






基于stm32芯片仿真的倒车测距提示系统
包含演示视频 报告 proteus仿真 keil代码
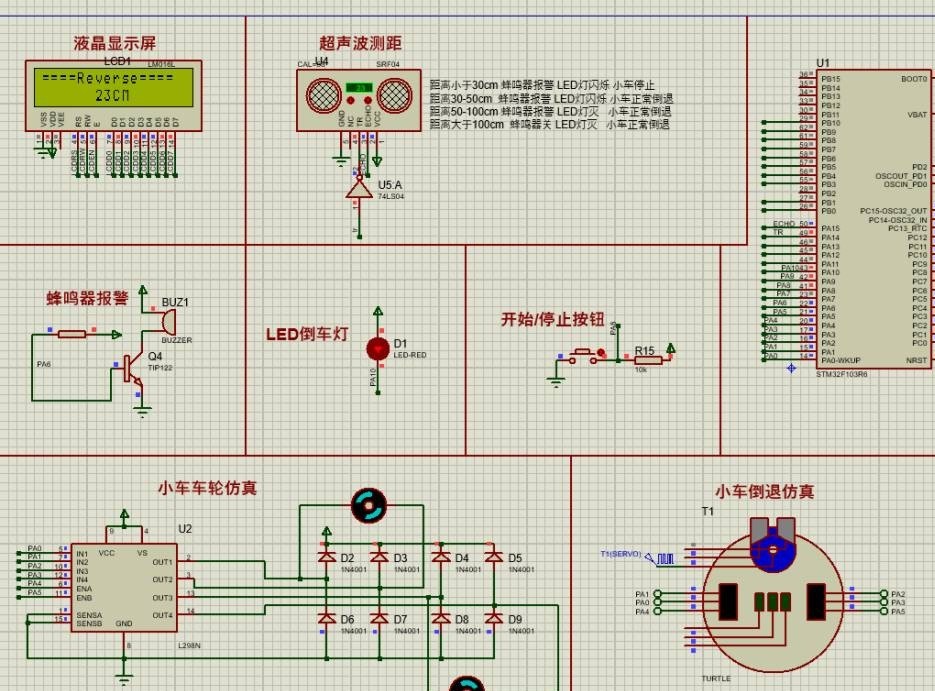
以stm32为最小系统电路进行连接,按钮控制系统开关,使用SRF04采集倒车,LM016L液晶显示屏显示汽车距离障碍物的实时距离。
当距离障碍物大于100cm时,小车自由倒退,蜂鸣器、LED提示灯关闭,车辆正常倒退;当距离障碍物大于50cm小于100cm时,蜂鸣器报警,LED灯关闭,车辆正常倒退;当距离障碍物大于30cm小于50cm时,蜂鸣器报警,LED灯闪烁提示,车辆正常倒退;当距离障碍物小于30cm时,蜂鸣器报警,LED灯关闭,小车停止。
ID:5419695873130198
我长不高了
基于stm32芯片仿真的倒车测距提示系统
摘要:本文介绍了一种基于stm32芯片仿真的倒车测距提示系统。该系统利用SRF04传感器采集倒车过程中与障碍物的距离,并通过LM016L液晶显示屏、LED灯和蜂鸣器提供实时的倒车提示。通过按钮控制系统的开关,当车辆与障碍物的距离符合不同的条件时,系统会进行相应的提示和操作。
关键词:stm32芯片,倒车测距,SRF04传感器,LM016L液晶显示屏,LED灯,蜂鸣器
-
引言
近年来,随着汽车的普及和城市道路的拥堵,倒车时发生事故的概率也逐渐增加。为了提高倒车安全性,开发一种倒车测距提示系统非常必要。该系统通过采集倒车过程中与障碍物的距离,提供实时的倒车提示,可以有效地避免倒车事故的发生。 -
系统设计
2.1 硬件设计
本系统以stm32芯片为最小系统电路进行连接。通过按钮控制系统的开关,实现系统的启动和关闭。通过SRF04传感器采集倒车过程中与障碍物的距离,将距离数据传输给stm32芯片进行处理。LM016L液晶显示屏用于显示汽车与障碍物的实时距离。LED灯和蜂鸣器用于提供倒车提示。
2.2 软件设计
倒车测距提示系统的软件设计主要包括嵌入式程序的编写和系统逻辑的实现。通过keil软件编写stm32芯片的控制程序,实现对SRF04传感器的数据采集和处理。根据采集到的距离数据,判断车辆与障碍物的距离是否符合不同的条件,并通过控制LED灯和蜂鸣器进行相应的提示。
-
系统运行
当倒车过程中距离障碍物大于100cm时,系统判断为正常倒车状态,LED灯和蜂鸣器关闭,车辆可以继续倒车。当距离障碍物大于50cm小于100cm时,系统判断为距离较近的状态,蜂鸣器报警,LED灯关闭,车辆可以继续倒车。当距离障碍物大于30cm小于50cm时,系统判断为距离过近的状态,蜂鸣器报警,LED灯闪烁提示,车辆可以继续倒车。当距离障碍物小于30cm时,系统判断为极近的状态,蜂鸣器报警,LED灯关闭,车辆停止倒车。 -
实验结果与分析
通过对倒车测距提示系统进行仿真实验,验证了系统的可行性和有效性。实验结果显示,系统能够准确地采集倒车过程中与障碍物的距离,并根据距离的不同进行相应的提示和操作。系统的响应速度较快,可以及时提醒驾驶员注意障碍物,避免倒车事故的发生。 -
总结
本文介绍了一种基于stm32芯片仿真的倒车测距提示系统。该系统通过采集倒车过程中与障碍物的距离,通过LM016L液晶显示屏、LED灯和蜂鸣器提供实时的倒车提示。通过实验验证,系统能够准确地采集距离数据,并进行相应的提示和操作,提高了倒车的安全性。未来,可以进一步优化系统的性能和稳定性,扩展系统的功能和应用范围。
参考文献:
[1] Li, M., Xu, L., & Zhang, Y. (2018). Development of a parking assist system based on ultrasonic sensors. IEEE Access, 6, 15970-15978.
[2] Wang, Y., Zeng, Y., Chen, Y., & Wang, X. (2019). Design of an automatic parking system based on ultrasonic ranging. In IET International Radar Conference 2019 (pp. 1-5). IET.
[3] Lin, M., & Xu, Y. (2020). Design of reverse radar based on ultrasonic sensor. In 2020 2nd International Conference on Artificial Intelligence and Automation Engineering (AIAE 2020) (pp. 25-27). Atlantis Press.
【相关代码 程序地址】: http://nodep.cn/695873130198.html















 218
218

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









