







一、简介
本次调试使用的蓝牙模块,JDY-31 蓝牙基于蓝牙 3.0 SPP 设计,这样可以支持 Windows、Linux、android 数据透传,
工作频段 2.4GHZ,调制方式 GFSK,最大发射功率 8db,最大发射距离 30 米,支持用户通过
AT 命令修改设备名、波特率等指令,方便快捷使用灵活。
JDY-31蓝牙3.0通信协议
二、蓝牙基础知识
- 蓝牙:利用低功率无线电,支持设备短距离通信的无线电技术。特点:短距离、低功率。
- 第一代蓝牙:BR(Basic Rate)技术, 传输速率:721.2kbps。
第二代蓝牙:EDR(Enhanced Data Rate)技术,3Mbps;
第三代蓝牙:核心是AMP(Generic Alternate MAC/PHY),这是一种全新的交替射频技术,支持动态地选择正确射频,传输速率高达24Mbps。
第四代蓝牙:主推Low Energy低功耗,BLE(Bluetooth Low Energy)低功耗功能。
第五代蓝牙:开启物联网时代大门,在低功耗模式下具备更快更远的传输能力。 - 蓝牙协议技术:
BR 和 LE。分类:经典蓝牙和低功耗蓝牙。 - 蓝牙架构: soc蓝牙单芯片方案,可以作为MCU用,一般用于消费类电子,集成度很高。
soc蓝牙 + MCU方案:外设一个单芯片方案,发送自定义的命令达到想要的功能。
蓝牙host + controller 分开方案:Host和Controller分开,集成更多的蓝牙协议,蓝牙电话、蓝牙音频、蓝牙音乐控制等。 - 蓝牙透传模式:从一端输入数据,原封不动的传输到另一端,不需要对数据惊醒复杂的解析或者处理。
三、初始化配置
本次实验采用的是串口1和串口2来进行蓝牙通信,串口1主要用来进行控制台的指令设置,串口2主要是用来连接蓝牙模块。本次使用的是6PIN的蓝牙模块,有使能引脚,可以作用蓝牙模块的启停;有连接状态检测引脚,用来检测连接状态;以及通信和供电引脚,使能和状态检测可以自己视情况增加,本次实验未做增加。
1.串口初始化
按照下面的操作步骤,进行串口的定义以及初始化。

2.硬件连接
按照下面的连接方式连接到单片机对应的引脚上,同时启动电源看到蓝牙模块处于未连接状态,状态指示灯一直闪烁。

3.蓝牙初始化
蓝牙模块的波特率默认是9600,需要通过配置串口2的通信参数,来初始化蓝牙模块。蓝牙模块的参数设置,可以通过控制台指令来进行默认参数的配置,但需要把配置的哈数写成指令
static void Bluetooth_GPIO_Init(void)
{
rt_pin_mode(MODE_SWITCH_PIN, PIN_MODE_OUTPUT);
rt_pin_mode(BLUETOOTH_STATE, PIN_MODE_INPUT);
rt_pin_write(MODE_SWITCH_PIN, PIN_LOW);
}
/**
* @brief 蓝牙模块初始化
*/
static int Bluetooth_Init(void)
{
// 蓝牙模块引脚初始化
Bluetooth_GPIO_Init();
// 查找设备句柄
g_bluetooth.dev = (rt_device_t) rt_device_find(BLUETOOTH_UART_DEV_NAME);
RT_ASSERT(g_bluetooth.dev != RT_NULL);
// 打开设备
rt_err_t ret = rt_device_open(g_bluetooth.dev, RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(ret == RT_EOK);
// 串口初始化
config.baud_rate = BAUD_RATE_9600;
config.data_bits = DATA_BITS_8;
config.parity = PARITY_NONE;
rt_device_control(g_bluetooth.dev, RT_DEVICE_CTRL_CONFIG, (void *)&config);
// 接收回调函数
rt_device_set_rx_indicate(g_bluetooth.dev, Rx_Data_Callback);
// 创建信号量
