






使用MATLAB和Simulink的自动驾驶汽车建模acc cacc自适应巡航协同
ID:2830672685982202
一無所有`

自动驾驶汽车是当今科技领域最炙手可热的话题之一。随着技术的不断发展,越来越多的汽车制造商和科技公司投入到自动驾驶汽车的研发与生产中。而在自动驾驶汽车的建模与控制方面,MATLAB和Simulink成为了不可或缺的工具。
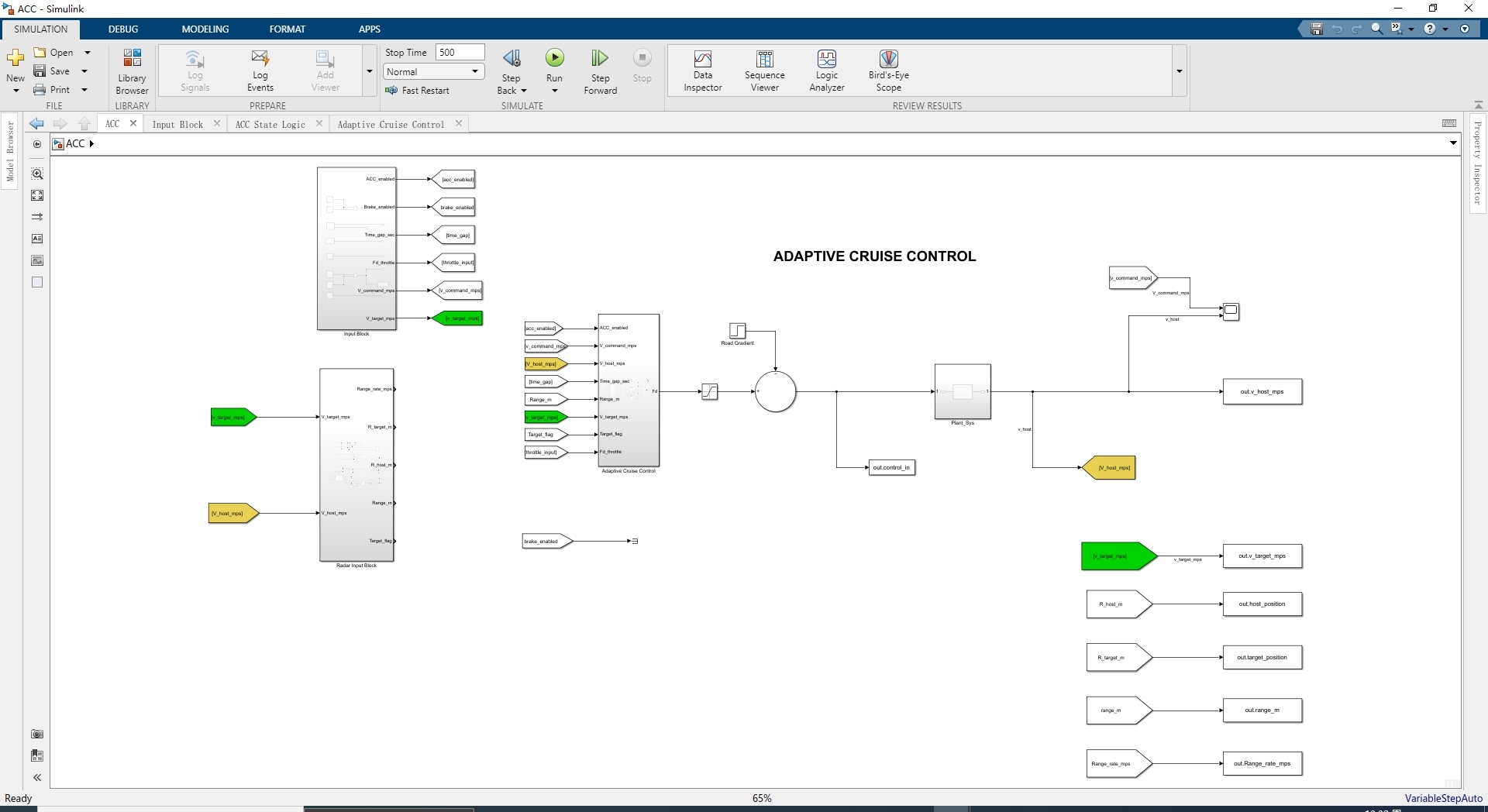
自适应巡航控制(ACC)和自适应巡航协同(CACC)是自动驾驶汽车中的两个重要概念。ACC是一种基于车间距和车速的自动驾驶控制系统,其主要目的是通过调整车速和车辆间距来维持安全驾驶。而CACC则是在ACC的基础上,通过车辆之间的通信和协同,实现更高效的车队行驶。CACC可以使车辆在保持安全的前提下,以更小的车距行驶,从而提高了车队的能力和效率。
在建模和控制自动驾驶汽车时,MATLAB和Simulink提供了丰富的工具和功能,为开发人员提供了便捷的开发环境。使用MATLAB和Simulink,我们可以进行车辆动力学建模、环境感知模块的设计、路径规划与决策、控制器设计和验证等一系列关键任务。
