






首先为了让cpu不长时间占用,我们利用DMA传送数据。
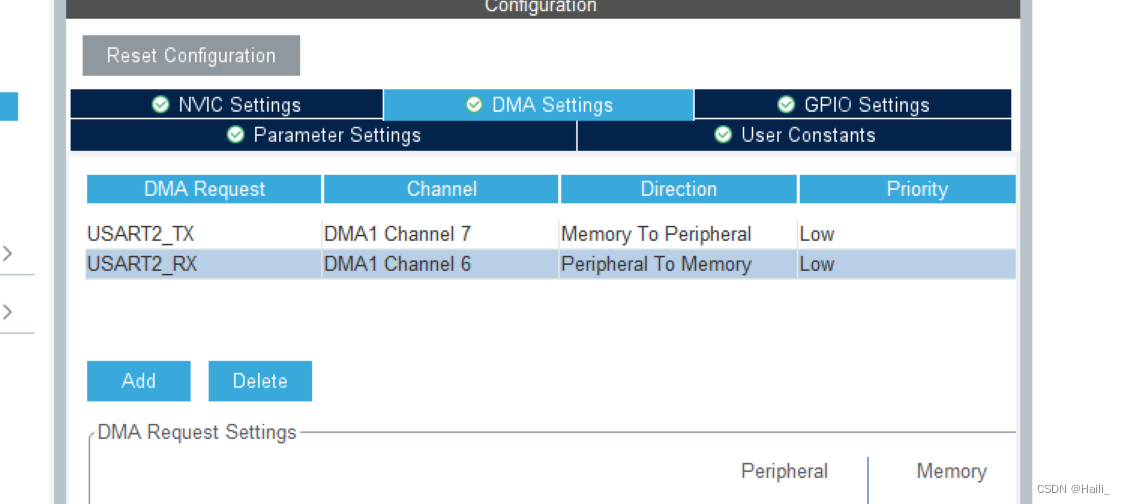 设置USART2的出入DMA通道传输,编辑好这里之后,之前用的
设置USART2的出入DMA通道传输,编辑好这里之后,之前用的
HAL_UART_Transmit和HAL_UART_Receive都要改一下,改成
HAL_UART_Transmit_DMA();
HAL_UART_Receive_DMA();括号里面基本跟前面一样,只是没有了第四个参数:超时时间。
接收不定长函数:
HAL_UARTEx_ReceiveToIdle_DMA()这个函数利用了串口空闲中断,在一串数据传输完成之后再进行分析,意味着不需要知道数据的长度。
这个函数的回调函数:
HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)重新定义这个回调函数:
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size){
if(huart == &huart2){
HAL_UART_Transmit_DMA(&huart2,shuzhu,Size);
HAL_UARTEx_ReceiveToIdle_DMA(&huart2,shuzhu,50);
}当接受到一串数据,先用Size表示此次接收数据的字节长度,
if是检测函数是否是huart2的,然后触发后面两个函数:将数据返回回来,然后在回调函数中重新启动接收。
此时整个流程就走完了
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
HAL_UART_Transmit_DMA(&huart2,shuzhu,7);
HAL_UART_Receive_DMA(&huart2,shuzhu,7);
}
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size){
if(huart == &huart2){
HAL_UART_Transmit_DMA(&huart2,shuzhu,Size);
HAL_UARTEx_ReceiveToIdle_DMA(&huart2,shuzhu,50);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
// char huanhang[] = "back\r\n";
// HAL_UART_Receive_DMA(&huart2,shuzhu,7);
HAL_UARTEx_ReceiveToIdle_DMA(&huart2,shuzhu,50);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// HAL_UART_Transmit(&huart2,(uint8_t*)huanhang,strlen(huanhang),1000);
//HAL_UART_Transmit(&huart2,shuzhu,2,1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Channel6_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel6_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel6_IRQn);
/* DMA1_Channel7_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel7_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel7_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */这一次发送与接收并不在循环中完成,在循环中并不能保证在数据接收完成之后才启用发出,所以回调函数中又重新启动接收,保证下一次循环。
在完成不定长接收后,之前定长接收遇到的在循环中可能出现串口接收发出数据不完整的问题不攻自破,不定长接收十分稳定。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