g_bluetooth.sem = rt_sem_create("rx_sem", 0, RT_IPC_FLAG_PRIO);
// 创建线程
g_bluetooth.thread = rt_thread_create("usart_rx", Bluetooth_Thread_Entry,
&g_bluetooth.dev, 2048, 16, 20);
if (g_bluetooth.thread == RT_NULL)
{
rt_kprintf("thread create fail...\n");
}
else
{
// 启动线程
rt_thread_startup(g_bluetooth.thread);
}
return RT_EOK;
}
4.指令设置参数
通过指令的方式来进行蓝牙模块参数的设置,并且需要注意的是,只有在蓝牙处于断开状态时,才能进行蓝牙模块的参数设置,不然下发的参数只能当做数据发送给蓝牙模块
/**
* @brief 设置蓝牙模块的参数
* @return
*/
int set_bluetooth_argument(int argc, char **argv)
{
char send_buf[20] = {0};
if (argc == 2)
{
if (strcmp(argv[0], "BT") == 0)
{
if (strcmp(argv[1], "DEFAULT") == 0)
{
sprintf(send_buf, "AT+DEFAULT\r\n");
}
else if (strcmp(argv[1], "DISC") == 0)
{
sprintf(send_buf, "AT+DISC\r\n");
}
else if (strcmp(argv[1], "VERSION") == 0)
{
sprintf(send_buf, "AT+VERSION\r\n");
}
}
}
else if (argc == 3)
{
if (strcmp(argv[0], "BT") == 0)
{
if (strcmp(argv[1], "PIN") == 0)
{
sprintf(send_buf, "AT+PIN=%s\r\n", argv[2]);
}
else if (strcmp(argv[1], "NAME") == 0)
{
sprintf(send_buf, "AT+NAME=%s\r\n", argv[2]);
}
}
}
else
{
return -RT_ERROR;
}
Bluetooth_Send_Data((void *)send_buf, strlen(send_buf));
return 0;
}
MSH_CMD_EXPORT_ALIAS(set_bluetooth_argument, BT, Change the Bluetooth connection password);
四、完整代码
1.bluetooth.c :主要是蓝牙模块的所有代码,包括蓝牙模块初始化以及接收数据和发送数据。
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2024-11-22 IBM the first version
*/
#include "bluetooth.h"
/* 初始化串口配置参数 */
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT;
/**
* @brief 蓝牙模块引脚初始化
*/
static void Bluetooth_GPIO_Init(void)
{
rt_pin_mode(MODE_SWITCH_PIN, PIN_MODE_OUTPUT);
rt_pin_mode(BLUETOOTH_STATE, PIN_MODE_INPUT);
rt_pin_write(MODE_SWITCH_PIN, PIN_LOW);
}
/**
* @brief 蓝牙发送数据
* @param buffer:发送的数据
* @param size:数据大小
*/
static void Bluetooth_Send_Data(const void *buffer, rt_size_t size)
{
