






2自由度机械臂轨迹跟踪控制,6自由度机械臂轨迹跟踪控制,基于强化学习DDPG的机械臂轨迹跟踪,控制算法,强化学习算法,将强化学习DDPG作为机械臂的轨迹跟踪控制器,simulink仿真。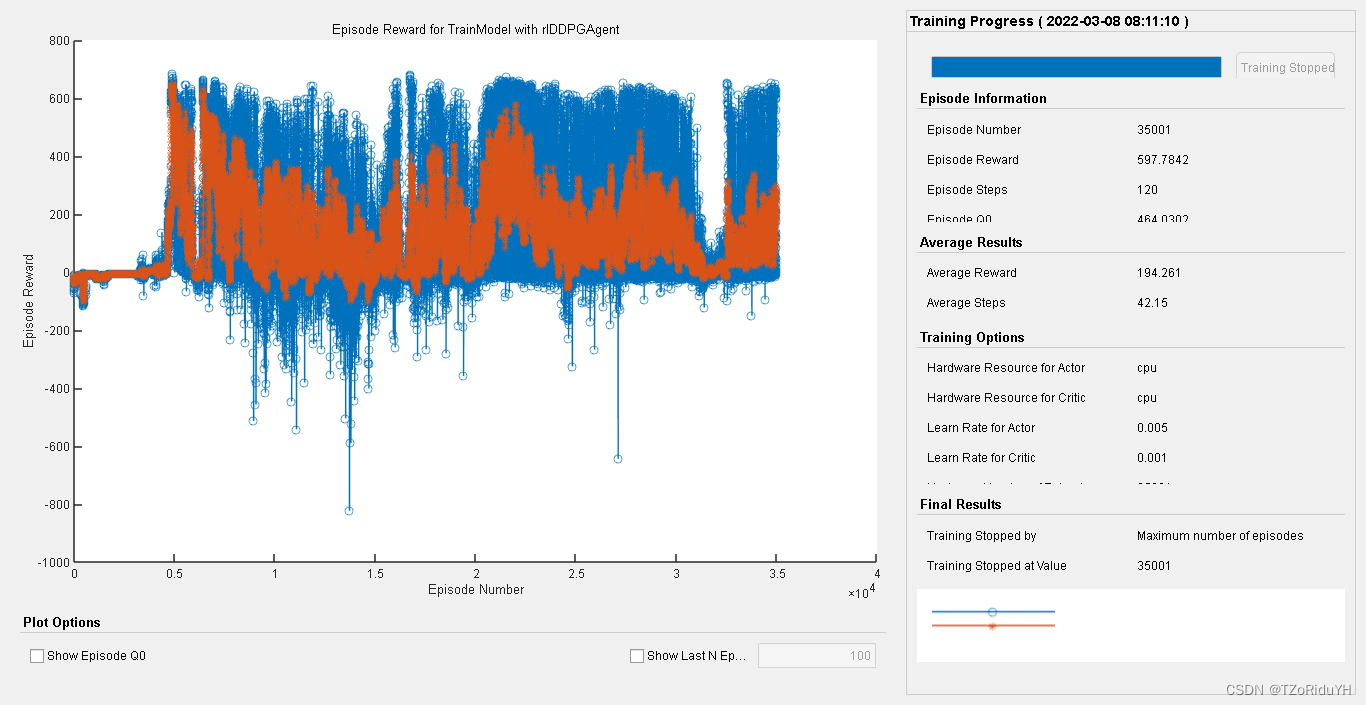

本文将探讨机器人领域中的一个重要主题——机械臂轨迹跟踪控制。机械臂,作为工业生产中的重要设备,广泛应用于制造业、物流业等领域,如何实现机械臂的精确控制是机器人学术界和工业界一直在研究的难题。