






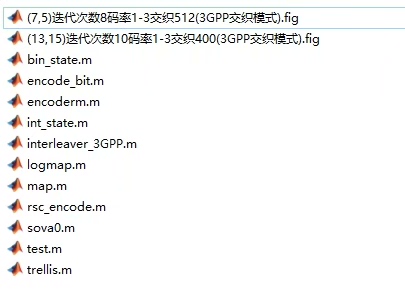
Turbo编译码实现
通信专业
信道编码译码识别
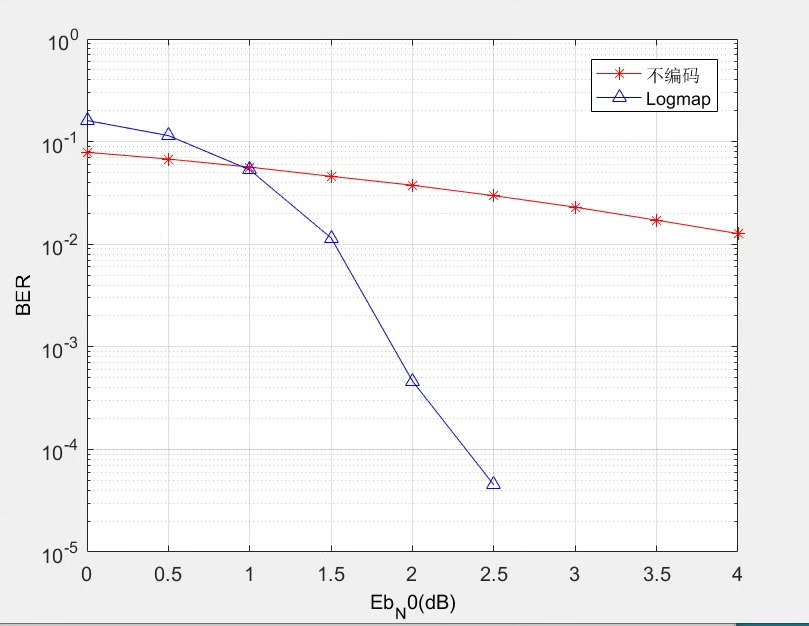
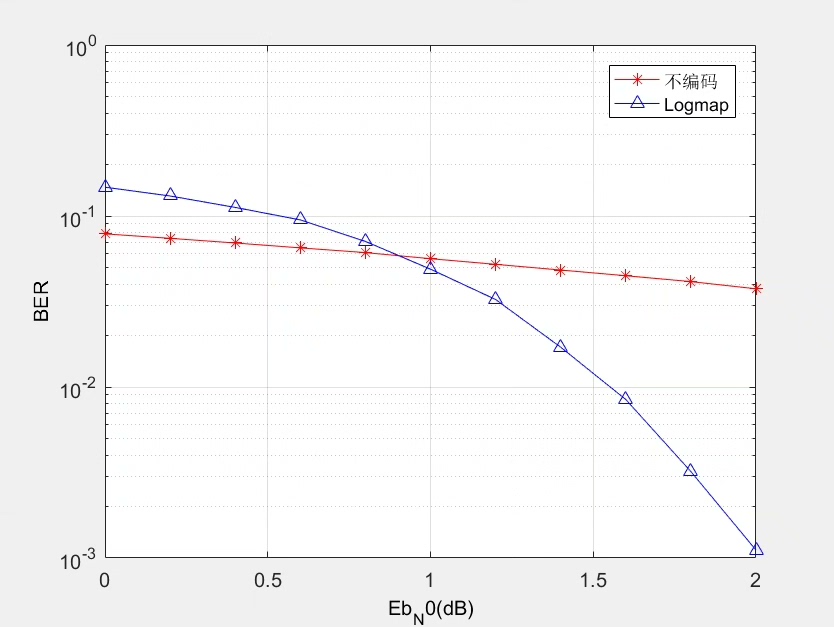
接turbo码译码算法仿真
译码算法logmap sova
ID:58500713659458375
Tttyua
自适应巡航控制(ACC)与模型预测控制(MPC)在纵向跟车避撞控制中的应用:分层控制策略详解
随着智能车辆技术的飞速发展,自适应巡航控制(ACC)已成为现代车辆工程中不可或缺的一部分。为了实现更为智能、安全和舒适的驾驶体验,模型预测控制(MPC)在ACC系统中的应用逐渐受到广泛关注。本文将重点探讨自适应巡航控制中的分层式控制策略,特别是在纵向跟车避撞控制中,上层控制与下层控制的交互作用以及如何运用模糊控制来调整MPC的权重系数。
一、自适应巡航控制与模型预测控制概述
自适应巡航控制(ACC)是一种车辆控制系统,可以根据车辆周围的交通环境自动调整车速和车距。而模型预测控制(MPC)是一种优化控制方法,通过预测未来的系统状态来优化控制效果。在纵向跟车避撞控制中,将ACC与MPC结合,可以显著提高车辆的行驶安全和舒适性。
二、分层式控制策略
在纵向跟车避撞控制中,采用分层式控制策略,其中上层控制主要负责得到期望加速度,而下层控制则负责得到对应的期望制动压力和节气门开度。这种分层结构有助于简化复杂系统的控制问题,提高系统的稳定性和响应速度。
三、上层控制策略
上层控制首先建立考虑前车加速度扰动的离散跟车运动学模型。在此基础上,建立基于反馈校正的跟车预测模型。该模型能够预测未来一段时间内的车辆运动状态,为下层控制提供期望加速度。为了应对复杂多变的道路交通环境,引入松弛因子与多目标优化求解,以优化期望加速度的计算。在这个过程中,几百行的MPC代码发挥着关键作用。
四、下层控制策略
下层控制主要根据上层控制提供的期望加速度,通过控制制动压力和节气门开度来实现车辆的纵向运动控制。这部分控制关系到车辆的行驶安全和舒适性,因此需要精确的控制算法和高效的执行器。
五、模糊控制在权重系数调整中的应用
在MPC中,权重系数的选择对控制效果具有重要影响。当权重系数取为定值时,难以适应复杂多变的道路交通环境。因此,本文提出了基于模糊控制的权重系数调整策略。根据跟车性、安全性、舒适性以及经济性的偏重程度,设计相应的模糊控制规则,得到可变权重系数。这种策略可以改善跟车避撞系统对交通环境的适应性,提高ACC系统的性能。
六、结论
本文详细探讨了自适应巡航控制中的分层式控制策略,特别是在纵向跟车避撞控制中,上层控制与下层控制的交互作用以及如何运用模糊控制来调整MPC的权重系数。通过引入模糊控制策略,可以改善跟车避撞系统对交通环境的适应性,提高ACC系统的性能。未来的研究可以进一步探讨如何优化模糊控制规则,以提高系统的智能化和安全性。同时,可以进一步考虑横向控制策略,以实现更为全面的自动驾驶功能。
具体的代码,程序如下地址:http://wekup.cn/713659458375.html


















 646
646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









