







自动驾驶车辆运动控制过程中,对PID控制参数的优化和整定。
传统PID控制算法,由于参数固定,在道路曲率较大和车速变化情况下难以满足控制需求,采用RL强化学习算法(DDPG算法,Actor-Critic框架)可实现控制参数的在线优化,科研就是这么有趣,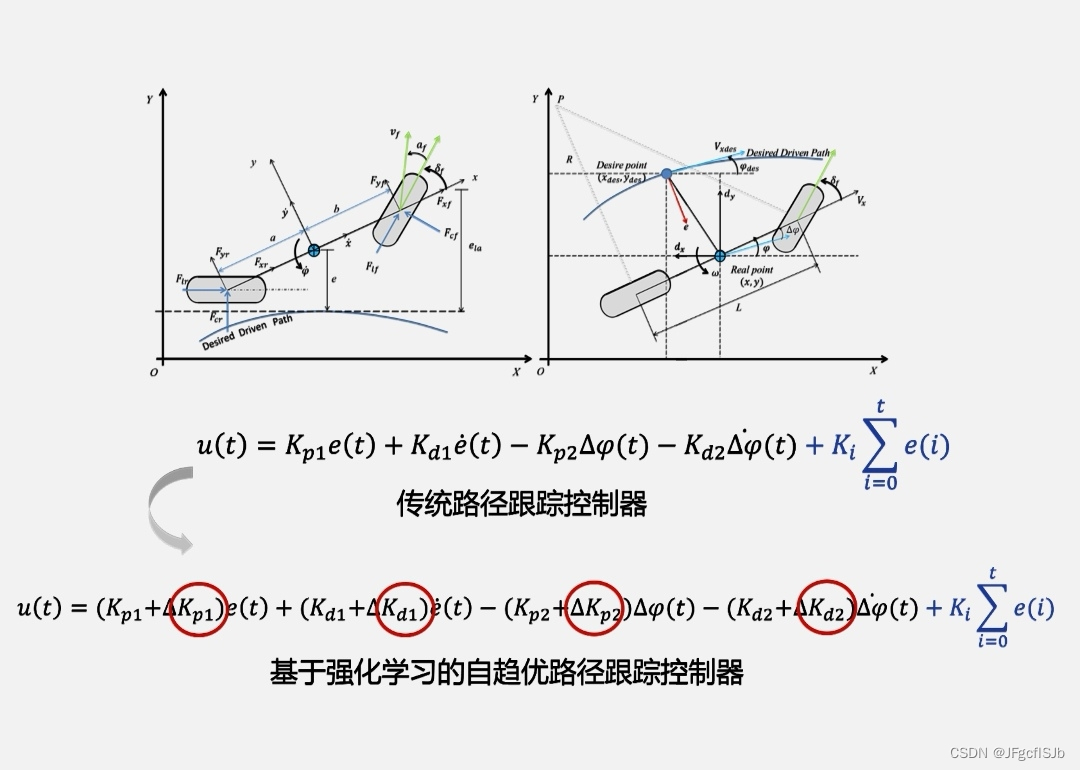
自动驾驶车辆运动控制中的PID控制参数优化与整定
引言
随着科技的不断发展,自动驾驶技术成为了研究的热点之一。在自动驾驶车辆的运动控制过程中,PID控制参数的优化和整定对于提高车辆的操控性能和行驶安全性具有重要意义。传统的PID控制算法存在一定的局限性,对于道路曲率较大和车速变化的情况,难以满足控制需求。近年来,采用强化学习算法成为了优化PID控制参数的一种有效手段。本文将围绕自动驾驶车辆运动控制中的PID控制参数优化与整定进行深入探讨。
PID控制算法的基本原理
PID控制算法是一种经典的控制算法,它由比例(P)、积分(I)和微分(D)三个环节组成。PID控制器通过对误差信号进行比例、积分和微分处理,得到控制输出,以实现对被控对象的精确控制。在自动驾驶车辆的运动控制中,PID控制算法用于调节车辆的速度、方向和轨迹等。
传统PID控制算法的局限性
然而,传统的PID控制算法存在一定的局限性。由于其参数固定,对于道路曲率较大和车速变化的情况,难以满足控制需求。在复杂环境下,车辆的动态特性会发生变化,传统PID控制算法难以自适应地调整控制参数,从而导致控制精度下降。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 151
151











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