在自动驾驶汽车的建模过程中,车辆动力学模型的准确性对于系统的性能至关重要。MATLAB提供了多种方式来建立车辆动力学模型,如简化模型、物理模型和数据驱动模型等。根据具体需求和可用数据,我们可以选择适合的建模方法,并利用MATLAB的仿真功能验证模型的准确性与性能。
在环境感知模块的设计方面,MATLAB提供了丰富的图像处理和计算机视觉工具包,帮助我们从车载传感器(如摄像头、毫米波雷达等)中获取并分析环境信息。通过对图像进行处理和分析,我们可以实现车辆的目标检测、车道线识别、障碍物检测等功能,为自动驾驶控制系统提供准确的环境感知数据。
路径规划与决策是自动驾驶汽车中的核心任务之一。MATLAB提供了强大的优化和规划工具,可以帮助我们设计高效的路径规划算法和决策策略。通过MATLAB的优化工具箱,我们可以进行路径搜索、障碍物避免和最优路径选择等关键步骤,从而实现安全、高效的自动驾驶。
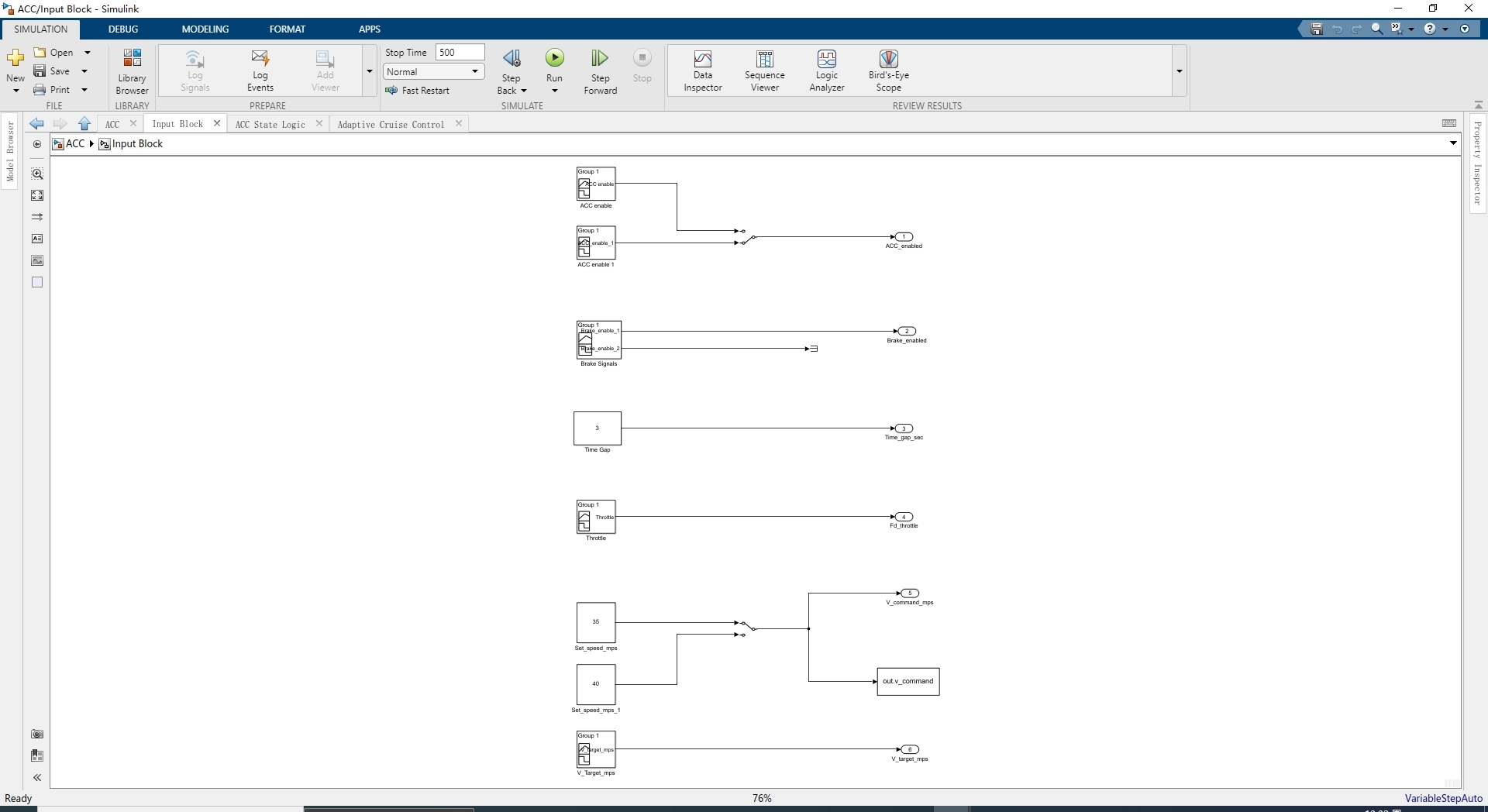
