







几何精度因子(DOP, Dilution of Precision)是衡量卫星几何分布对 GNSS 定位精度影响的核心指标,本质是 “观测误差的放大系数”—— 卫星几何构型越优(分布均匀、覆盖广),DOP 值越小,定位误差被放大的程度越低;反之则 DOP 值越大,定位精度越差。它不直接代表定位误差,而是通过量化卫星几何质量,为定位可靠性提供判断依据。
一、DOP 的核心概念
1. 本质与作用
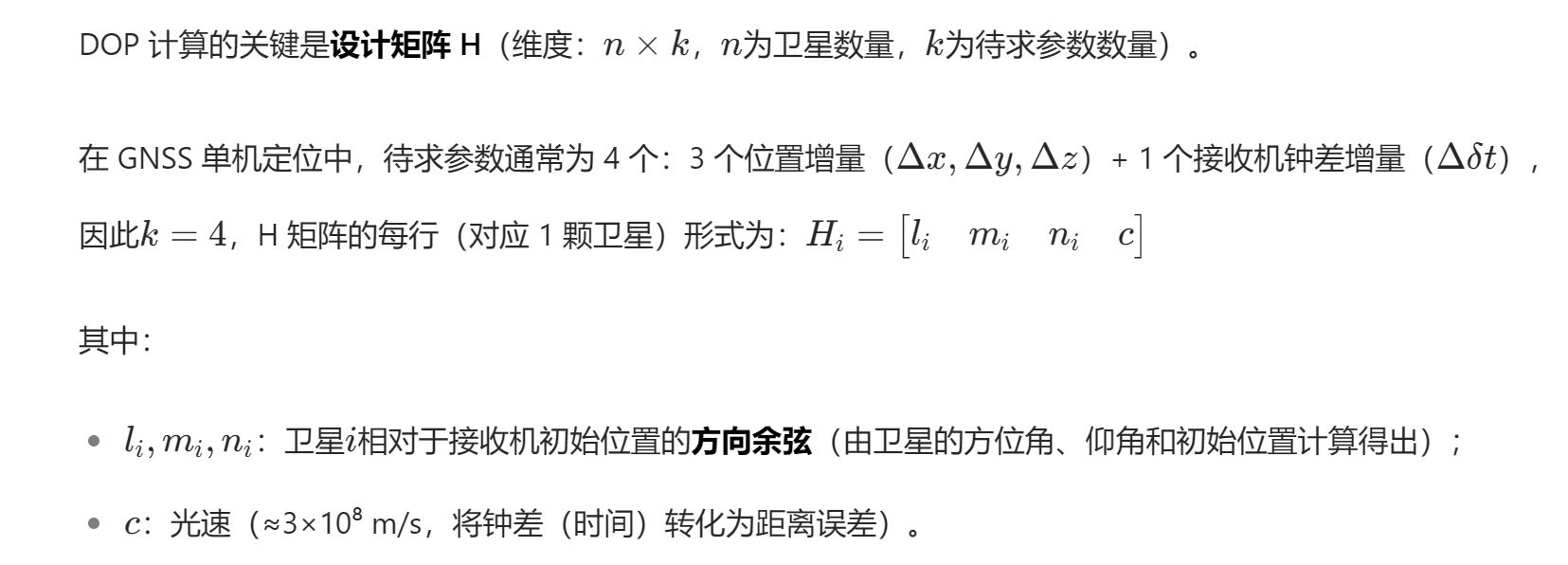
- 本质:由卫星与接收机的空间几何关系决定,反映 “线性观测方程中待求参数(如位置、钟差)的解算精度灵敏度”。
- 核心作用:
- 评估卫星组合的几何质量(DOP 越小,几何构型越优);
