






今天决定来一些不一样的干货,目前本人在研究通过python识别二维图像得到三维数组,然后通过socket将数据发送到unity的c#脚本,将3维模型进行重新建模,从而实现图片转为3d模型的功能,目前还在学习当中。。。。。。。。
当前先做一个小游戏,通过颜色识别得到一些数据发送给c#脚本
首先是python部分
import socket
import cvzone
from cvzone.ColorModule import ColorFinder
import numpy
import cv2
cap = cv2.VideoCapture(0)
cap.set(3, 128)
cap.set(4, 72)
success, img = cap.read()
h, w, _ = img.shape
# 颜色调试器,选择True可以自己调试,当为False时则使用已有的hsvVals
myColorFinder = ColorFinder(False)
hsvVals = {'hmin': 169, 'smin': 18, 'vmin': 58, 'hmax': 177, 'smax': 219, 'vmax': 203}
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
serverAddressPort = ('localhost', 8091)
while True:
success, img = cap.read()
imgColor, mask = myColorFinder.update(img, hsvVals)
imgContour, contours = cvzone.findContours(img, mask)
if contours:
data = contours[0]['center'][0], \
h - contours[0]['center'][1], \
int(contours[0]['area'])
sock.sendto(str.encode(str(data)), serverAddressPort)
imgStack = cvzone.stackImages([img, imgColor, mask, imgContour], 2, 0.5)
cv2.imshow('Image', imgStack)
# 等待用户按键
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头资源
cap.release()
# 关闭所有窗口
cv2.destroyAllWindows()实现原理是通过颜色调试器来获取对象的,可以修改hsvVals的值来自定义获取自己的颜色
c#部分
using UnityEngine;
using System;
using System.Text;
using System.Net;
using System.Net.Sockets;
using System.Threading;
// 通过python以UDP传输协议的形式传输,使得游戏对象能够移动
public class UDPReceive:MonoBehaviour
{
Thread receiveThread;
UdpClient client;
public int port = 8091; // 端口
public bool startRecieving = true;
public bool printToConsole = false;
public string data;
public void Start()
{
receiveThread = new Thread(new ThreadStart(ReceiveData));
receiveThread.IsBackground = true;
receiveThread.Start();
}
private void ReceiveData()
{
client = new UdpClient(port);
while (startRecieving)
{
try
{
IPEndPoint anyIP = new IPEndPoint(IPAddress.Any, 0);
byte[] dataByte = client.Receive(ref anyIP);
data = Encoding.UTF8.GetString(dataByte);
if (printToConsole) { print(data); }
}
catch(Exception e)
{
print(e.ToString());
}
}
}
}最终效果:
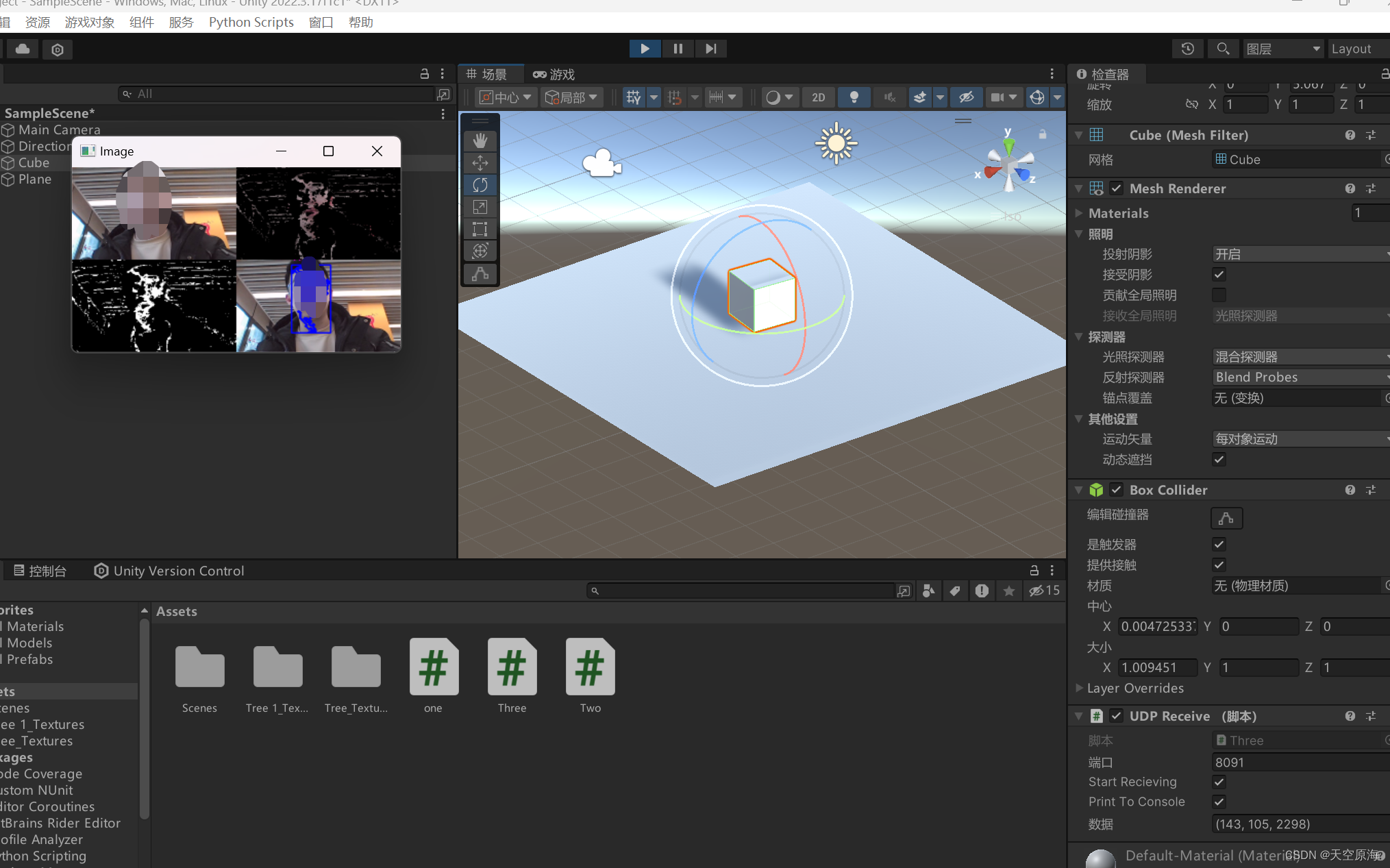
当摄像头中的蓝色框发生移动和改变时,立方体模型中的c#脚本中的数据就会发生改变,也就是右下角那块儿,只需要再改一下c#脚本,就可以实现移动















 1108
1108











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









