







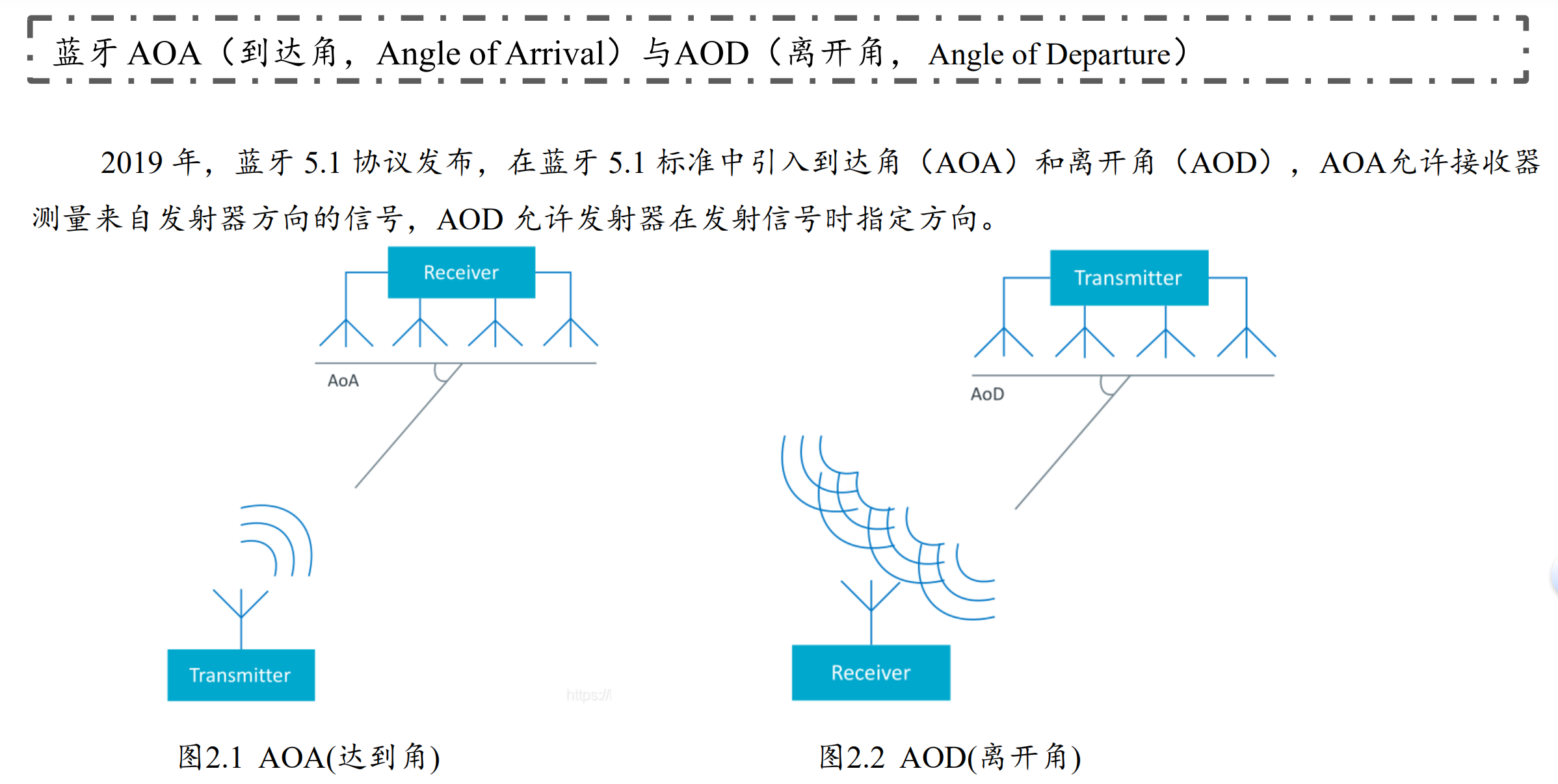
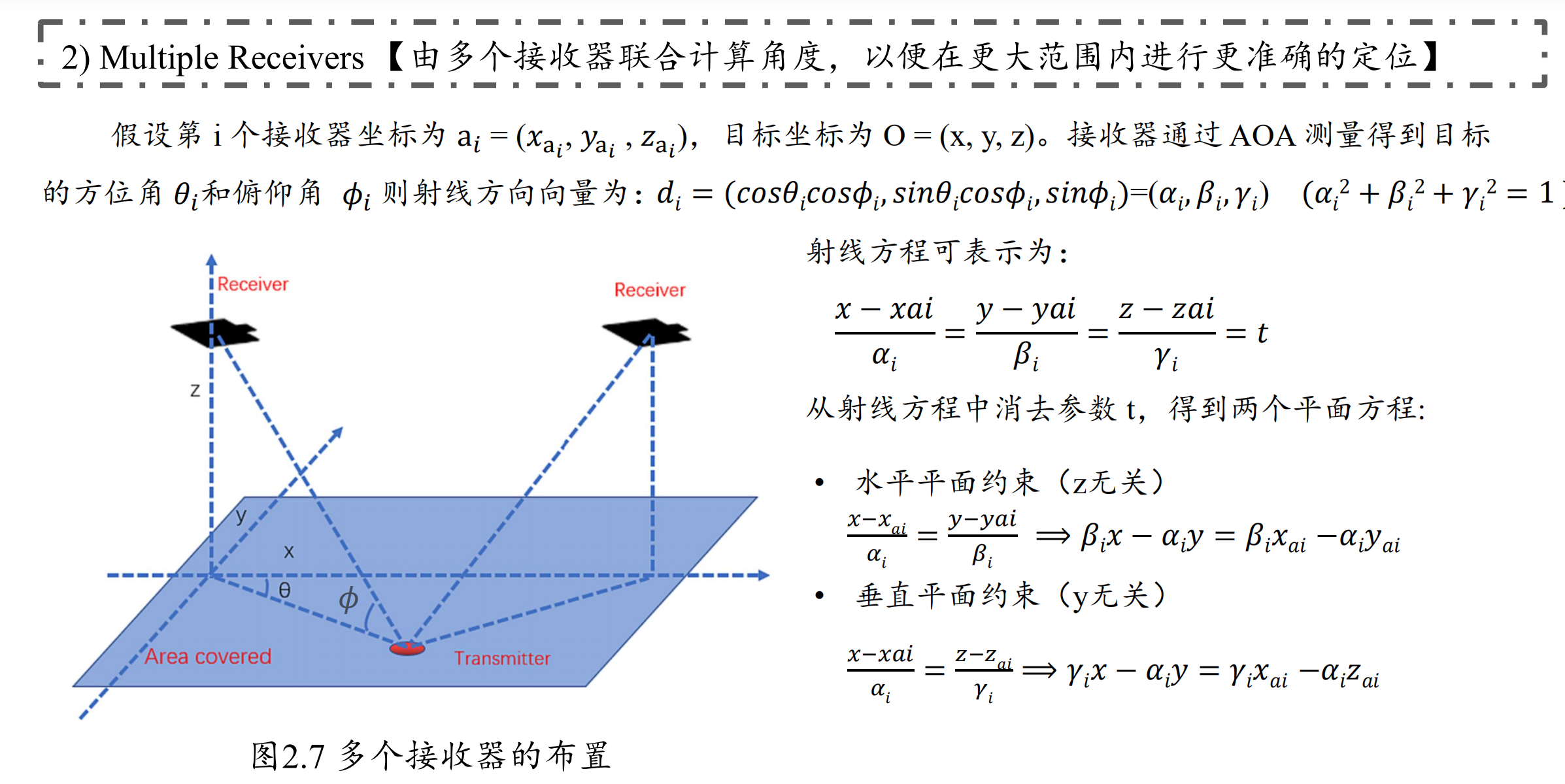
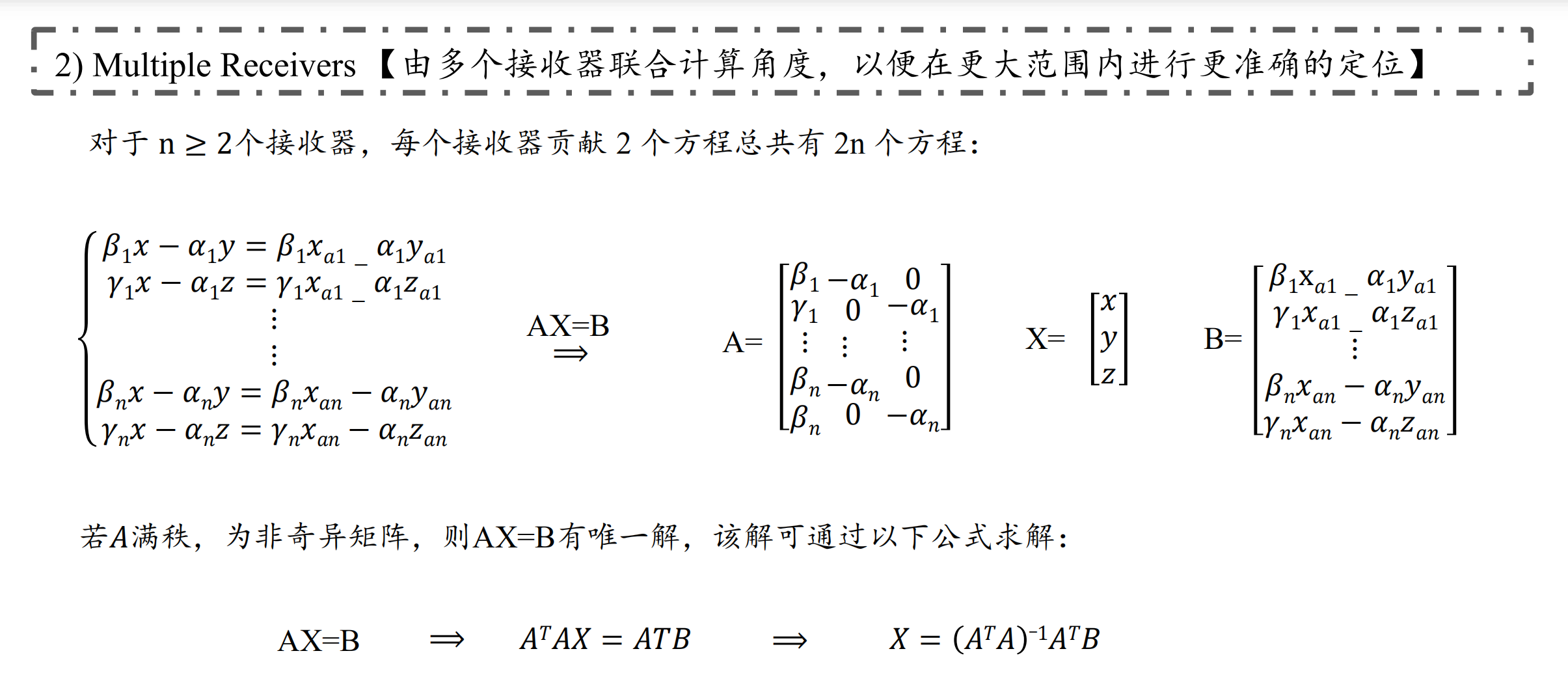
蓝牙 AOA 定位的本质是通过相位差计算角度,核心原理是通过接收端的天线阵列测量蓝牙信号从发射端(目标设备)到达接收端的角度,