- 关联观测误差与定位误差:定位误差 = DOP × 观测误差(如观测误差为 1m,PDOP=2,则定位误差约 2m);
- 指导选星(如优先选择 DOP<3 的卫星组合)。
2. 常见 DOP 类型及含义
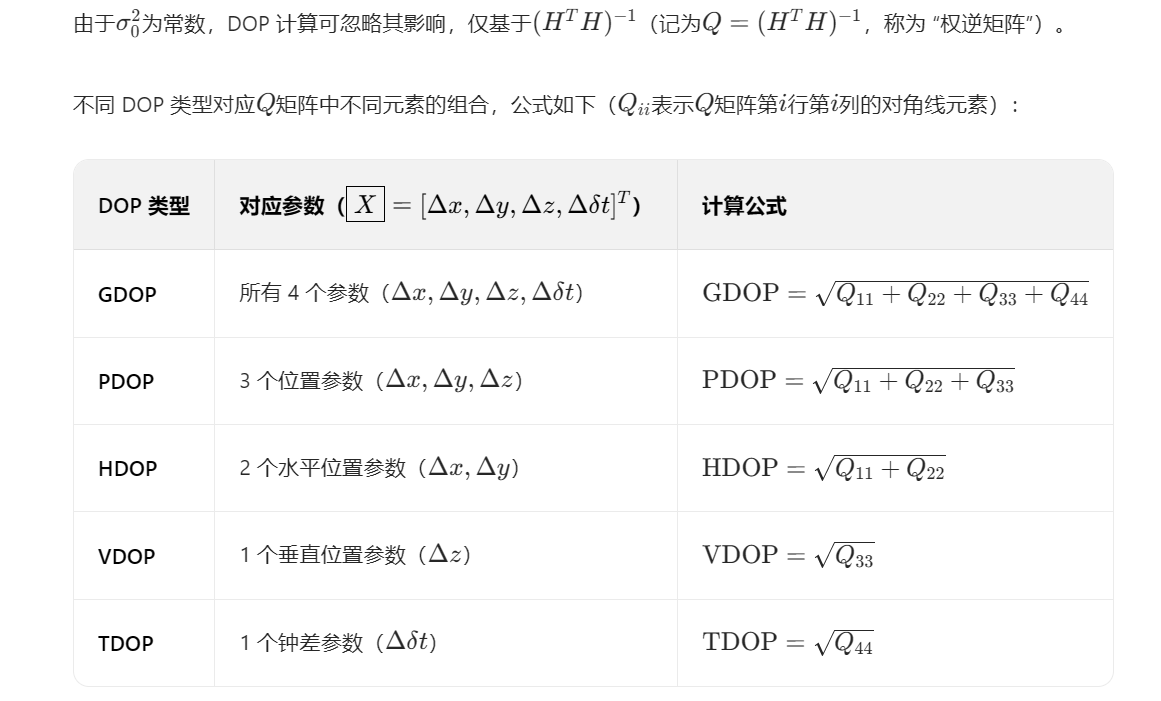
不同 DOP 类型对应不同定位维度的精度评估,核心类型如下表:
| 类型缩写 | 全称 | 评估维度 | 数学含义(后续计算会用到) | 适用场景 |
|---|---|---|---|---|
| GDOP | 几何精度因子 | 3 维位置 + 接收机钟差 | 位置参数 + 钟差参数的精度贡献总和 | 需同时保证位置和时间精度(如高精度授时) |
