







学习目标:
- 实现esp32联网控制舵机模块转动
学习内容:
- 如何实现用esp32搭建web服务器
- 如何用html5+css语言设计网页
- 如何控制舵机
具体实现过程:
模块介绍:
1.

2.
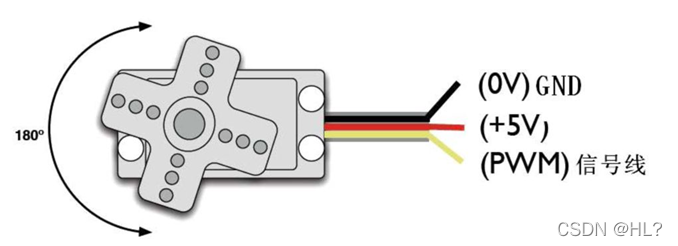
3. 接线:
| 舵机 | Esp32 |
|---|---|
| 棕色线 | Gnd |
| 红色线 | Vcc |
| 黄色线 | D5 |
舵机,学习可以参考:https://blog.csdn.net/H_L_J_/article/details/123813913
4. 创建一个boot.py文件,联网
try:
import usocket as socket
except:
import socket
from machine import Pin, PWM
import network
# 舵机用的串口
d = PWM(Pin(5), freq=50, duty=0)
# 手机开热点的热点名称,或路由器wifi名
ssid = ''
# 热点的密码,或路由器wifi密码
password = ''
station = network.WLAN(network.STA_IF)
station.active(True)
station.connect(ssid, password)
while station.isconnected() == False:
pass
print('Connection successful')
print(station.ifconfig())
参考网站 https://blog.csdn.net/H_L_J_/article/details/123840095?spm=1001.2014.3001.5501
5. 创建一个main.py文件
# 舵机旋转角度
angle = 0
# 判断舵机正反转
flag = 0
# 用于超出旋转角度范围提示,角度范围0~180
tips = ''
def Servo(servo, angle):
# 计算舵机占空比
d.duty(int(((angle) / 90 + 0.5) / 20 * 1023 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1644
1644











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









