制,实现对电机电流的控制。该算法还采用了电流内环控制,通过对电流进行控制,实现对电机转矩的控制。同时,在控制系统设计中,还将励磁和转速解耦进行控制,从而进一步提升控制精度。
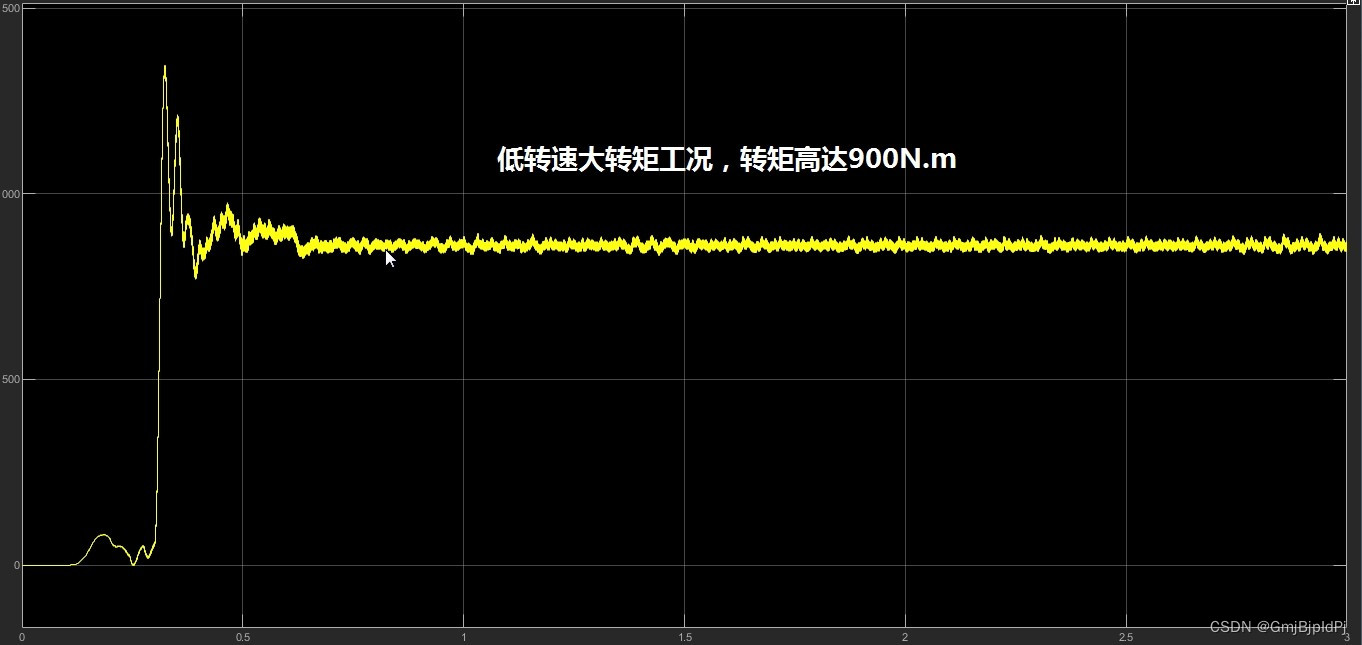
三、实现低速直接带满载启动
在异步电机应用场景中,低速直接带满载启动一直是一个难点问题。而在双闭环解耦控制算法中,对低速直接带满载启动的需求得到了很好的实现。
通过对电机的转速和转矩进行控制,实现电机在低速直接带满载启动时的控制。同时,采用了高效的控制算法,使得控制系统在低速运行时也能够保证精度和稳定性。
综上所述,本文介绍了基于速度传感器的矢量控制算法的C代码+仿真模型,以及采用双闭环解耦控制算法的异步电机控制方法。该方法具有控制精度高、转速控制精度高、低速直接带满载启动等优点,能够满足各种应用场景的需求。同时,本文还介绍了仿真模型的设计原理,为电机控制系统的设计提供了参考。
相关代码,程序地址:http://lanzouw.top/688079231922.html















 506
506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