| PDOP | 位置精度因子 | 3 维位置(经度 + 纬度 + 海拔) | 经度、纬度、海拔参数的精度贡献总和 | 3 维定位(如无人机、测绘) |
| HDOP | 水平精度因子 | 水平位置(经度 + 纬度) | 经度、纬度参数的精度贡献总和 | 车载导航(重点关注水平位置) |
| VDOP | 垂直精度因子 | 垂直位置(海拔) | 海拔参数的精度贡献 | 航空、无人机(高度精度要求高) |
| TDOP | 时间精度因子 | 接收机钟差 | 钟差参数的精度贡献 | 授时场景(如 5G 基站时间同步) |
二、DOP 的计算方法
DOP 的计算基于 GNSS 线性观测方程的设计矩阵(H 矩阵) 和最小二乘解的协方差矩阵,核心逻辑是:通过协方差矩阵量化待求参数的解算误差,再通过特定组合(如位置参数的误差之和开平方)得到 DOP 值。
1. 计算前提与基础公式
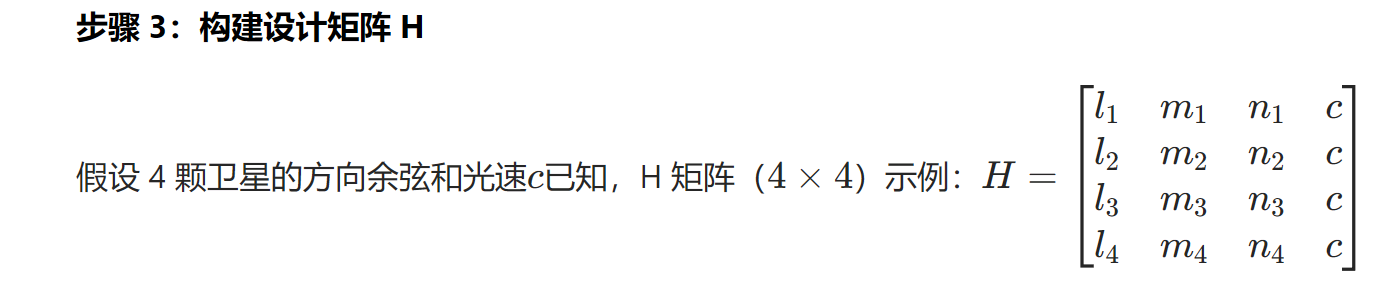
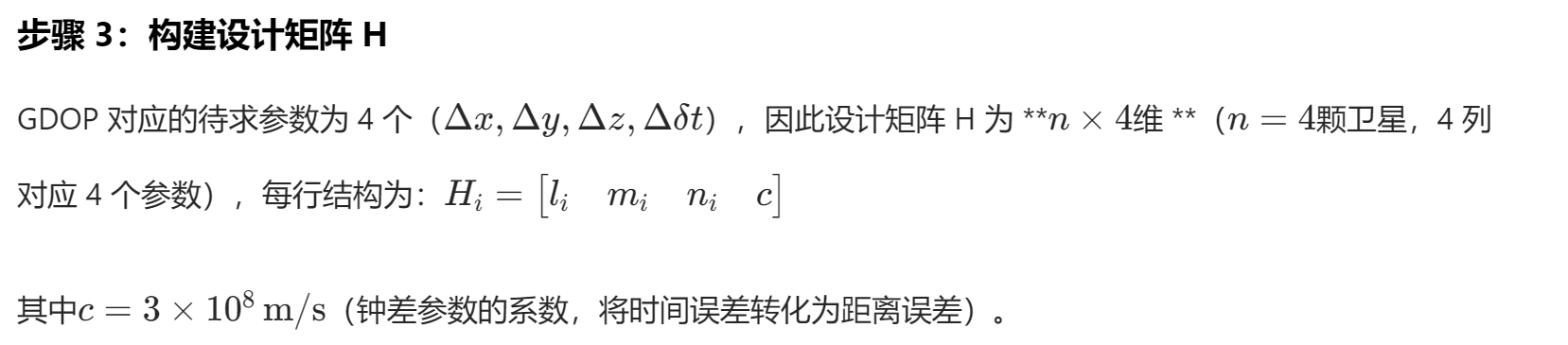
(1)核心输入:设计矩阵 H
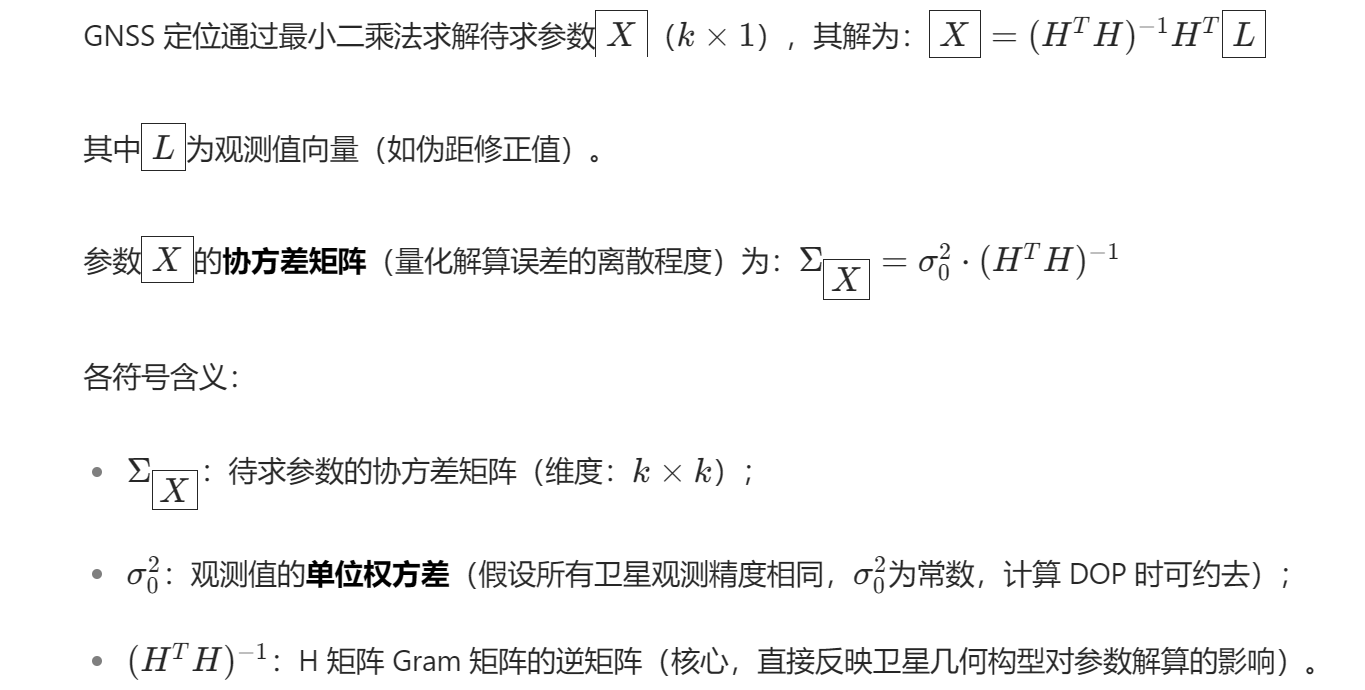
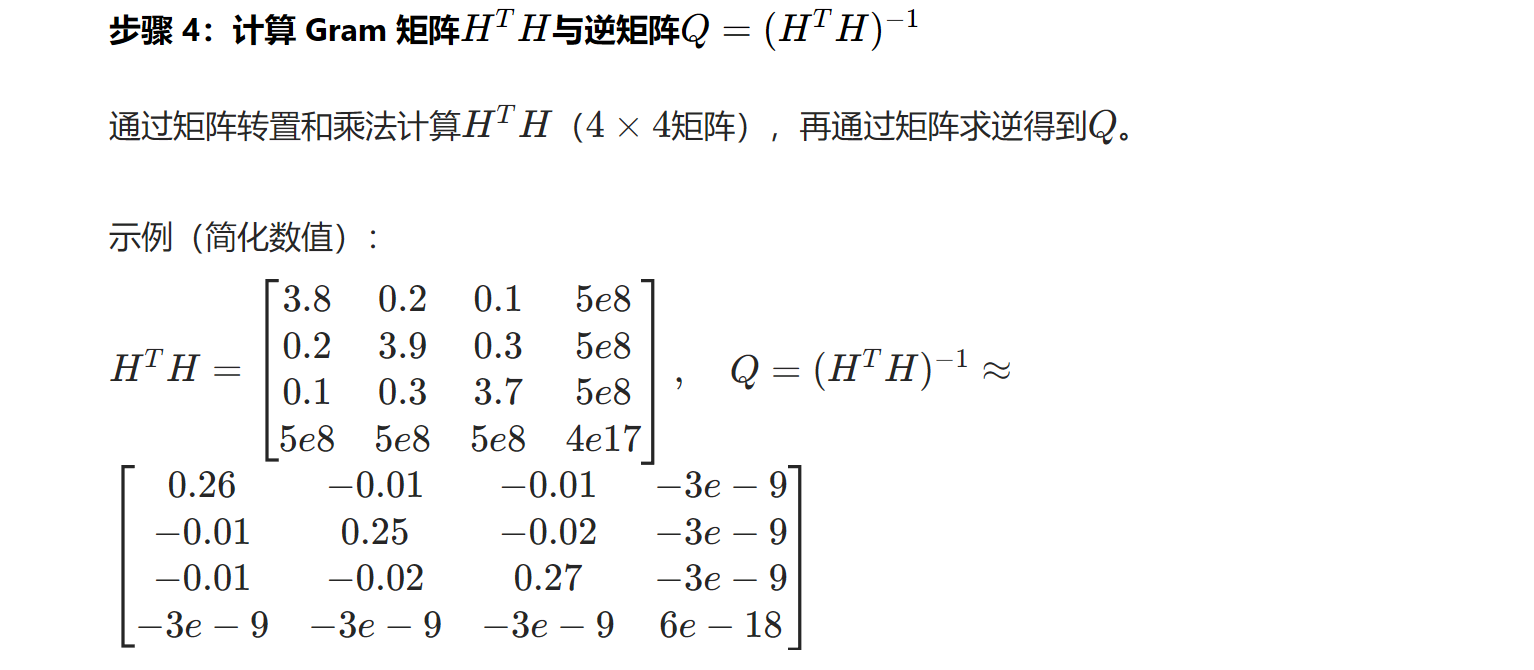
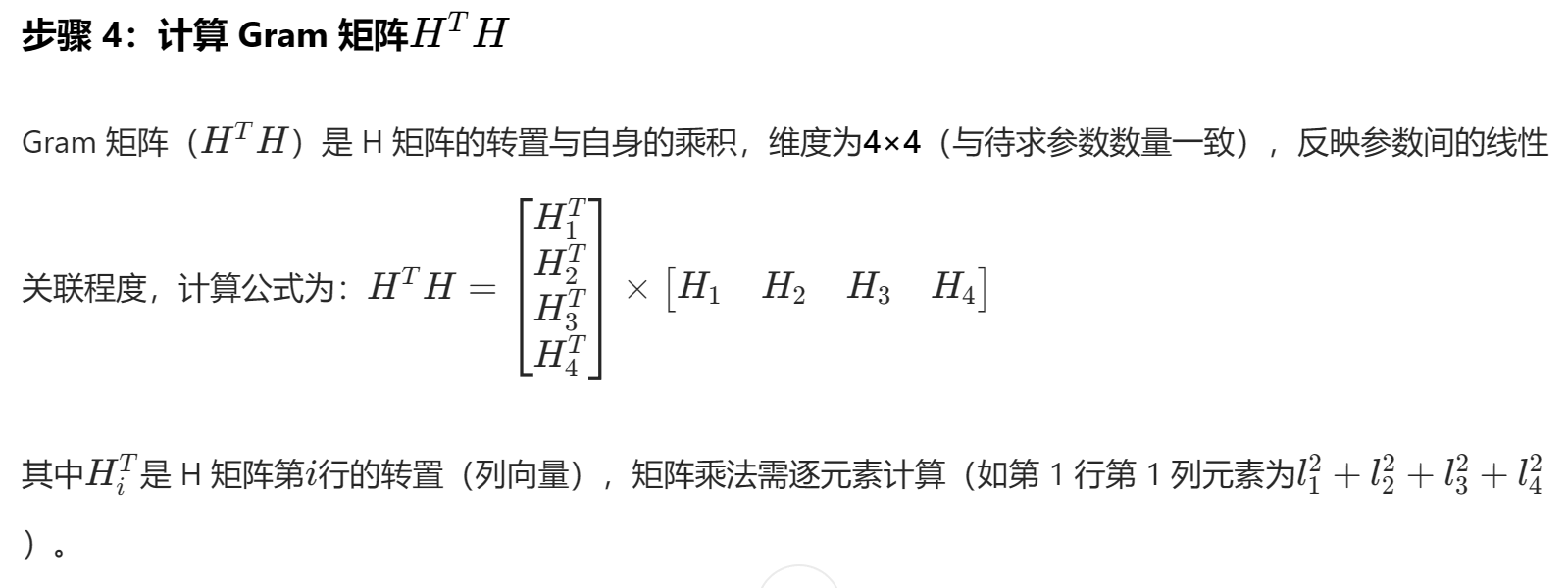
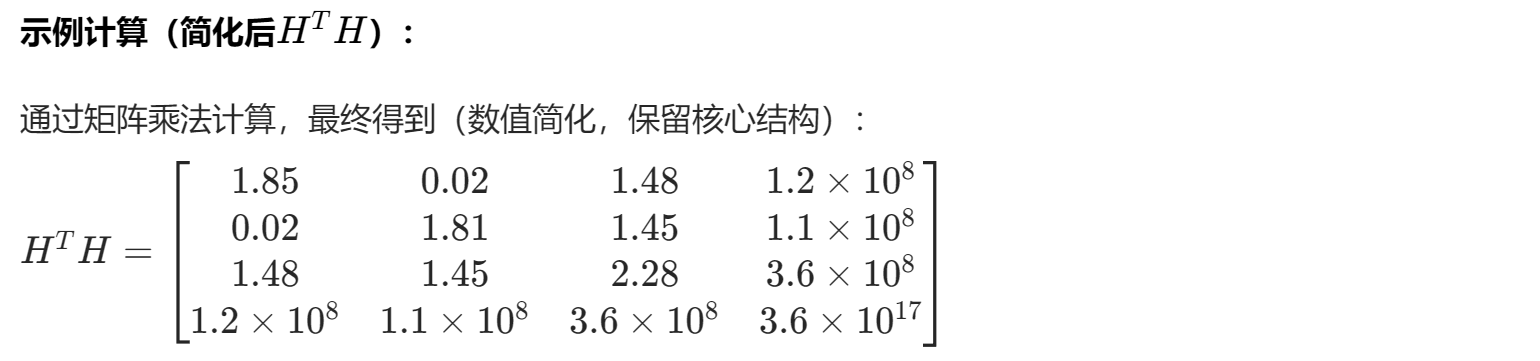