rt_device_t uart_dev = (rt_device_t) rt_device_find(BLUETOOTH_UART_DEV_NAME);
rt_device_write(uart_dev, 0, buffer, size);
// rt_device_write(g_bluetooth.dev, 0, buffer, size);
}
/**
* @brief 计算字符数组有效长度
* @param buff:数据
* @return 返回长度
*/
int Calc_String_Len(char *buff)
{
int size = 0;
char *p = buff;
while (*p != 0)
{
size++;
p++;
}
return size;
}
/**
* @brief 接收回调函数
* @param size:接收数据的大小
* @return
*/
rt_err_t Rx_Data_Callback(rt_device_t dev, rt_size_t size)
{
g_bluetooth.rx_len = size;
rt_sem_release(g_bluetooth.sem);
return RT_EOK;
}
/**
* @brief 接收线程回调函数
*/
void Bluetooth_Thread_Entry(void *parameter)
{
char buffer[128] = {0};
rt_size_t len = 0;
int size = 0;
bluetooth_t *pBlue = (bluetooth_t *)parameter;
while (1)
{
rt_sem_take(pBlue->sem, RT_WAITING_FOREVER);
len = rt_device_read(pBlue->dev, 0, &buffer, pBlue->rx_len);
buffer[len] = '\0';
size = Calc_String_Len(buffer);
rt_kprintf("%s", buffer);
memset(buffer, 0, len+1);
}
}
/**
* @brief 蓝牙模块初始化
*/
static int Bluetooth_Init(void)
{
// 蓝牙模块引脚初始化
Bluetooth_GPIO_Init();
// 查找设备句柄
g_bluetooth.dev = (rt_device_t) rt_device_find(BLUETOOTH_UART_DEV_NAME);
RT_ASSERT(g_bluetooth.dev != RT_NULL);
// 打开设备
rt_err_t ret = rt_device_open(g_bluetooth.dev, RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(ret == RT_EOK);
// 串口初始化
config.baud_rate = BAUD_RATE_9600;
config.data_bits = DATA_BITS_8;
config.parity = PARITY_NONE;
rt_device_control(g_bluetooth.dev, RT_DEVICE_CTRL_CONFIG, (void *)&config);
// 接收回调函数
rt_device_set_rx_indicate(g_bluetooth.dev, Rx_Data_Callback);
// 创建信号量
g_bluetooth.sem = rt_sem_create("rx_sem", 0, RT_IPC_FLAG_PRIO);
// 创建线程
g_bluetooth.thread = rt_thread_create("usart_rx", Bluetooth_Thread_Entry,
&g_bluetooth.dev, 2048, 16, 20);
if (g_bluetooth.thread == RT_NULL)
{
rt_kprintf("thread create fail...\n");
}
else
{
// 启动线程
rt_thread_startup(g_bluetooth.thread);