本文将着重探讨2自由度机械臂轨迹跟踪控制、6自由度机械臂轨迹跟踪控制以及基于强化学习DDPG的机械臂轨迹跟踪控制算法。
首先,我们先了解一下什么是机械臂轨迹跟踪控制。机械臂轨迹跟踪控制指的是让机械臂按照给定的轨迹进行精确控制,使得机械臂的末端可以准确到达目标位置或者运行到指定路线上。在工业生产中,机械臂轨迹跟踪控制的准确性和精度非常关键,因为一旦机械臂无法准确到达目标位置或者路线,将直接影响到生产效率和产品质量。
在机械臂轨迹跟踪控制中,2自由度机械臂和6自由度机械臂是两种常见的机械臂类型。2自由度机械臂由两个旋转关节组成,可以在一个平面内进行运动。而6自由度机械臂由六个旋转关节组成,可以在三维空间内进行运动。不同类型的机械臂需要采用不同的控制算法,以实现精确的轨迹跟踪控制。
传统的机械臂控制算法主要基于PID控制器,需要根据机械臂的动态特性设计合适的PID参数,以实现机械臂的轨迹跟踪控制。但是,这种方法需要进行大量的参数调节和手动参数调整,难以实现自适应控制和在线控制。因此,近年来,一种新型的方法——强化学习DDPG被引入到机械臂轨迹跟踪控制中。
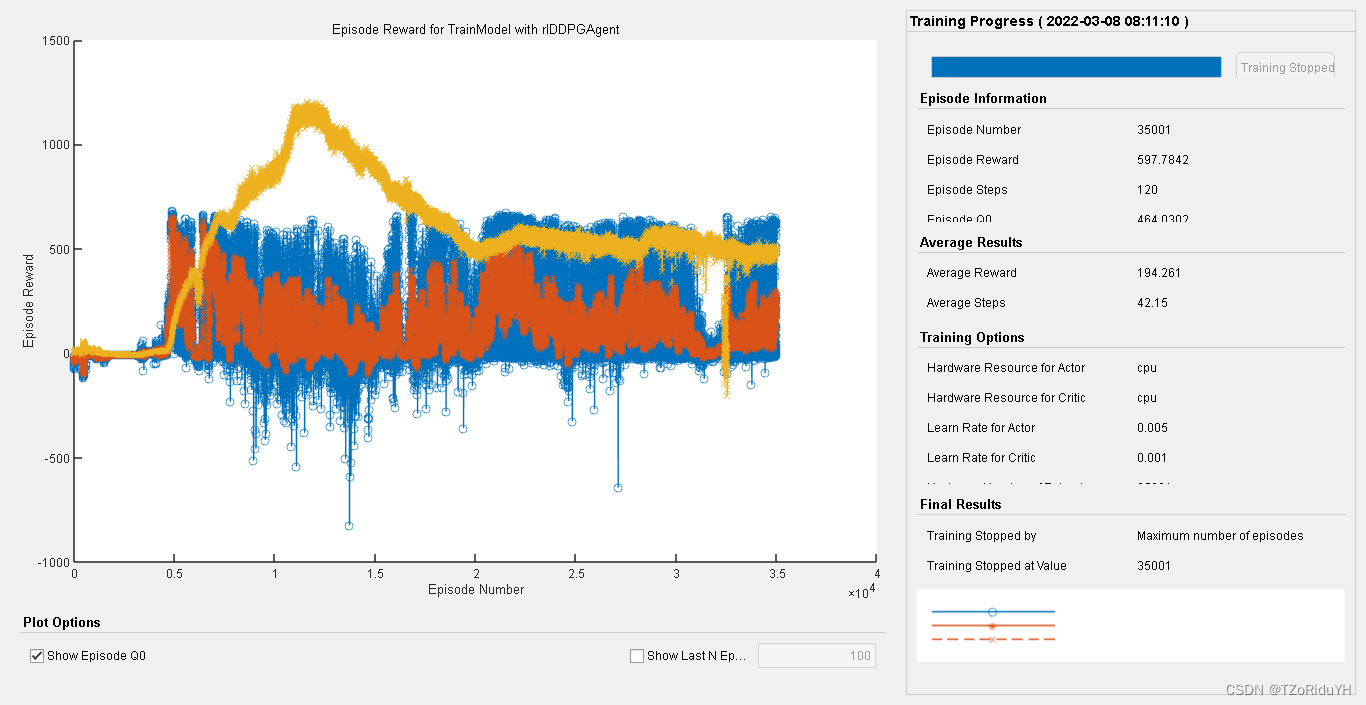
