




本文适用于瑞芯微RK3562、RK3566、RK3568、RK3576、RK3588等Arm64位SoC,适配开发ROS2系统。各型号触觉智能均有配套核心板及开发板,实现了百分百全国产。
ROS2的具体版本
-
版本说明
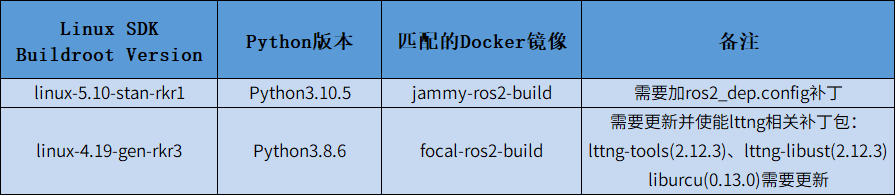
Rockchip Linux SDK基于Buildroot系统构建, 并持续在更新升级工具链、软件包到较新的版本。 因此最新的SDK在编译ROS2时,可能会遇到一些小的错误,建议将版本固定。ROS2发行版本号如下(下载链接可通过截图转文字获取):

已经编译通过的RK Linux SDK版本:
Docker编译
-
补丁、Docker 镜像、源码下载
https://console.zbox.filez.com/l/iJBMWZ
tree.├── docker-focal-python38│ └── rosdep.Dockerfile # 制作Docker Image的Dockerfile├── docker-jammy-python310│ └── rosdep.Dockerfile # 制作Docker Image的Dockerfile├── focal-ros2-build.tar.gz # 根据Dockerfile制作好的Docker Image├── jammy-ros2-build.tar.gz # 根据Dockerfile制作好的Docker Image├── linux-sdk-patches│ └── buildroot # RK Linux SDK不同发布版本有可能会缺少的补丁│ ├── 0001-package-add-libasio.patch│ └── 0002-configs-rockchip-add-ros2-build-dependencies.patch├── MD5SUM.txt # 各压缩包的MD5SUM检验码├── ros2-build-scripts.tar.gz # 编译脚本及补丁└── ros2-sources.tar.gz # ROS2及其部分依赖库的源码包
在RK Linux SDK的Buildroot目录中,检查是否存在ros2_dep.config文件
ls buildroot/configs/rockchip/ros2_dep.configbuildroot/configs/rockchip/ros2_dep.config# 如该ros2_dep.config中缺少:LTTNG_TOOLS,手动加上(ROS2 iron有依赖)tail -f buildroot/configs/rockchip/ros2_dep.config# Required by ros2-iron tracetools; With LTTNG foxy/galactic/humble will buildtracetools too.BR2_PACKAGE_LTTNG_TOOLS=yBR2_PACKA
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















&spm=1001.2101.3001.5002&articleId=149099582&d=1&t=3&u=778aacbee91540d9ae7d528d812ea2e1)
 646
646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











