






直流电机,传递函数,模糊控制pid算法,matlab代码
本文主要讨论直流电机控制技术中的模糊PID算法,包括其基本思想、实现方法以及MATLAB代码的实现。
直流电机作为传动系统中常用的元件,其控制技术一直是研究的热点之一。传统的控制方法主要是基于PID控制算法,然而在实际应用中会遇到各种复杂的控制问题,如非线性、时变、鲁棒性等。为了解决这些问题,模糊控制算法应运而生。
模糊控制算法的基本思想是将模糊逻辑运用于控制系统中,通过将输入、输出及控制量与其对应的模糊量相对应,来实现控制的目的。在模糊控制中,模糊化输入、模糊化输出、模糊化规则以及解模糊化运算是其核心步骤。其中模糊化输入与输出主要是通过membership function实现,模糊化规则则是通过if-then规则实现,而解模糊化则是通过defuzzification实现的。
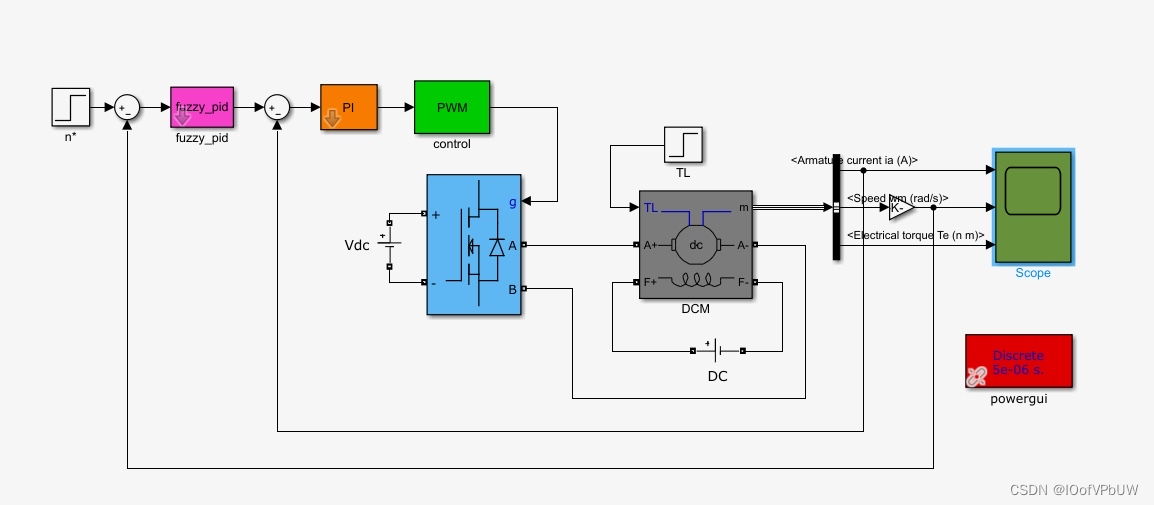
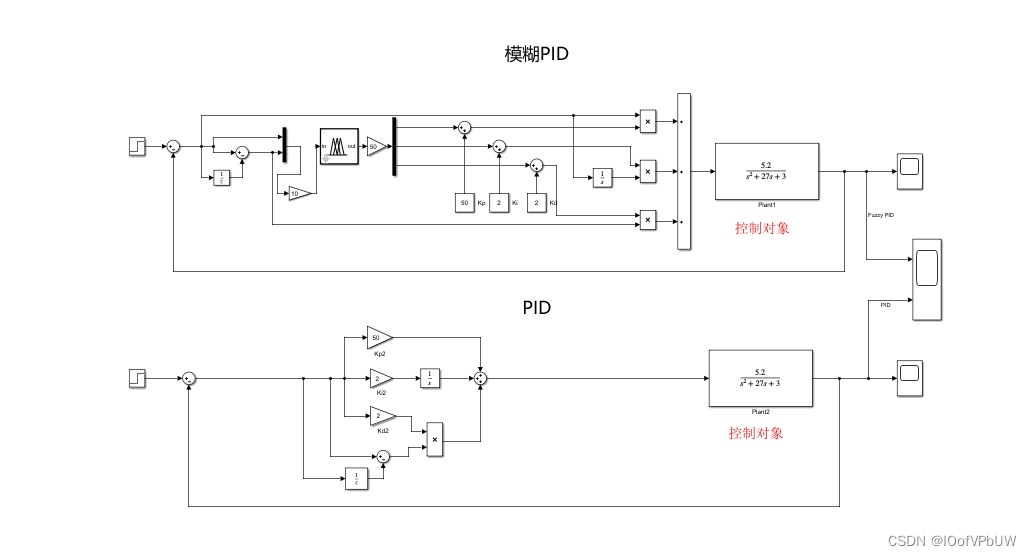
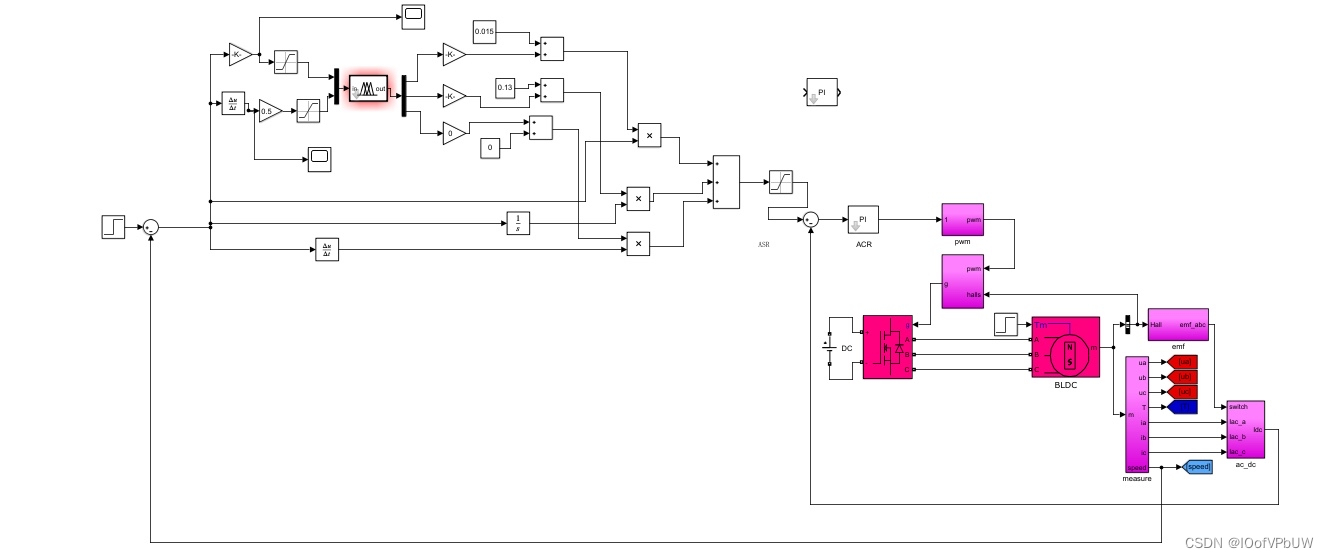
在直流电机控制中,模糊PID算法通常被用于控制系统中的非线性、时变、鲁棒性等问题。其实现方法主要是通过将PID中的参数进行模糊化处理,从而实现模糊PID控制。具体来说,就是将PID中的比例、积分、微分三个调节系数都用模糊量来进行替换,从而得到模糊PID控制器,然后再通过解模糊化运算来得到最终的控制量。
在MATLAB中实现模糊PID算法非常简单,只需要在Fuzzy Logic Toolbox中选择相应的输入输出模糊化函数、规则库以及解模糊化函数,就可以方便地实现模糊控制。下面是一个简单的MATLAB代码实现示例:
% 定义模糊逻辑系统
fis = newfis('DC_motor_fuzzy');
% 定义输入变量
fis = addvar(fis,'input','error',[-10 10]);
fis = addvar(fis,'input','derror',[-10 10]);
% 定义输出变量
fis = addvar(fis,'output','control',[-100 100]);
% 定义模糊化函数
fis = addmf(fis,'input',1,'negative','gaussmf',[1.5 -10]);
fis = addmf(fis,'input',1,'zero','gaussmf',[1.5 0]);
fis = addmf(fis,'input',1,'positive','gaussmf',[1.5 10]);
fis = addmf(fis,'input',2,'negative','gaussmf',[1.5 -10]);
fis = addmf(fis,'input',2,'zero','gaussmf',[1.5 0]);
fis = addmf(fis,'input',2,'positive','gaussmf',[1.5 10]);
fis = addmf(fis,'output',1,'negative','gaussmf',[1.5 -100]);
fis = addmf(fis,'output',1,'zero','gaussmf',[1.5 0]);
fis = addmf(fis,'output',1,'positive','gaussmf',[1.5 100]);
% 定义规则库
rule1 = [1 1 1 1]; % e=n,p=d => c=n
rule2 = [1 2 1 1]; % e=n,d=z => c=n
rule3 = [1 3 1 1]; % e=n,d=p => c=z
rule4 = [2 1 1 1]; % e=z,n=d => c=n
rule5 = [2 2 1 1]; % e=z,d=z => c=z
rule6 = [2 3 1 1]; % e=z,d=p => c=p
rule7 = [3 1 1 1]; % e=p,n=d => c=z
rule8 = [3 2 1 1]; % e=p,d=z => c=p
rule9 = [3 3 1 1]; % e=p,d=p => c=p
fis = addrule(fis,[rule1;rule2;rule3;rule4;rule5;rule6;rule7;rule8;rule9]);
% 定义解模糊化函数
fis.defuzzMethod = 'centroid';
% 运行模糊逻辑系统
out = evalfis([error derror],fis);
% 输出控制量
control = out(1);
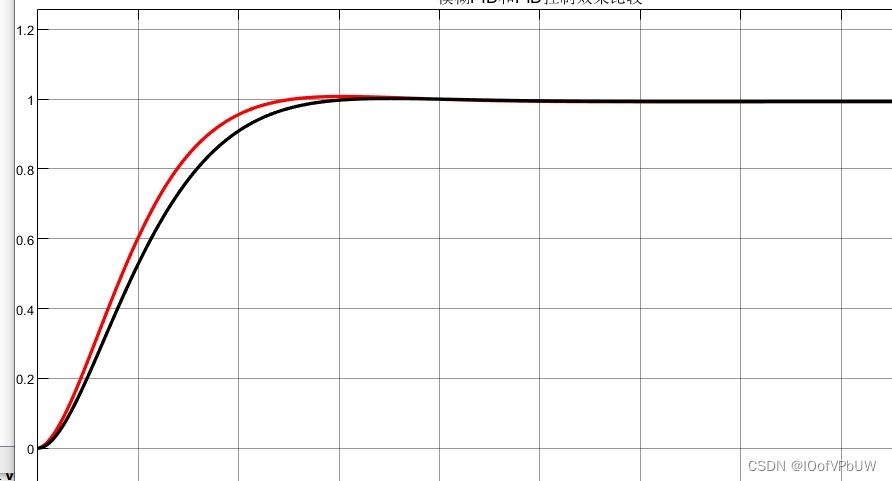
综上所述,模糊PID算法作为直流电机控制技术中常用的方法,其良好的性能和可靠性受到越来越多的关注。在实际应用中,通过MATLAB等工具的支持,可以方便地实现该算法,并取得良好的控制效果。
相关代码,程序地址:http://lanzouw.top/674483342194.html















 4022
4022











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