强化学习是一种通过环境交互学习最优行为的算法,DDPG是一种基于深度学习的强化学习算法。将强化学习DDPG作为机械臂的轨迹跟踪控制器,可以通过机器自主学习,实现更加自适应、智能化的轨迹跟踪控制。
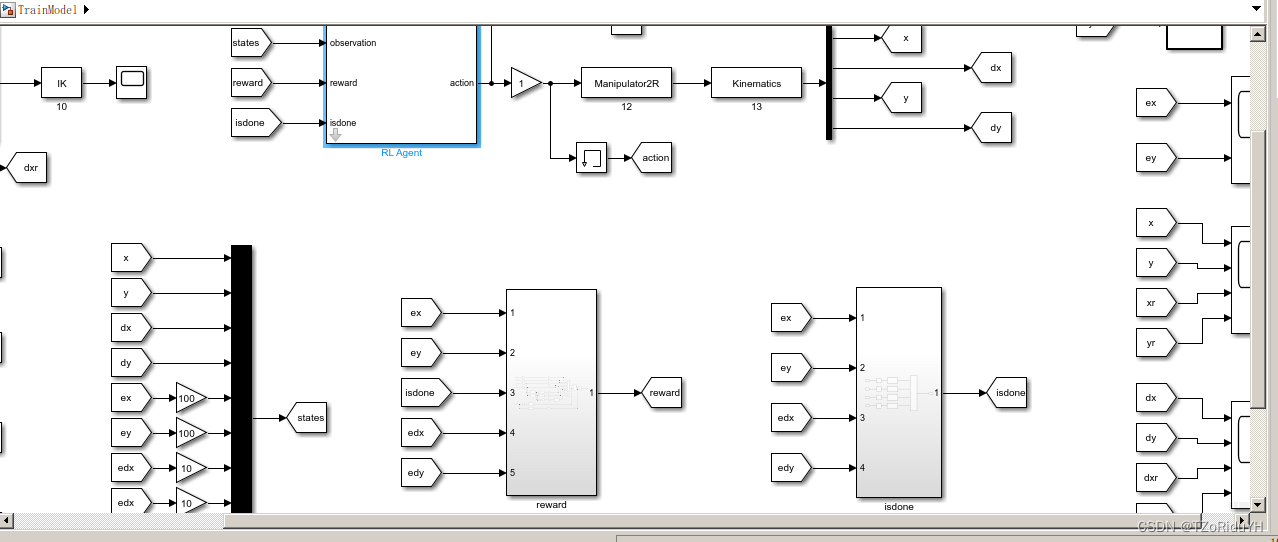
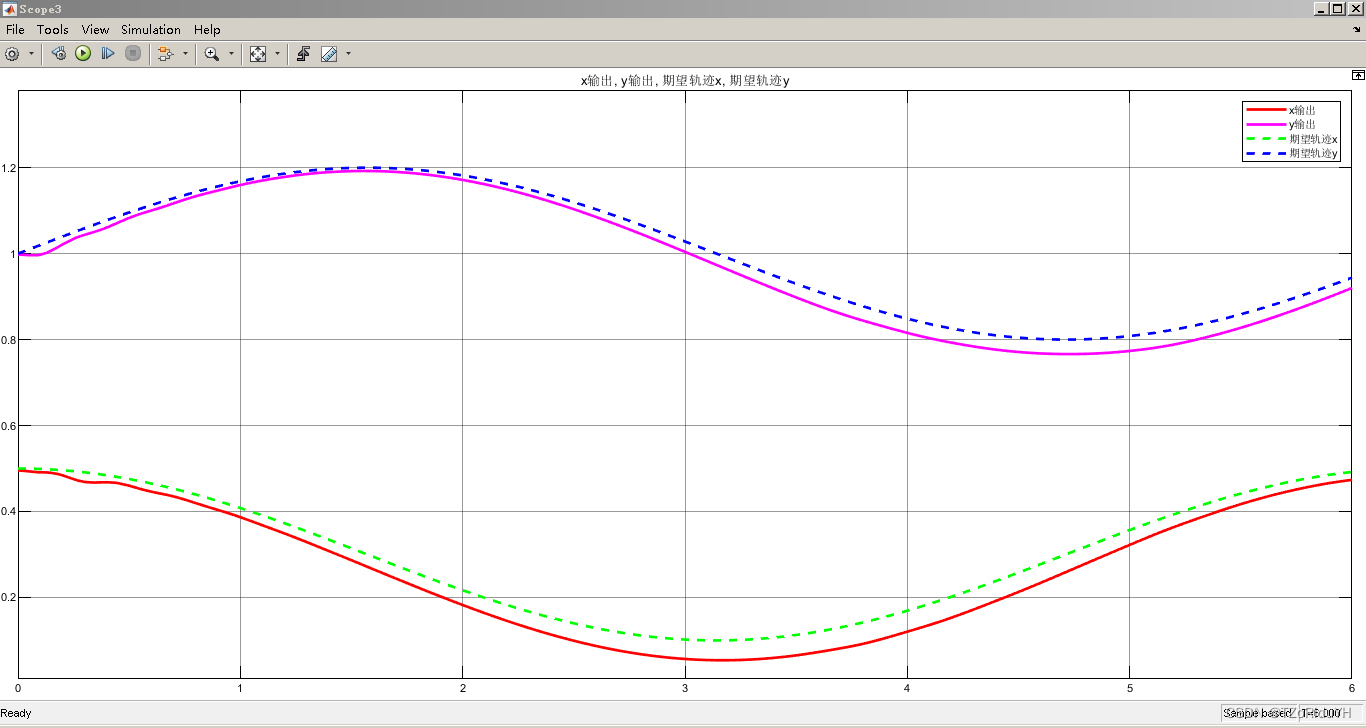
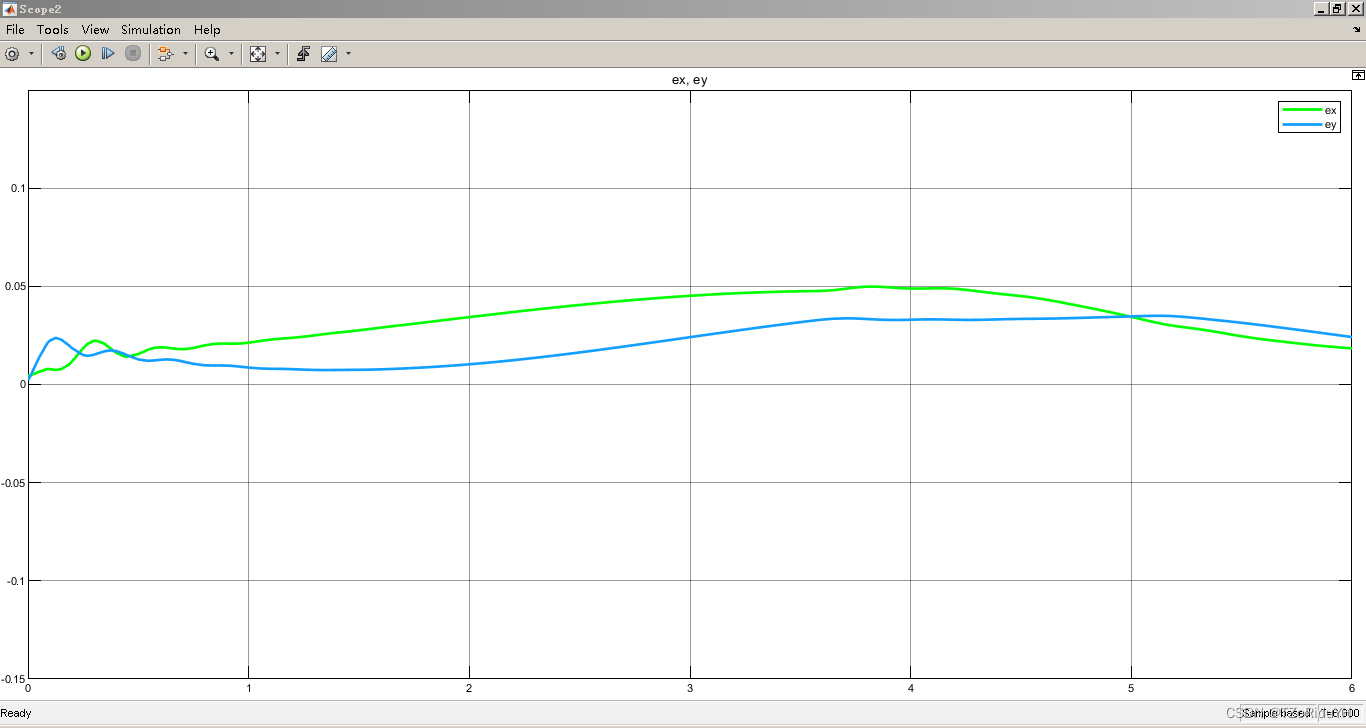