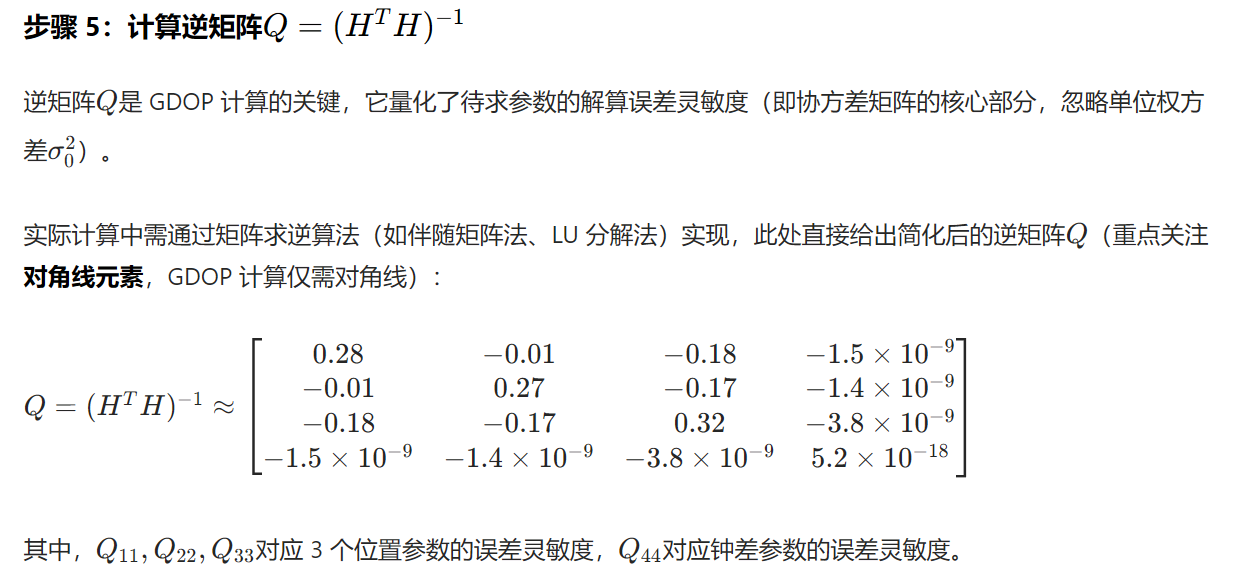
(2)最小二乘解的协方差矩阵
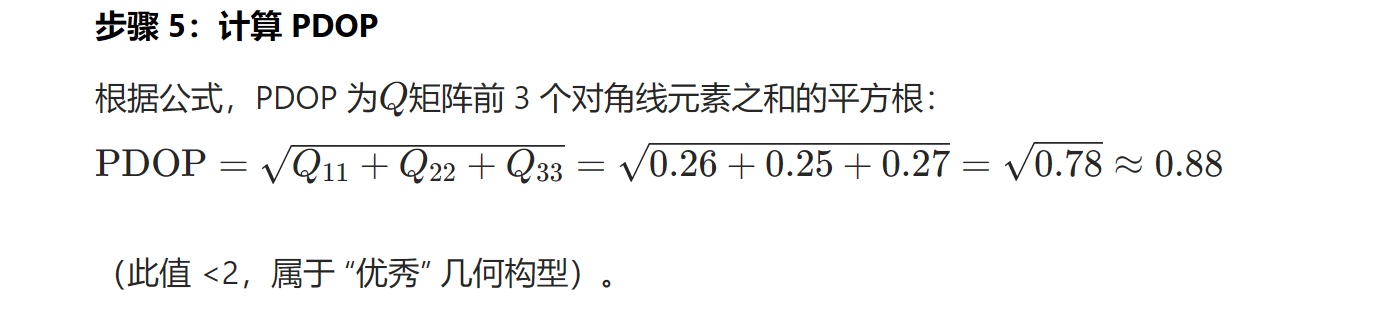
2. 具体 DOP 值的计算
3. 计算步骤(以 PDOP 为例)
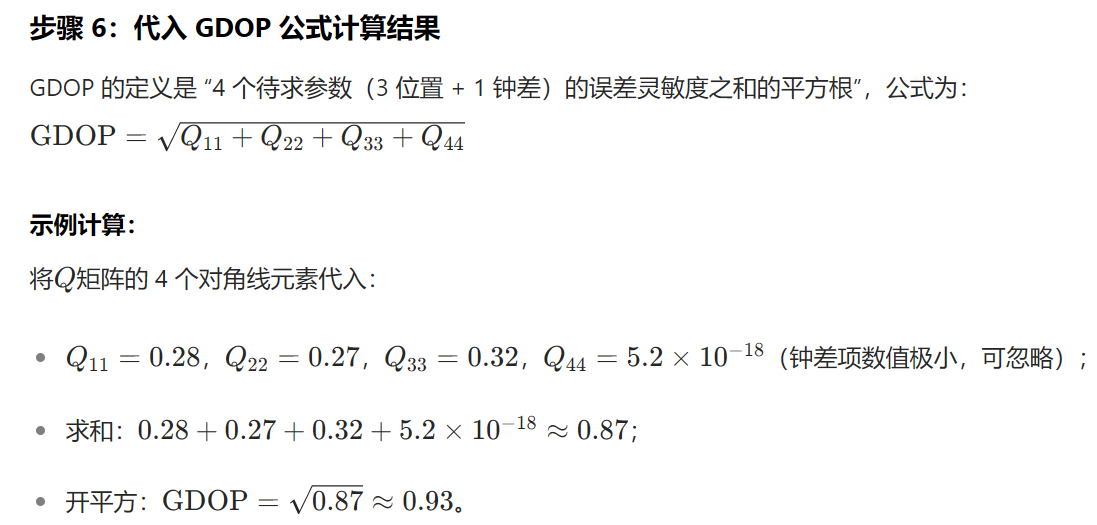
4. 计算步骤(以 GDOP 为例)
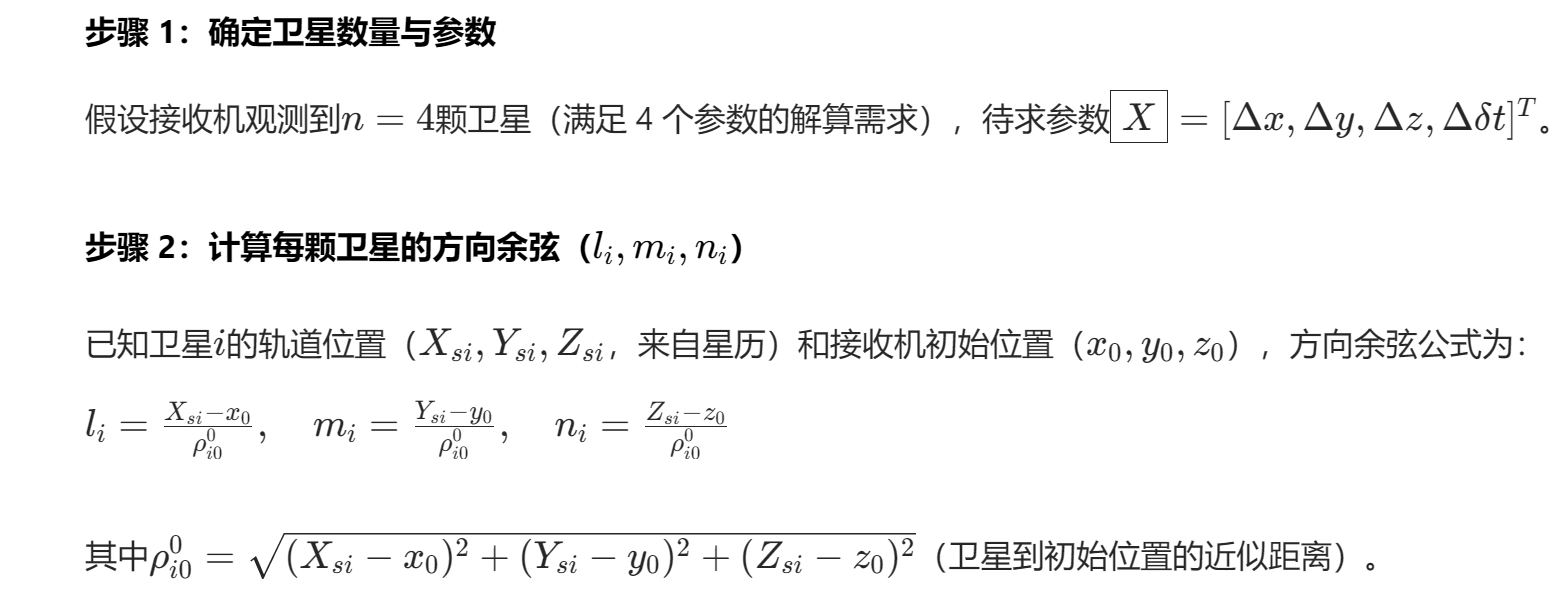
步骤 1:准备输入数据(卫星位置与初始位置)
假设 4 颗卫星(编号 1-4)的轨道位置和接收机初始位置如下(简化数值,便于计算):
| 卫星编号 | 卫星位置(Xi, Yi}, Zi)/m | 接收机初始位置(x0, y0, z0)/m |
