







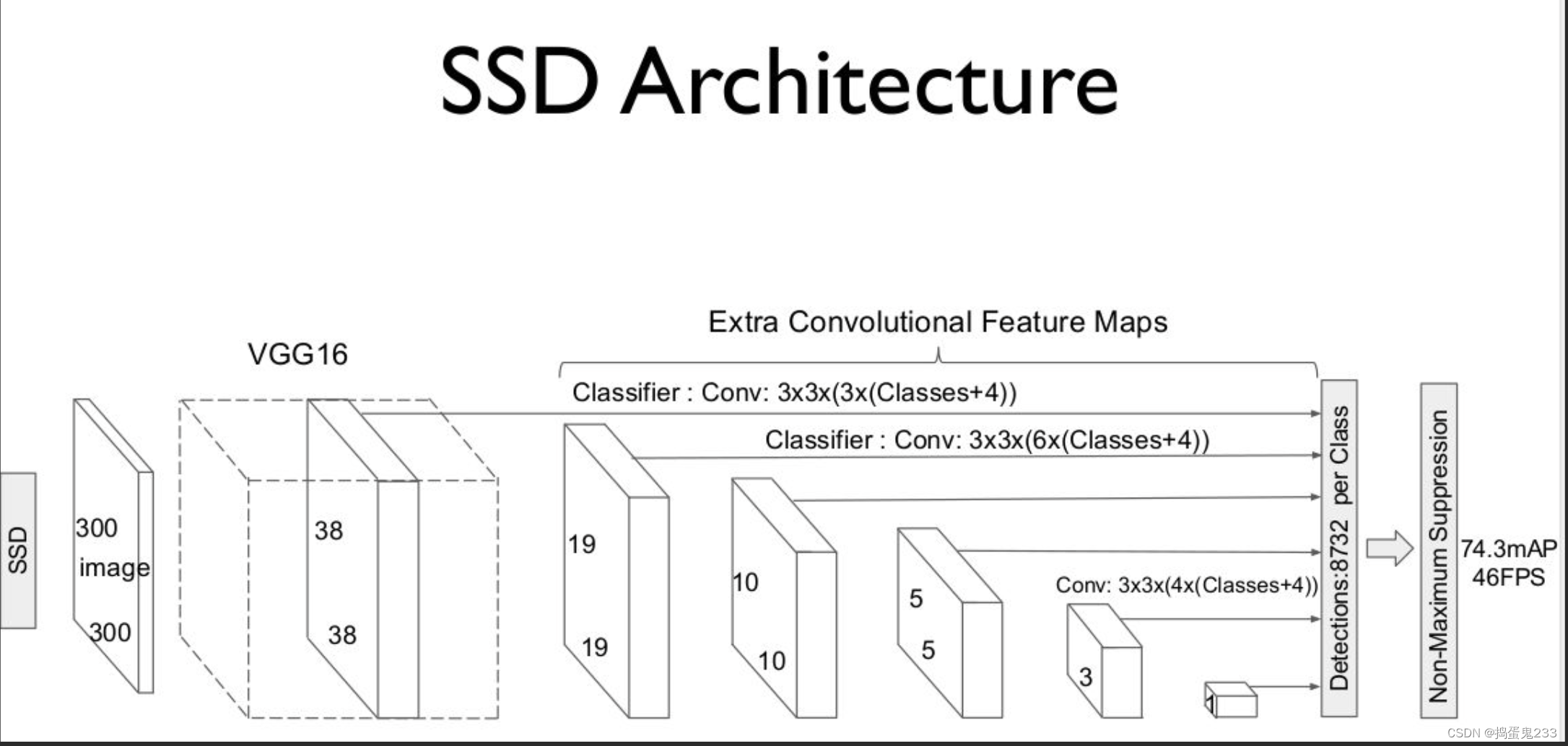
ssd是 one stage形式的多目标检测的网络,在每一层feature map上,对每个用于预测的p通道特征图,SSD的分类器全都使用了
3*3*p*(k*(c+4))卷积进行预测,其中k是每个单元放置的先验框的数量,c是预测的类别数,4是边界框的回归个数。
one stage 的形式是在一个网络中同时进行感兴趣区域的检测与分类,而不是分为两段式。
以yolo v1,v2,v3为代表,ssd。
ssd的结构类型:使用CNN网络输出每一层的feature map,然后对feature map上每一个像素点均生成k个anchors,这些anchors均匀对应着原图像上的一些区域。假设输出的特征图的尺寸为m*n,那么对每个像素点均有k(c+4),其中c是类别数,包括前景与背景类别。而4是锚框的左上角与右下角的坐标。那么对于整个特征图来说,有m*n*k(c+4)个锚框的生成。
其中对于每个锚框使用IOU来进行类别标注与边界框参数标注。
注意IOU阈值提高引发的过拟合的现象,因为阈值的提高使得正样本的数量指数级的下降。
并且在inference的时候,没有正式的标签,那么无法进行IOU的判断,就将所有的锚框当作正样本输入到网络中,那么之前的锚框都是质量好的,这样会使得出现过拟合现象。















 309
309











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