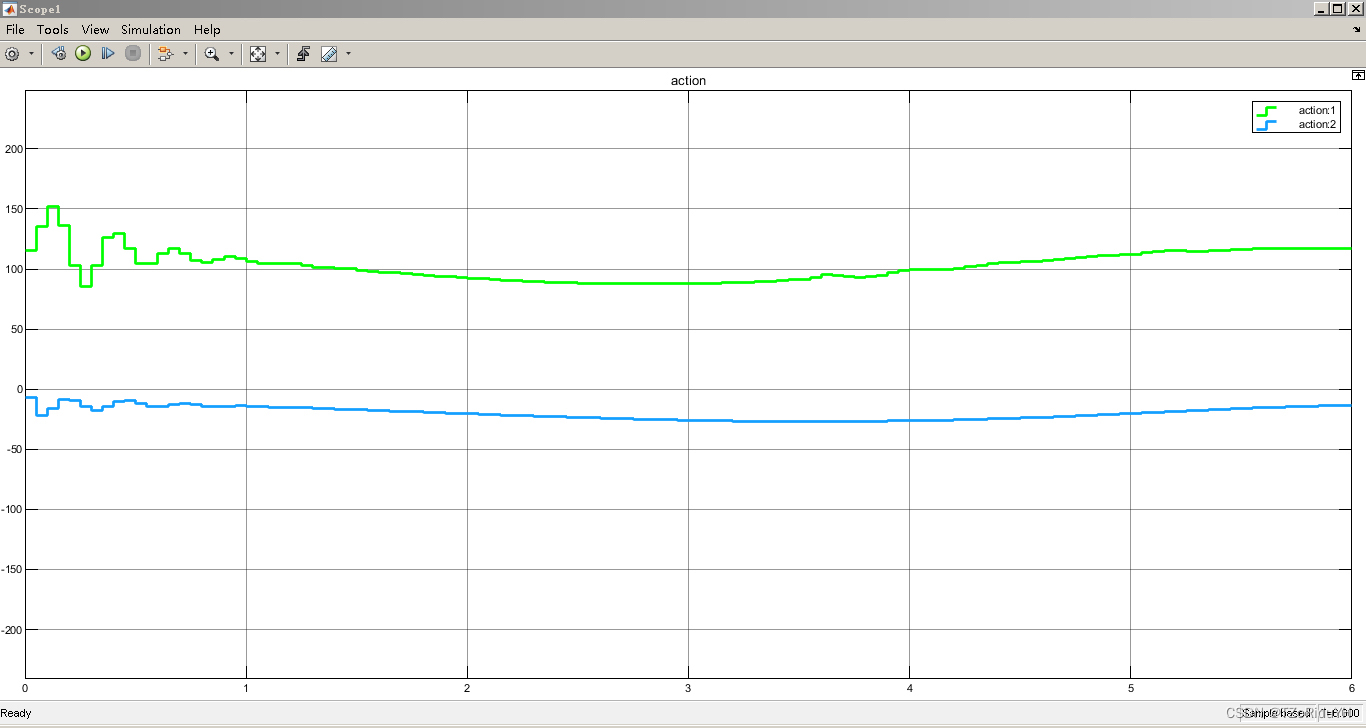
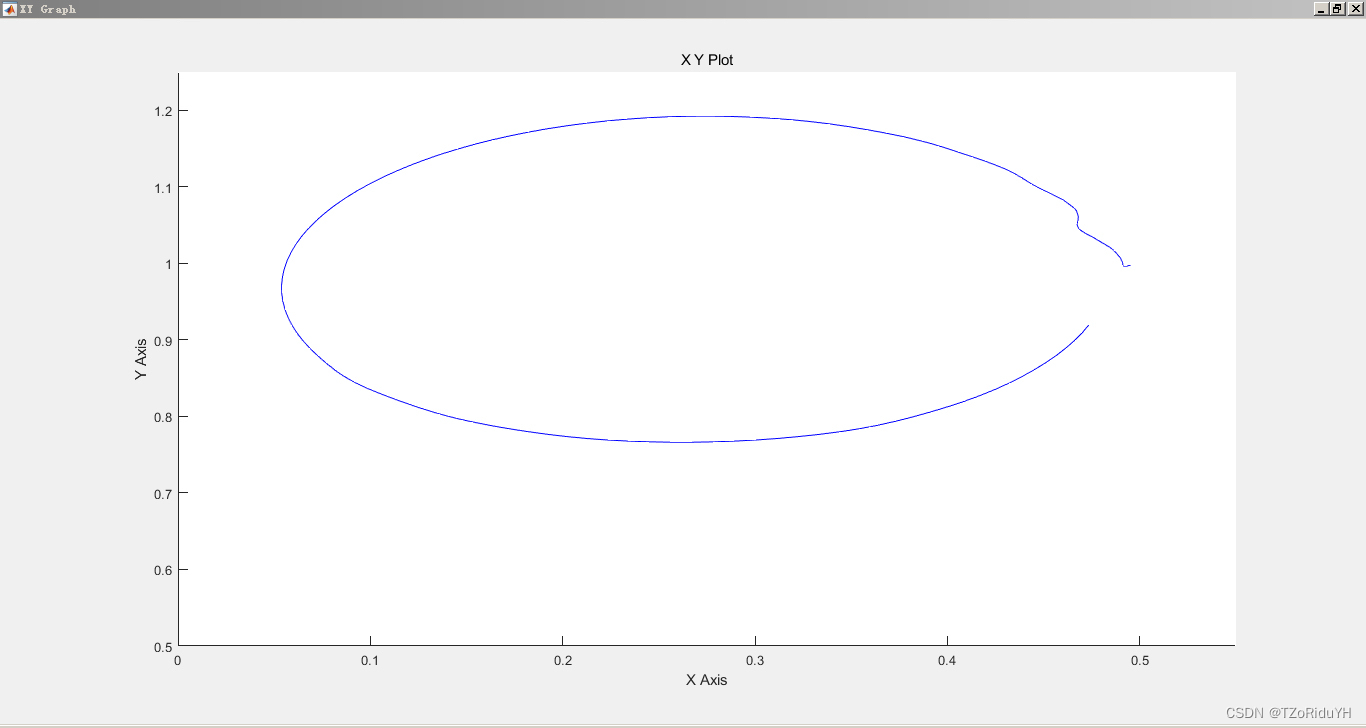
本文的仿真实验基于Simulink平台进行。我们通过Simulink构建了2自由度机械臂和6自由度机械臂的轨迹跟踪模型,并基于强化学习DDPG算法,实现了机械臂的自适应轨迹跟踪控制。仿真结果表明,与传统PID控制器相比,强化学习DDPG控制器具有更好的鲁棒性和自适应性,可以更加精确地控制机械臂的轨迹跟踪。
总之,本文通过对机械臂轨迹跟踪控制的研究,介绍了2自由度机械臂和6自由度机械臂的轨迹跟踪控制方法,并结合强化学习DDPG算法实现了自适应的机械臂轨迹跟踪控制。本文的研究成果对于提高机械臂的控制精度和效率具有重要意义,也为未来的机器人控制研究提供了新的思路和方法。
相关代码,程序地址:http://lanzouw.top/670530607621.html















 621
621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