|---|---|---|
| 1 | (20000000, 15000000, 25000000) | (1000000, 800000, 150000) |
| 2 | (18000000, -16000000, 24000000) | (1000000, 800000, 150000) |
| 3 | (-19000000, -14000000, 23000000) | (1000000, 800000, 150000) |
| 4 | (-21000000, 17000000, 26000000) | (1000000, 800000, 150000) |
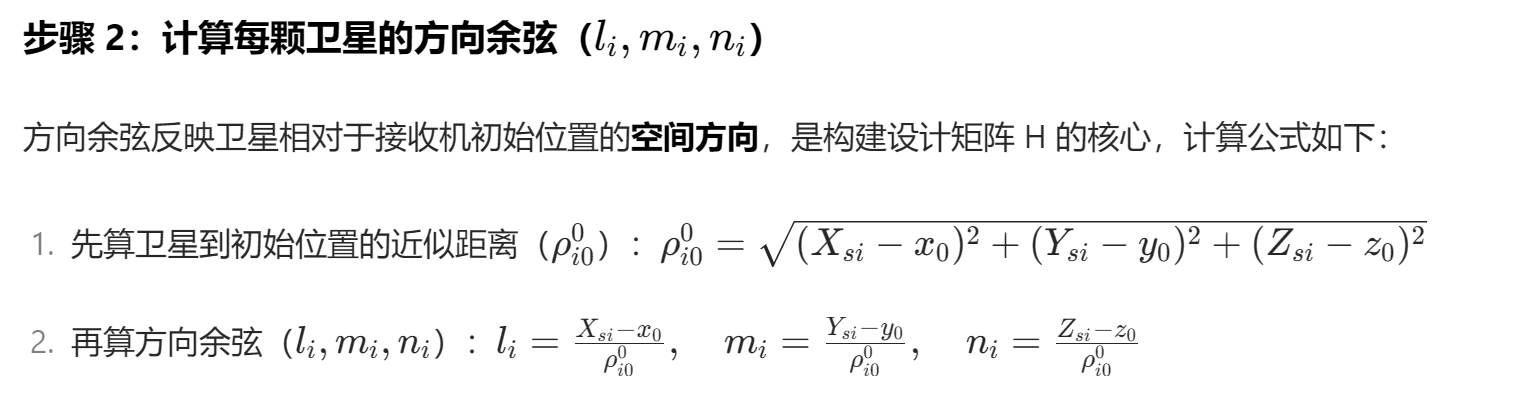