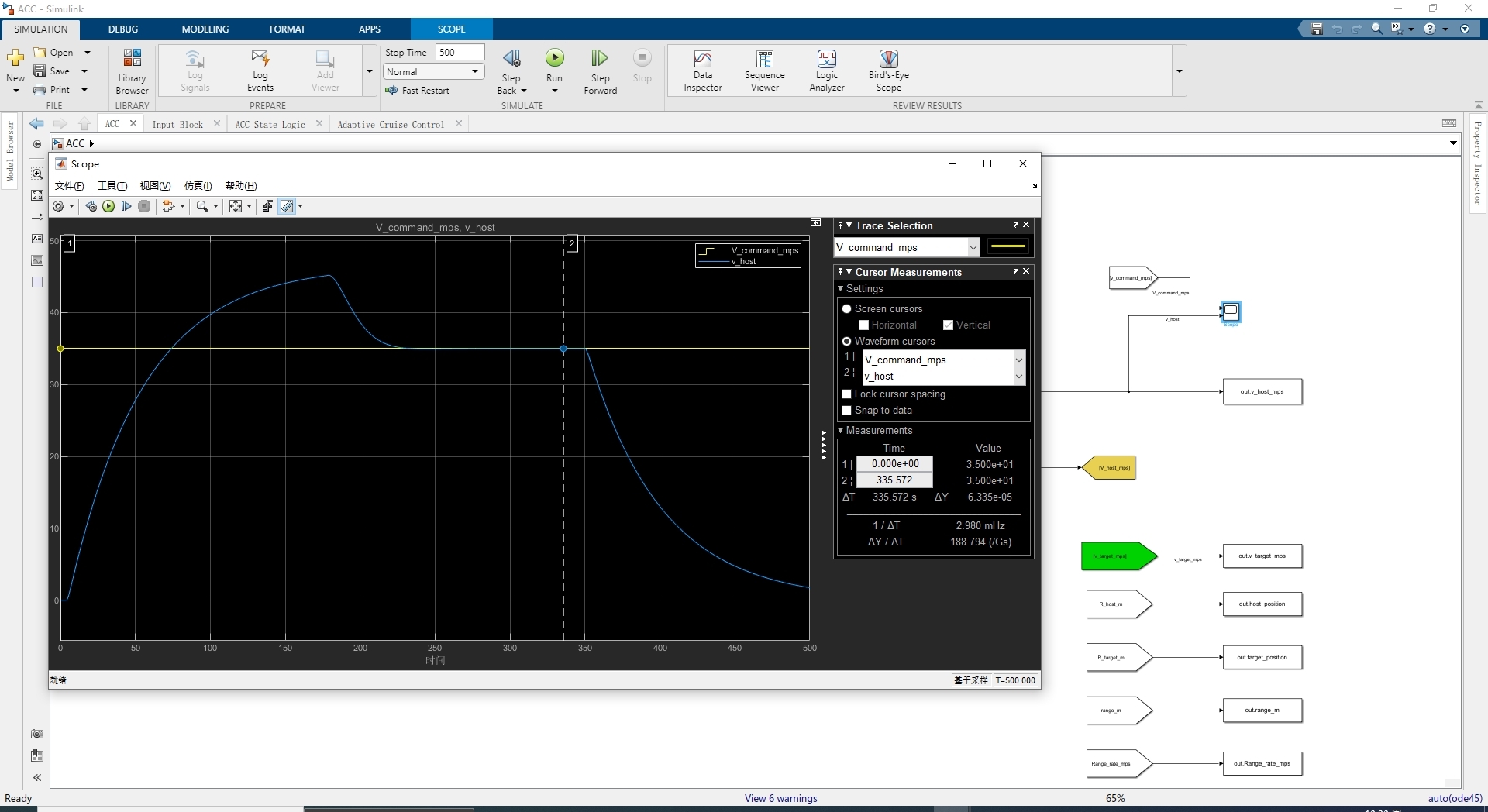
最后,控制器的设计和验证是自动驾驶汽车开发过程中的重要环节。MATLAB和Simulink提供了丰富的控制设计工具和仿真环境,帮助我们设计和验证车辆控制器的性能和安全性。通过MATLAB和Simulink的模型验证工具,我们可以对控制器进行仿真测试,并通过实验数据对其进行调整和优化,以实现更好的控制效果。
综上所述,使用MATLAB和Simulink进行自动驾驶汽车建模和控制是一种高效、可靠的方法。MATLAB和Simulink提供了丰富的工具和功能,帮助开发人员快速构建、测试和优化自动驾驶汽车的各个模块。通过MATLAB和Simulink的应用,我们可以实现自适应巡航控制和巡航协同等关键功能,为自动驾驶汽车的发展和应用提供强有力的支持。
【相关代码 程序地址】: http://nodep.cn/672685982202.html















 467
467











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









