







通过网上很多资料,还有例程的代码,我根据自己的需求写的笔记如下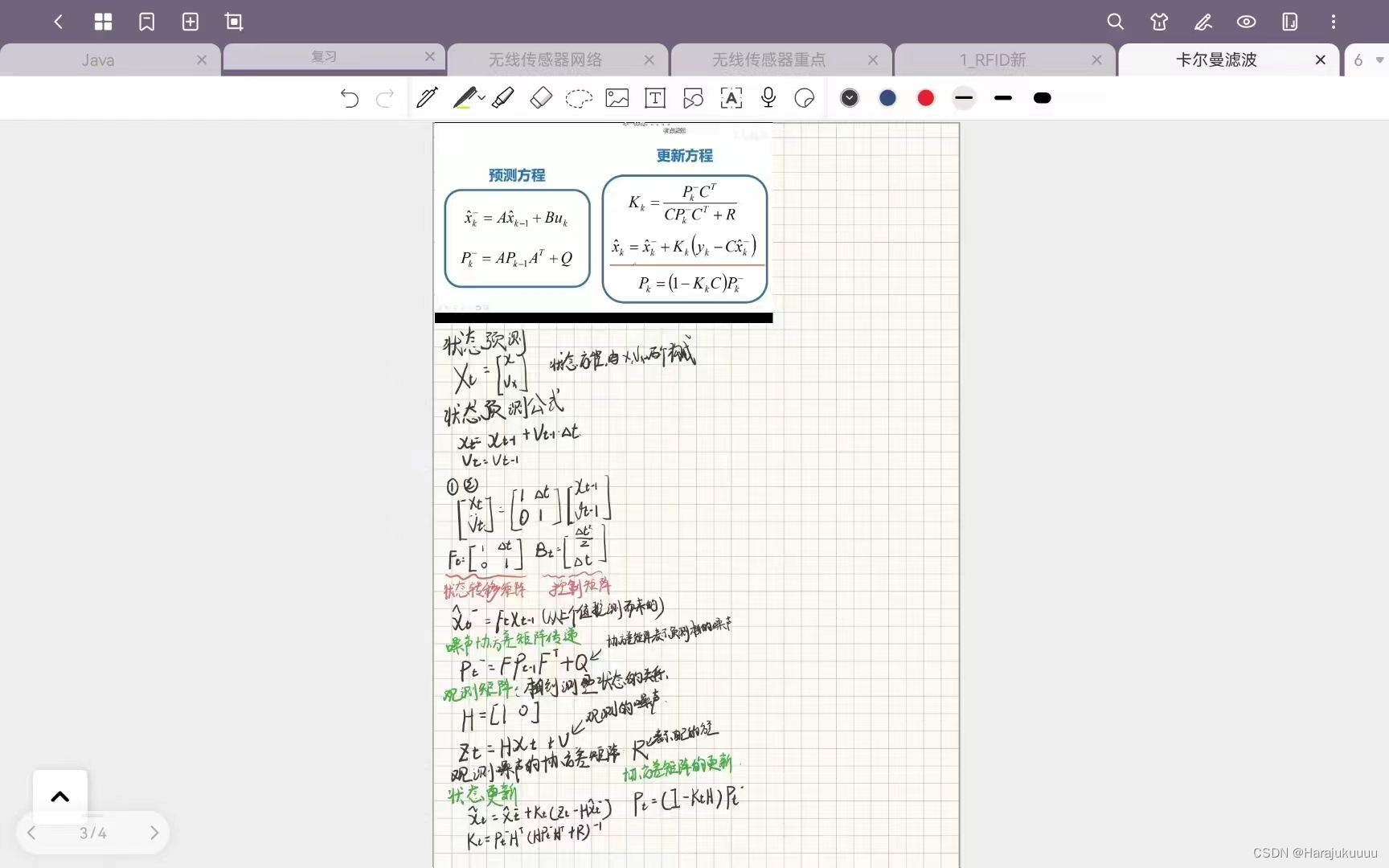
用自己的话来讲,卡尔曼滤波就是找一个权重值,我有一个测量值和一个预测值,测量值就是我通过各种传感器得到的数据,例如速度呀,加速度呀,经纬度这些,这个数据会收到外界干扰,和理论值存在一些偏差,还有一个是预测值,预测值是怎么得到的呢?第一个预测值肯定是自己想的预测的是多少,后面的预测值就要根据不断变化的系数进行修正,这个让他变化的东西就是状态转移方程,一次次的更新我们的预测值.综合以上考虑,我们需要得到一个最终结果,这个值就叫做估计值,估计值等于一定比例的测量值+预测值.我更相信测量值,那我就让测量值占0.7,预测值占0.3,如果一半一半,那就测量值占0.5,预测值也占0.5,我们需要找的就是一个这样最合适的比例.公式还是有很多数学基础知识,建议推导过程把所有不会的都查一遍,这样才能更好的理解五个卡尔曼公式,最终编写代码
我自己编写的代码如下,不过只考虑的X方向上的滤波,Y方向的没有考虑,如法炮制即可
void RasterWindow:: Kalman(std::vector<std::vector<double>> &gpspoints)
{
const double Time = 1; //控制周期1s
MatrixXd A(2,2); // 系数矩阵
A(0, 0) = 1;
A(1, 0) = 0;
A(0, 1) = Time;
A(1, 1) = 1;
MatrixXd H(1,2); //观测矩阵
H(0, 0) = 1;
H(0, 1) = 0;
MatrixXd Q(2, 2);//过程激励噪声协方差,假设系统的噪声向量只存在速度分量上,且速度噪声的方差是一个常量0.01,位移分量上的系统噪声为0
Q(0, 0) = 0;
Q(1, 0) = 0;
Q(0, 1) = 0;
Q(1, 1) = 0.01;
MatrixXd R(1, 1);//观测噪声协方差,测量值只有位移,它的协方差矩阵大小是1*1,就是测量噪声的方差本身。
R(0, 0) = 0.00001;
//变量定义阵,初始值均为零
MatrixXd X_evlt = MatrixXd::Constant(2, 1, 0); //状态预测值
MatrixXd X_pdct = MatrixXd::Constant(2, 1, 0); //状态估计值
MatrixXd Z_meas = MatrixXd::Constant(1, 1, 0); //测量值
MatrixXd X_real(2, 1); //真实值
MatrixXd Pk = MatrixXd::Constant(2, 2, 0); //预测状态与真实状态的协方差矩阵
MatrixXd Pk_p = MatrixXd::Constant(2, 2, 0);//估计状态和真实状态的协方差矩阵