}
return RT_EOK;
}
INIT_ENV_EXPORT(Bluetooth_Init);
/**
* @brief 设置蓝牙模块的参数
* @return
*/
int set_bluetooth_argument(int argc, char **argv)
{
char send_buf[20] = {0};
if (argc == 2)
{
if (strcmp(argv[0], "BT") == 0)
{
if (strcmp(argv[1], "DEFAULT") == 0)
{
sprintf(send_buf, "AT+DEFAULT\r\n");
}
else if (strcmp(argv[1], "DISC") == 0)
{
sprintf(send_buf, "AT+DISC\r\n");
}
else if (strcmp(argv[1], "VERSION") == 0)
{
sprintf(send_buf, "AT+VERSION\r\n");
}
}
}
else if (argc == 3)
{
if (strcmp(argv[0], "BT") == 0)
{
if (strcmp(argv[1], "PIN") == 0)
{
sprintf(send_buf, "AT+PIN=%s\r\n", argv[2]);
}
else if (strcmp(argv[1], "NAME") == 0)
{
sprintf(send_buf, "AT+NAME=%s\r\n", argv[2]);
}
}
}
else
{
return -RT_ERROR;
}
Bluetooth_Send_Data((void *)send_buf, strlen(send_buf));
return 0;
}
MSH_CMD_EXPORT_ALIAS(set_bluetooth_argument, BT, Change the Bluetooth connection password);
2.bluetooth.h :主要是蓝牙模块的宏定义
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2024-11-22 IBM the first version
*/
#ifndef APPLICATIONS_BLUETOOTH_H_
#define APPLICATIONS_BLUETOOTH_H_
#include <rtthread.h>
#include <drv_common.h>
#include <string.h>
#include <stdio.h>
#define BLUETOOTH_UART_DEV_NAME "uart2"
#define MODE_SWITCH_PIN GET_PIN(A, 11) // 模式选择引脚
#define BLUETOOTH_STATE GET_PIN(E, 7) // 蓝牙连接状态
#define BLUE_STATE_READ rt_pin_read(BLUETOOTH_STATE) // 蓝牙状态读取
typedef struct
{
rt_device_t dev; // 串口设备
rt_sem_t sem; // 创建信号量
rt_thread_t thread; // 创建线程
rt_size_t rx_len; // 接收数据长度
} bluetooth_t;
bluetooth_t g_bluetooth;
extern int msh_exec(char *cmd, rt_size_t length);
#endif /* APPLICATIONS_BLUETOOTH_H_ */
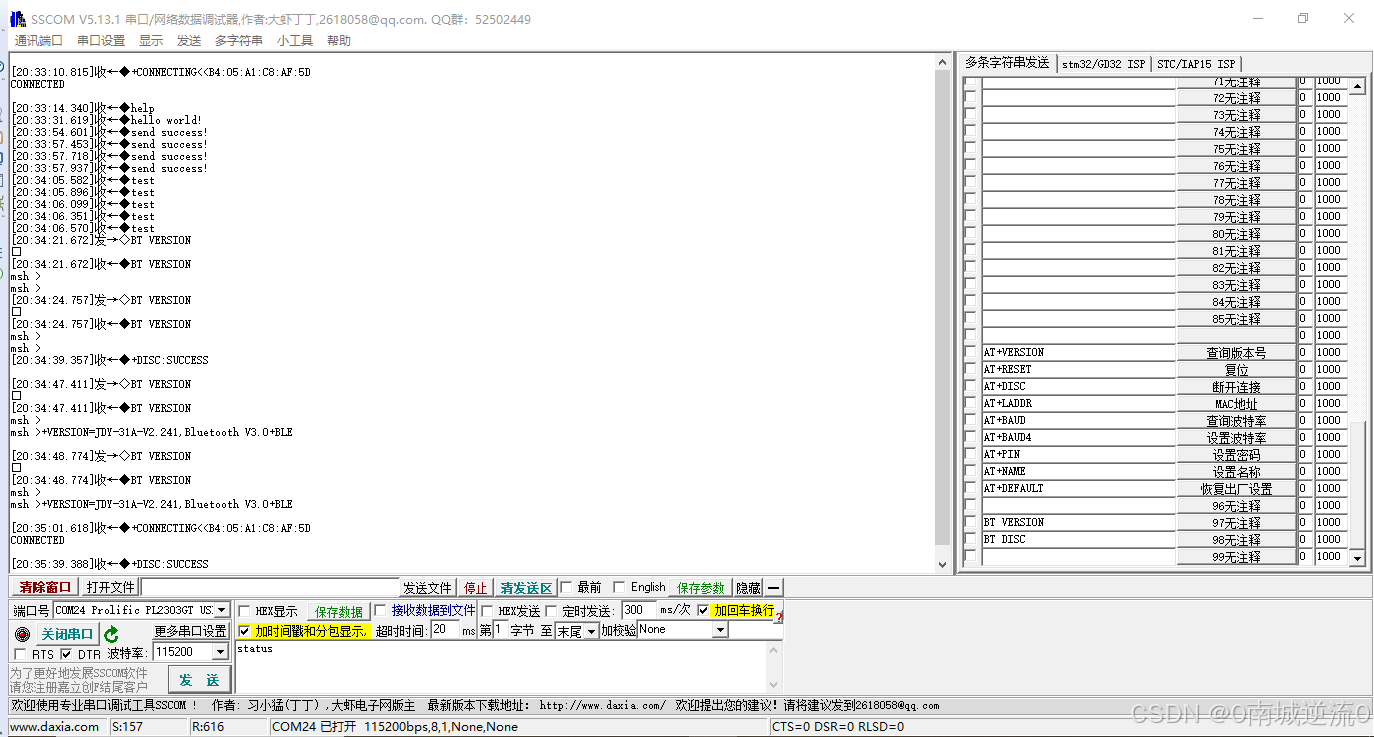
五、测试验证
通过使用手机的蓝牙串口助手,我使用的是HC蓝牙助手,通过蓝牙助手发送指令到控制板,可以对接受和发送的数据进行处理,进行相应的操作。本次测试用助手发送数据,可以在串口助手上面正确接收和发送,测试成功。


















 37万+
37万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









