







引言:安全架构,是花架子还是真功夫?
各位同行,摸爬滚打网络安全这行当也有些年头了。眼瞅着汽车行业这几年“触网”越来越深,功能安全标准ISO 26262也成了香饽饽。最近,国家也开始强调智能网联汽车的安全准入,这架势,功能安全搞不好,车都卖不出去!
注:图片来源于网络,如有侵权,请及时联系作者删除。
但问题来了,这玩意儿真正落地,难啊!尤其国内,很多企业还在摸着石头过河。系统安全架构设计,听着高大上,实际操作起来,一堆坑。架构设计的好坏,直接决定了系统的安全性。但功能安全标准那套东西,又臭又长,理解起来费劲。所以,今天就来聊聊我对系统安全架构设计的理解,希望能帮大家少踩点坑。
➡本文主要内容分为6个部分(约7700字,30分钟阅读)
目录
| 01 | 抛砖引玉:安全架构,没你想的那么简单 |
|---|---|
| 02 | 安全架构设计:那些“不说人话”的术语,得掰开了揉碎了讲 |
| 03 | E-GAS三层架构:经典案例,但别迷信 |
| 04 | ADAS系统安全架构:安全等级分解,到底怎么玩? |
| 05 | 总结:安全这事儿,没有银弹 |
| 06 | 参考文献 |
01
抛砖引玉:安全架构,没你想的那么简单
说实话,国内真正重视功能安全设计,也就这几年的事儿。很多企业都是从2014年才开始关注,起步晚,底子薄。现在汽车电子电气系统发展速度飞快,安全设计跟不上,就容易出问题。
系统安全架构设计,是整个安全体系的基石。但功能安全标准的要求,那是相当复杂。如何在系统设计之初,就充分考虑安全因素,成了很多人的难题。
我个人在功能安全领域摸爬滚打了八年多,在外企、合资企业都干过,三电系统、ADAS系统都搞过。这次受邀来分享,就是想结合自己的经验,跟大家聊聊系统安全架构设计。当然,我水平有限,说的也不一定对,大家就当是交流讨论,别太当真。
内容框架:
安全架构设计:那些“不说人话”的术语,得掰开了揉碎了讲
E-GAS三层架构:经典案例,但别迷信
ADAS系统安全架构:安全等级分解,到底怎么玩?
02
安全架构设计:那些“不说人话”的术语,得掰开了揉碎了讲
ISO 26262标准,第三、四、九部分,一堆安全术语,什么故障类型、安全分解、故障控制/避免措施……看得人头大。但这些术语,是安全架构设计的核心。理解不透,设计就没法做。所以,咱们今天就来系统性地梳理一下这些术语,看看它们之间到底是什么关系。
故障控制措施(Fault control)VS 故障避免措施(Fault avoidance):别把所有鸡蛋放一个篮子里
功能安全标准里,经常提到系统性失效和随机硬件失效,说这是电子电气系统的两大失效来源。但记住,不是所有失效都能靠安全机制来解决。得先做FMEA、FTA分析,找出可能违背安全目标的失效来源,然后才能制定对应的安全措施。
如果某个器件的随机硬件失效,或者某个功能的系统性失效,能通过安全机制诊断或者控制,达到安全状态,那这种安全措施就是故障控制措施。
但如果某个算法或者安全控制逻辑,没法用安全机制来诊断和控制,那就得在功能实现本身上下功夫,提高安全等级,覆盖系统性失效。这种就叫故障避免措施。
这里有个关键点:故障控制措施的安全需求,通常不用再分解了,直接按对应安全级别设计就行。但故障避免措施的安全需求,如果需要,可以进一步ASIL分解,做冗余设计。
安全分解(Decomposition)VS 分配(Allocation):不是你想分,想分就能分
安全分解和分配,通常是在上游安全需求往下游设计细化时考虑的。分配是必须的,但分解不是。在考虑分解或分配时,得先有个大概的系统架构,包括物理和逻辑架构。然后结合FTA、FMEA等安全分析,将安全相关的诊断或控制需求分配到架构元素中。
分配和分解,有几个原则要记住:
- 分配最简原则: 能一个元素搞定的,就别分给多个。
- 分配最后原则: 能由安全关键路径的最后一个元素实施的,就分配给它。
- 分解最大可用性原则: 充分利用现有冗余元素,别没事找事新增冗余。