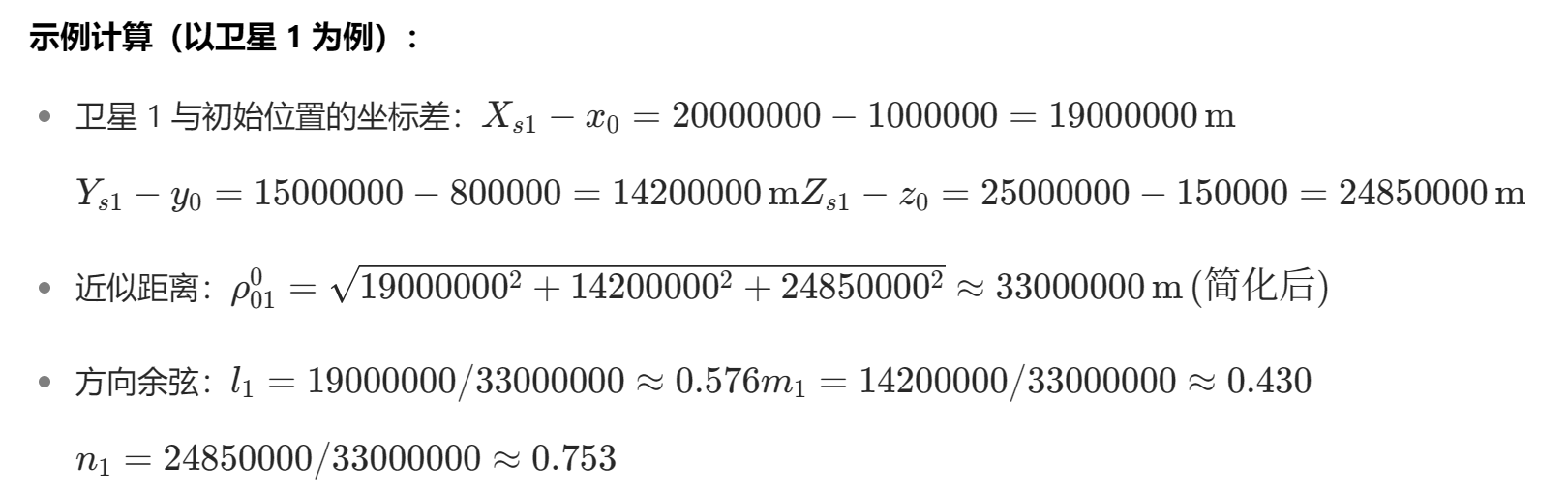 同理计算 4 颗卫星的方向余弦,结果汇总(简化后):
同理计算 4 颗卫星的方向余弦,结果汇总(简化后):
| 卫星编号 | li | mi | ni |
|---|---|---|---|
| 1 | 0.576 | 0.430 | 0.753 |
| 2 | 0.530 | -0.495 | 0.727 |
| 3 | -0.594 | -0.438 | 0.697 |
| 4 | -0.656 | 0.528 | 0.797 |

三、关键影响因素与总结
1. 核心影响因素
DOP 值完全由卫星几何分布决定,与观测误差无关:
-
卫星数量:并非越多越好,4 颗均匀分布的卫星比 10 颗集中的卫星 DOP 更小;
-
分布均匀性:卫星覆盖东、南、西、北、天顶等区域时,DOP 最小;
-
仰角:中高仰角卫星(20°-70°)为主的组合,DOP 通常优于低仰角卫星为主的组合。
2. 总结
-
概念本质:DOP 是 “卫星几何构型→参数解算误差” 的桥梁,量化误差放大程度;
-
计算核心:基于设计矩阵 H 的协方差矩阵,不同 DOP 对应参数误差的不同组合;
-
实际意义:DOP<2 为优秀,2≤DOP<3 为良好,DOP≥5 时定位精度显著下降,需重新选星。

















 2577
2577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