再结合多接收点的角度数据,通过三角定位算法计算出目标的具体位置。
1.关键组成部分
| 组成部分 | 核心功能 |
|---|---|
| 发射端(Tag) | 广播蓝牙 AOA 定位数据包 |
| 接收端(基站) | 天线阵列接收信号、测量相位差、上传原始数据 |
| 定位服务器 | 运行 AOA 算法、计算角度与坐标、输出定位结果 |
| 业务应用层 | 展示定位结果、实现业务功能(如轨迹追踪、区域报警) |
2.基础设定
1)坐标系定义
2D 场景:采用平面直角坐标系(x 轴:水平向右,y 轴:竖直向上;或根据实际场景调整,如 x 轴正北、y 轴正东)。
3D 场景:采用空间直角坐标系(x 轴:水平向右,y 轴:竖直向上,z 轴:垂直于平面向外;或遵循右手定则)。
2)已知量
各基站的精确坐标:设基站 1 坐标为(x1, y1)(2D)或(x1, y1, z1)(3D),基站 2 坐标为(x2, y2)(2D)或(x2, y2, z2)(3D),以此类推。
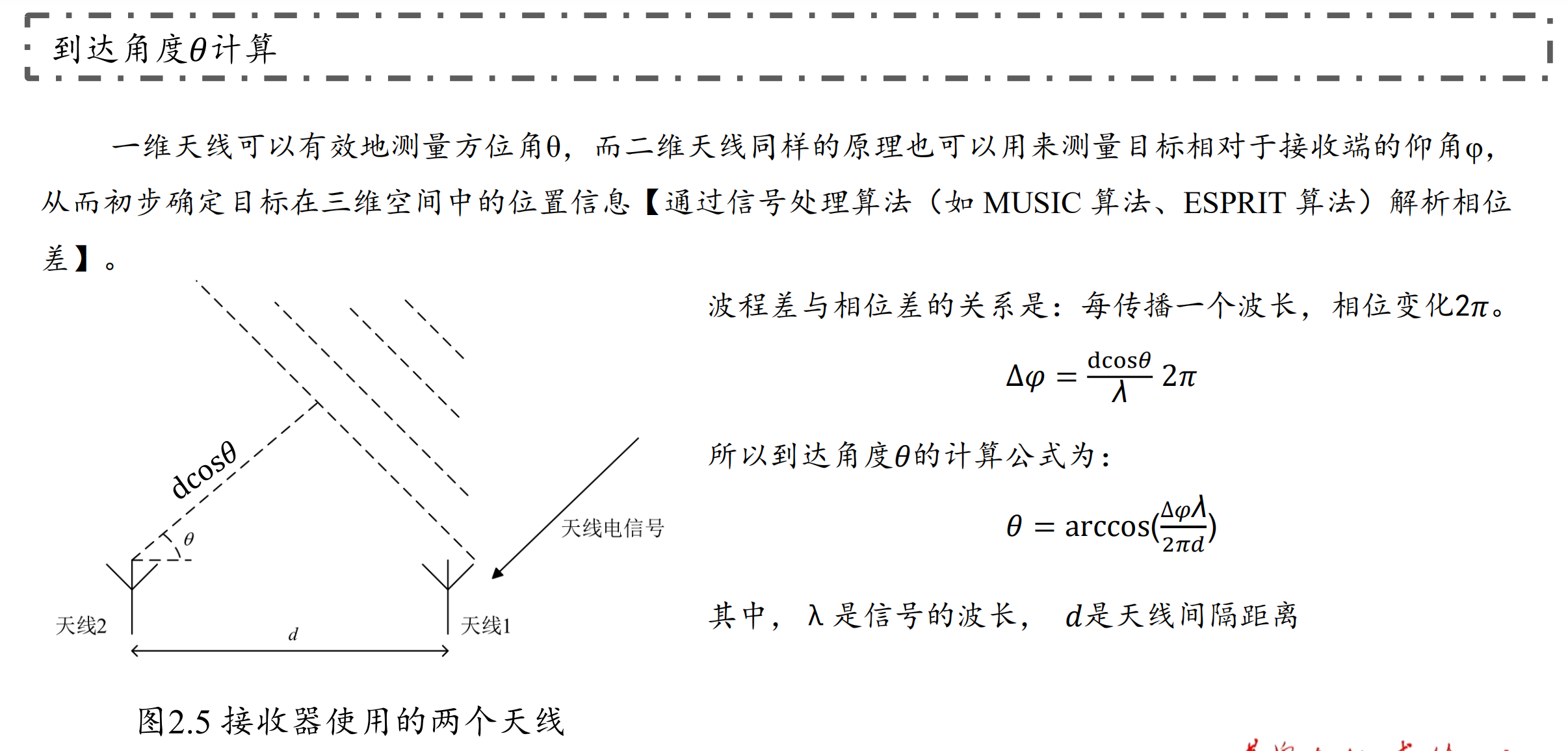
各基站测量的到达角:
- 2D 场景:仅需方位角θ(信号与坐标系基准方向的夹角,如 x 轴正方向逆时针旋转的角度,范围(0-360)。
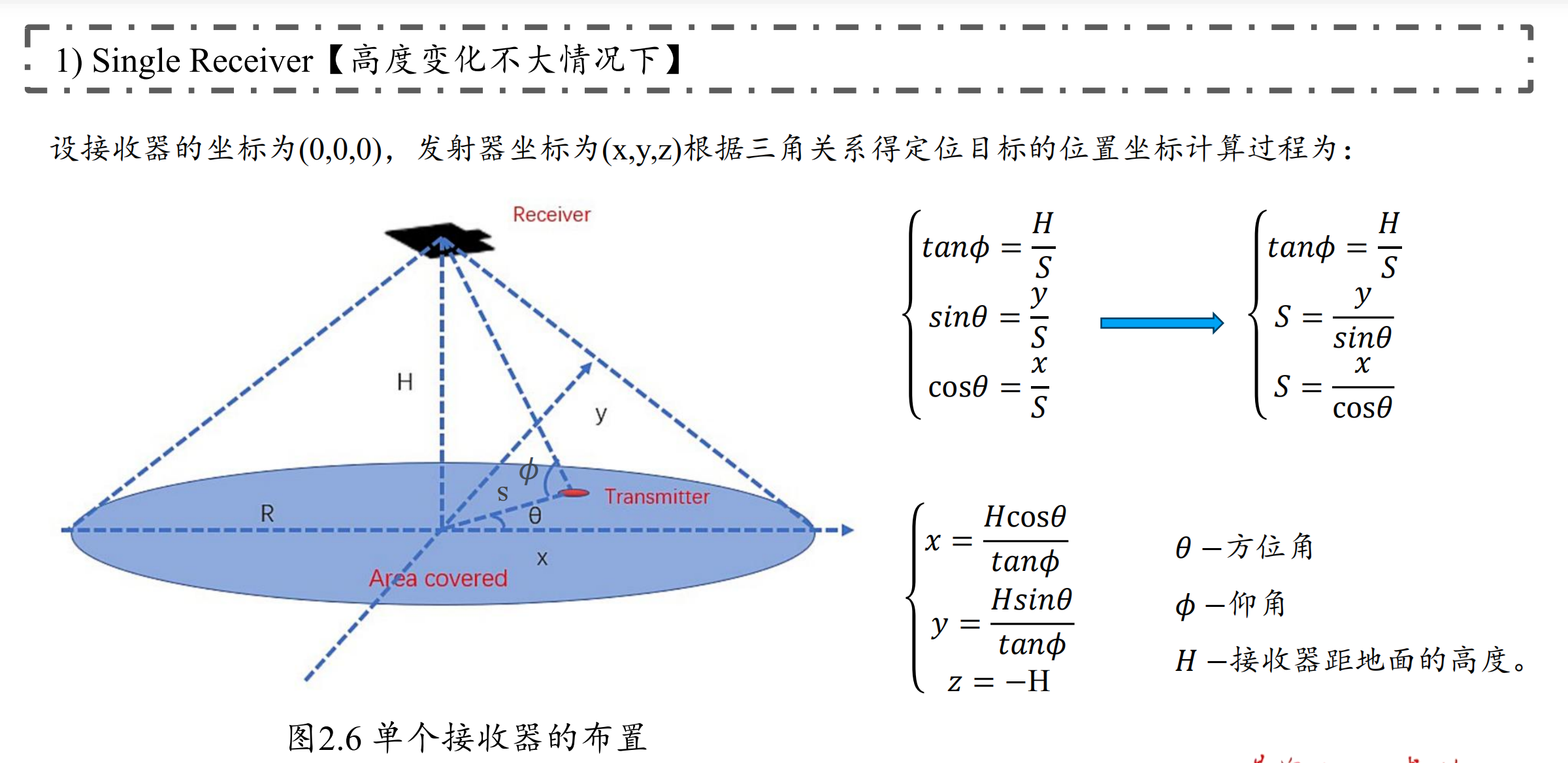
- 3D 场景:需方位角θ + 仰角φ(信号与水平面的夹角,向上为正,范围(-90- 90)。
3)未知量
目标设备(Tag)的坐标(x, y)(2D)或(x, y, z)(3D)
3.求解过程

















 1586
1586

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