- 分解最简原则: 诊断或实施过程复杂的,就采取更简单有效的安全设计,给它分配更高的安全等级。
冗余(Redundant)VS 独立性 (Independent) 设计:鸡蛋不能放在同一个篮子里,篮子还得是独立的
安全分解后,得保证分解后的功能,既冗余又独立。
冗余,是指分解后的多个功能,能分别独立地完成上游安全需求。注意,预期功能和安全机制,通常不能直接构成冗余,除非安全机制能完全执行预期功能的安全要求,并独立控制系统进入安全状态。
独立性,是指分解后的功能之间,不存在共同的失效来源,或者失效能被合理的安全机制覆盖。
独立性,就是要避免共因失效和级联失效。这两种失效,通常要通过FTA、FFI分析来识别,然后通过DFA分析来确认分解后的元素完全独立。
失效安全(Fail safe)、失效静默(Fail silent)、失效运行(Fail operational)VS 紧急运行(Emergency operation):安全状态,不是你想选哪个就选哪个
考虑产品功能失效时,要根据产品功能的可用性要求,选择合适的失效属性,从而确定安全状态。
- 失效安全(Fail safe): 系统失效后,特定功能关闭,系统维持在安全状态。
- 失效静默(Fail silent): 系统失效后,对外表现为静默状态,不干扰其他功能。
- 失效运行(Fail operational): 系统失效后,仍然能按照既定操作进行。
- 紧急运行(Emergency operation): 安全状态无法在可接受时间内实现时,让系统在FTTI时间内过渡到安全状态。
总而言之,安全架构设计,要考虑:
- 如何分配安全需求?
- 如何考虑安全分解?
- 如何考虑安全状态设计?
当然,具体设计时,还得参考安全标准的具体要求。
03
E-GAS三层架构:经典案例,但别迷信
搞功能安全的,应该都知道汽油发动机管理系统的E-GAS三层安全架构。这架构虽然不是专门为功能安全设计的,但它提供了一个很好的安全分解解决方案。基于Lockstep Core设计,可以支持到最高ASIL D级别。
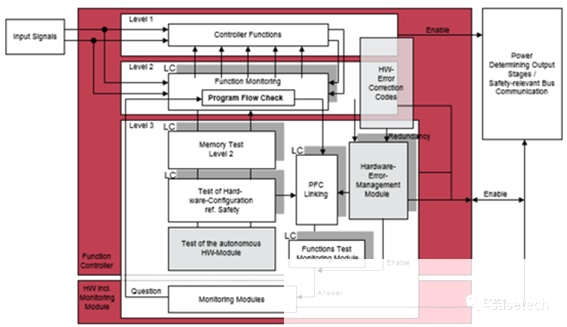
图3.1-E-GAS三层安全架构带LC示意图
(图片来源参考文献[3])
用三层架构做安全分解,要注意:
- L2层级的安全控制功能输入,要独立于L1层级,保证独立性。
- L2可以对L1层级的输出信号进行诊断,诊断输出控制要独立于L1的输出控制,直接对系统进行关断控制,保证安全状态控制的独立性。
- L2也可以通过输入信号进行独立的功能诊断,诊断输出控制要独立于L1的输出控制,直接对系统进行关断控制,保证安全状态控制的独立性。
- 外部监控设备,要能独立地对系统进行关断控制,不依赖L1或L2的控制指令,避免相关性失效。
E-GAS架构的安全分解策略,没有固定要求,但通常推荐QM(X) + X(X)的分解策略。原因很简单:
- 系统功能设计已经比较成熟,重构复杂程度高。
- 系统功能安全需求不多,且能用相对简单的策略做冗余设计。
所以,传统的三电系统、发动机管理系统、变速箱控制系统、车身控制系统,都可以用E-GAS架构。配合英飞凌AURIX(带Lockstep)+SBC(ASIL D)硬件解决方案,能快速实现高等级的功能安全设计。VCU、MCU等新能源汽车控制器,也经常用E-GAS架构来实现ASIL D等级设计。
但要注意,对于复杂的新系统,或者安全需求多且不易分解的,不建议直接用E-GAS三层架构。比如,自动驾驶系统的域控制器和备份控制器,安全需求除了MCU控制功能,还涉及感知、定位和规划算法。SoC和MCU之间,很难采取统一的安全监控架构。即使用了E-GAS架构,也需要做大量冗余功能和独立性设计,成本太高。这种系统,可以考虑直接对安全的功能路径进行对应级别的开发,做好独立性设计就行。
04
ADAS系统安全架构设计:安全等级分解,到底怎么玩?
