









上一篇写了Python OpenCV 的 NMS接口
https://blog.csdn.net/HaoZiHuang/article/details/126460067
这篇咱手动实现一下:
第一步,函数签名设计:和OpenCV的 cv2.dnn.NMSBoxes 要一样
def py_nms(dets, nms_threshold=0.5, score_threshold=0.5):
dets 的shape为(m, 5),前4列为xyxy的坐标,最后一列为置信度conf
所以检测一下输入参数正确性
assert dets.shape[1] == 5
assert len(dets.shape) == 2
先做最简单的一步,把置信度低的过滤掉:
# 先过滤掉置信度低的
conf = dets[:, -1]
conf_bool_idx = (conf > score_threshold)
dets = dets[conf_bool_idx]
接下来将每个位置的xyxy提取出来:
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
(以上5个变量都是1维的)
计算面积并按照置信度排序:
#计算每个检测框的面积,并对目标检测得分进行降序排序
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1]
+1 是因为,bbox覆盖的区域都需要计算
[::-1] 是因为,我们需要置信度从大到小排列
接下来计算最高得分矩形框 与 剩余矩形框的相交区域:
i = order[0] # 取置信度最高的框的索引
计算最高得分矩形框与剩余矩形框的相交区域
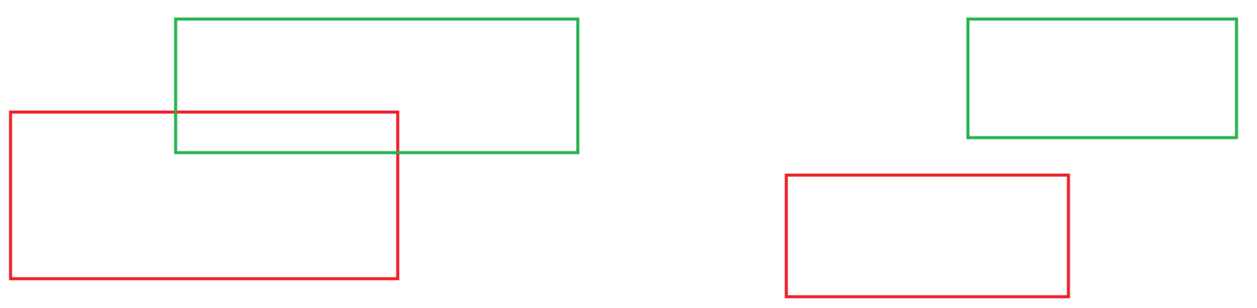
xx1 = np.maximum(x1[i], x1[order[1:]]) # 两个框框左边 的 最右边
yy1 = np.maximum(y1[i], y1[order[1:]]) # 两个框框上边 的 最下边
xx2 = np.minimum(x2[i], x2[order[1:]]) # 两个框框右边 的 最左边
yy2 = np.minimum(y2[i], y2[order[1:]]) # 两个框框下边 的 最上边
np.maximum和np.minimum函数是取两个参数张量(或 int)的 较大值 和 较小值- 用下边这4个图想一下

接下来计算重叠面积:
# 计算相交的面积,不重叠时面积为 0
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
如果没有交集,xx2 - xx1 + 1 < 0 则w直接取0,则交集面积inter=0
注意此时所有的变量,inter、x、y都是张量
接下来直接计算 iou 即可,一般无需担心有除0错误,因为 a r e a > 0 area>0 area>0 且 i n t e r ≤ a r e a s inter \le areas inter≤areas
ovr = inter / (areas[i] + areas[order[1:]] - inter)
接下来价格 大于阈值的过滤掉,也就是保留小于阈值 nms_threshold 的:
inds = np.where(ovr <= nms_threshold)[0]
接下来,更新 order,因为之前已经过滤掉一部分重复的框了,所以直接用 inds 变量索引即可
注意这里索引加了1, 因为ovr数组的长度比order数组的长度少一个,就是因为我们将第一个置信度最高的框已经取走了,第一个框和其余的框计算IoU
order = order[inds + 1]
然后接下来从第一步再去进行循环即可
我们这里不能用 for 循环是因为 order 每次都在变换,所以应当用 while 循环
循环终止的条件就是 order 中已经没有元素了,被 nms 过滤完毕了,所以只要 order.size > 0 循环就应当进行
总结一下,我们的策略是:
- 每次先将置信度高的框的索引放到保留列表里,该列表命名为
keep,然后用该置信度高的框与其它框进行 nms,滤除置信度低的框 - 然后再取当前置信度最高的框,与剩余的框进行 nms, 重复该过程
放上完整代码:
import numpy as np
import cv2
def py_nms(dets, nms_threshold=0.5, score_threshold=0.5):
"""Pure Python NMS baseline."""
# 先过滤掉置信度低的
conf = dets[:, -1]
conf_bool_idx = (conf > score_threshold)
dets = dets[conf_bool_idx]
# tl_x, tl_y, br_x, br_y 及 score
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
#计算每个检测框的面积,并对目标检测得分进行降序排序
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1]
keep = [] #保留框的结果集合
while order.size > 0:
i = order[0]
keep.append(i)
# 计算最高得分矩形框与剩余矩形框的相交区域
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
# 计算相交的面积,不重叠时面积为0
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
#计算IoU:重叠面积 /(面积1+面积2-重叠面积)
ovr = inter / (areas[i] + areas[order[1:]] - inter)
# 保留IoU小于阈值的box
inds = np.where(ovr <= nms_threshold)[0]
order = order[inds + 1] # 注意这里索引加了1,因为ovr数组的长度比order数组的长度少一个
return np.where(conf_bool_idx)[0][keep]
if __name__ == '__main__':
dets = np.array([[100,120,170,200,0.98],
[20,40,80,90,0.99],
[20,38,82,88,0.96],
[200,380,282,488,0.9],
[19,38,75,91, 0.8]])
res = py_nms(dets, 0.5, 0.5)
print(dets[res])
print(res)
# dets_ = np.array(bbox_list)
dets_ = dets
nms_idx = cv2.dnn.NMSBoxes(dets_[:, :-1], dets_[:, -1], 0.5, 0.5)
print(dets_[nms_idx])
print(nms_idx)
看下结果:
[[ 20. 40. 80. 90. 0.99]
[100. 120. 170. 200. 0.98]
[200. 380. 282. 488. 0.9 ]]
[1 0 3]
[[ 20. 40. 80. 90. 0.99]
[100. 120. 170. 200. 0.98]
[200. 380. 282. 488. 0.9 ]]
[1 0 3]
这里说一下:
inds = np.where(ovr <= nms_threshold)[0]
order = order[inds + 1]
如果某一步,把所有的框都nms过滤掉了,则 inds 返回一个空数组
>>> inds
[]
>>> inds.shape
(0,)
这时,inds + 1,空数字加1 会返回什么呢?
>>> inds + 1
[]
空数组加一,依旧是空数组
那空数组去索引order的元素会返回什么呢:
>>> order[inds + 1]
[]
依旧是空数组,这样再检测循环条件时 order.size > 0,该条件为 False,跳出循环,循环结束
只能说 numpy 牛逼!这都考虑到了
最后要说的是 return 语句
return np.where(conf_bool_idx)[0][keep]
由于第一步,先用置信度阈值过滤了
# 先过滤掉置信度低的
conf = dets[:, -1]
conf_bool_idx = (conf > score_threshold)
dets = dets[conf_bool_idx]
所以最终的索引要按照没置信度过滤之前的数组算















 1064
1064











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