MatrixXd K = MatrixXd::Constant(2, 1, 0); //kalman增益矩阵
MatrixXd tmp(1, 1);
std::vector<MatrixXd> x_evlt, x_pdct, z_meas, pk, pk_p, k,x_real;
for (int i = 1; i < GPSNUM; ++i) {
X_real(0,0)=gpspoints[i-1][0]+gpspoints[i-1][2]*Time*0.00001;
X_real(1,0)=0;
x_real.push_back(X_real);
}
x_evlt.push_back(X_evlt);
x_pdct.push_back(X_pdct);
z_meas.push_back(Z_meas);
pk.push_back(Pk);
pk_p.push_back(Pk_p);
k.push_back(K);
//开始迭代
for (int i = 1; i < GPSNUM-1; i++) {
//预测值
X_pdct = A * x_evlt[i - 1];
x_pdct.push_back(X_pdct);
//预测状态与真实状态的协方差矩阵,Pk'
Pk_p = A * pk[i - 1] * A.transpose() + Q;
pk_p.push_back(Pk_p);
//K:2x1
tmp = H * pk_p[i] * H.transpose() + R;
K = pk_p[i] * H.transpose() * tmp.inverse();
k.push_back(K);
//测量值z
Z_meas = H * x_real[i];
z_meas.push_back(Z_meas);
//估计值
X_evlt = x_pdct[i] + k[i] * (z_meas[i] - H * x_pdct[i]);
x_evlt.push_back(X_evlt);
//估计状态和真实状态的协方差矩阵,Pk
Pk = (MatrixXd::Identity(2, 2) - k[i] * H) * pk_p[i];
pk.push_back(Pk);
}
std::cout << "含噪声测量" << " " << "后验估计" << " " << "真值" << " " << std::endl;
for (int i = 0; i < GPSNUM-1; i++) {
std::cout<<z_meas[i]<<" "<<x_evlt[i](0,0)<<" "<<x_real[i](0,0)<<std::endl;
gpspoints[i][0] = x_evlt[i](0,0);
}
}















 895
895











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