设计ADAS系统的安全架构,首先要确定系统的自动驾驶等级,这决定了系统的安全状态。参考SAE J3016定义:

图4.1-SAE J3016自动驾驶功能等级定义
(图片来源参考文献[2])
SAE LEVEL 2及以下的ADAS功能,驾驶员要时刻监督系统运行,保证驾驶安全。这种系统,可以考虑失效静默架构,系统失效时,关闭功能就行。
但SAE LEVEL 3级别的ADAS功能,系统失效后,仍然需要在一定时间内(通常10秒以上),正确执行DDT,或者进行功能降级运行。这种系统,需要设计紧急操作或失效运行功能(L4及以上)。主控制器失效后,备份系统至少要在规定时间内保持动态驾驶任务,并提示驾驶员接管。
SAE并没有要求自动驾驶系统必须做完全的失效运行,只要求接管系统在失效时,能在一定时间内让车辆到达最小风险状态。所以,设计ADAS架构时,不一定需要考虑系统失效时还能执行完整DDT的能力,只需要考虑接管系统是否有能力通过功能降级,以及驾驶员未接管后由紧急运行使车辆达到最小风险状态即可。
L3及以上级别自动驾驶系统安全等级评估:别一上来就ASIL D
高安全等级的自动驾驶系统,允许驾驶员脱眼或脱手。评估功能安全目标时,部分危害事件S、E、C会评定为最高分,得到ASIL D级别的安全目标。安全目标被违背时,系统又无法通过功能静默直接进入安全状态,控制信号的可用性设计也会要求满足ASIL D。
现在市场上,ADAS系统设计五花八门,但整体的功能安全目标和最高级别,通常都是ASIL D。为了实现最小成本的解决方案,需要在满足安全要求的前提下,尽量简化系统设计。建议基于SAE标准下的系统架构要素,分解功能安全需求。比如,将fallback系统与Main系统进行冗余,将控制指令可用性失效需求分解由fallback和Main系统实现,考虑两者之间的独立性设计,可以将部分的安全指标降级。下面用一个抽象的ADAS系统架构,来描述功能安全ASILD级别在架构上的分解和分配关系。
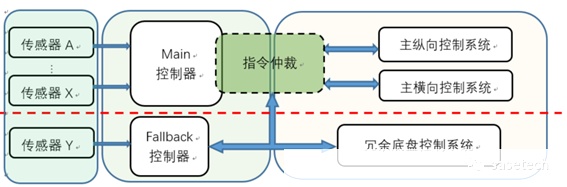
图4.2-L3+ADAS自动驾驶系统抽象架构
注意:图4.2中,为了实现ADAS域控制指令的独立性,实现安全分解,将ADAS指令仲裁功能分配给底盘动力域控制器。实际项目中,指令仲裁功能也可能由ADAS Main控制器实现,通过一定的机制实现自动指令转换,基于此结构,运动域控可以不需要;另外指令仲裁功能也可以集成在底盘域控系统中。对于执行器端的冗余设计,可以基于不同的ADAS功能和安全降级的要求进行必要冗余,而非横纵向完全冗余。执行器端具体方案在本文不做详细展开。
假设ADAS系统的整体安全目标简化为:
防止非预期的不能提供控制指令,ASIL D:
基于图4.2,Fallback系统作为Main系统的冗余系统,通过完全的冗余和独立可以将安全指令的可用性需求分解为ASIL B(D)即:
-
Main 系统需要提供正确的横向和纵向控制指令ASIL B(D)
-
Fallback 系统需要提供正确的横向和纵向控制指令ASIL B(D)
-
Main 系统和Fallback系统的控制指令需要完全独立 ASIL D(独立性要求)
注意,Fallback和Main控制器需要“热冗余”。热冗余是指在Main运行过程中,Fallback也应该同时运行,主要用于减少主控制器失效时指令切换的时间。同时,从安全角度,两者要对自身失效进行诊断,防止非预期的失效导致自身控制指令不可用。无论哪个控制器诊断出自身失效,ADAS系统都需要在一次驾驶循环内进行MRM,或者不允许ADAS功能下次激活。
防止非预期的发出错误控制指令,ASIL D
基于图4.2,ADAS系统运行时主要由Main系统进行仲裁和整车控制,Main系统的安全诊断级别应该做到ASIL D。
Fallback的整车接管控制,在Main失效后才会启动。所以,考虑Fallback系统安全级别时,可以适度降低:
比如,定义SAE ADAS L4系统,主系统失效后,Fallback系统接管后最大有效运行时间为1小时。对Fallback接管功能做HARA分析:
-
Fallback系统的失效造成严重度与Main系统失效相同 (S3);
-
Fallback系统失效后可控度与Main系统失效相同 (C3);
-
评估暴露度时,Fallback功能控车总共时长不超过1小时,相比较Main系统失效场景暴露度E,可以降低其指标,分析过程如下表:
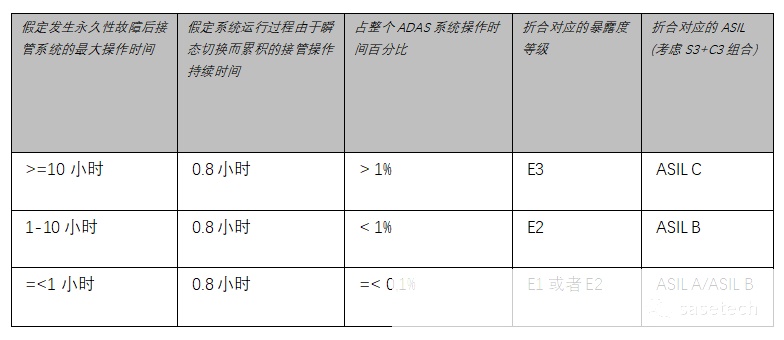
表4.1-1 Fallback系统暴露度指标评估参考
➡发生永久性故障后接管系统的最大操作时间: 假定在最坏情况下,Main控制器在其操作时间内失效。
➡**假定系统运行过程由于瞬态切换而累积的接管操作持续时间:**假定主系统由于系统性原因或者SOTIF影响短暂切换到Fallback系统,恢复后退回Main控制器。考虑在1000小时的ADAS操作时间内,每小时切换3s。
基于以上分析,Fallback系统的operation time,只占ADAS系统operation time不到1%, 可以将其E值由E4降为E2。 对Fallback系统发出错误的控制指令ASIL级别由ASIL D降为 ASIL B。
备注:1. 以上分析假定的前提为Main控制器与Fallback控制器完全独立,其指令仲裁在底盘系统中实施;2. HARA分析中对暴露度E值的评估方法与本文提及的降低策略有偏差,从本文的角度,实际上基于产品Operation time定义来降解,更多的是从降低随机硬件失效概率。对于Fallback控制器系统性失效,很多同行会认为需要按照原始等级(ASIL D)来实施。该分析仅做参考。
总结一下ADAS系统的安全概念:
FSR-1: 在ADAS系统运行过程中,如果Fallback控制器诊断出自身失效,导致无法发出控制指令,Main控制器应该基于Fallback状态,控制系统运行一段时间或者进入MRC*。ASIL B(D) (FSR a,可用性设计,*这里也可以考虑在一个驾驶循环内持续进行DDT);
FSR-2: 在ADAS系统运行过程中,如果Main控制器诊断出自身失效,导致无法发出控制指令,Fallback控制器应该基于当前失效状态,控制系统运行或者降级一段时间或者紧急操作进入MRC。ASIL B(D) (FSR a,可用性设计);
FSR-3: Main控制器应该监控并正确地发出横纵向控制指令,如果Main控制器失效导致无法发出正确的控制指令,Main控制器应该关闭控制输出。ASIL D(FSR b, 防止提供错误的控制指令);
FSR-4: Fallback系统在进行紧急操作或者接管系统驾驶任务过程中,如果Fallback系统监测到自身失效,导致无法发出正确的控制指令,则应该停止发送控制指令 ASIL B (FSR b, 防止提供错误的控制指令)。
目前行业内ADAS系统设计,还没有一个权威且受认可的方案,以上分析和见解仅供参考。
05
总结:安全这事儿,没有银弹
本文基于ISO 26262标准的定义,结合当前汽车零部件供应商和主机厂的功能安全架构设计实践,以及我个人的经验,对功能安全产品架构设计进行了一些描述。希望能解答大家的一些疑惑和难点。
```

黑客/网络安全学习包


资料目录
-
成长路线图&学习规划
-
配套视频教程
-
SRC&黑客文籍
-
护网行动资料
-
黑客必读书单
-
面试题合集
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
*************************************CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享*************************************
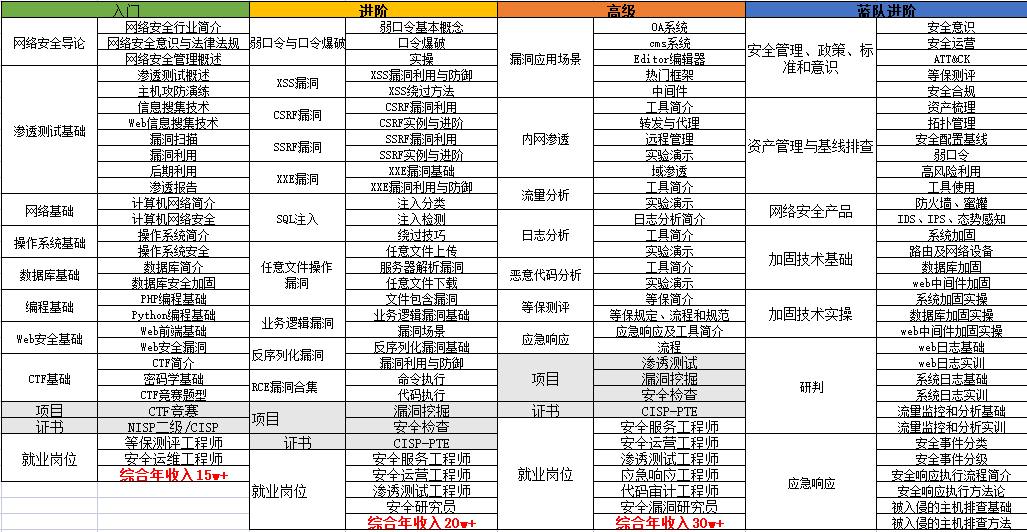
1.成长路线图&学习规划
要学习一门新的技术,作为新手一定要先学习成长路线图,方向不对,努力白费。
对于从来没有接触过网络安全的同学,我们帮你准备了详细的学习成长路线图&学习规划。可以说是最科学最系统的学习路线,大家跟着这个大的方向学习准没问题。

因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
*************************************CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享*************************************
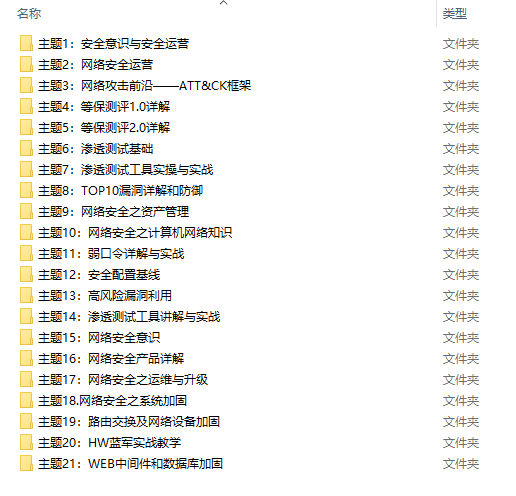
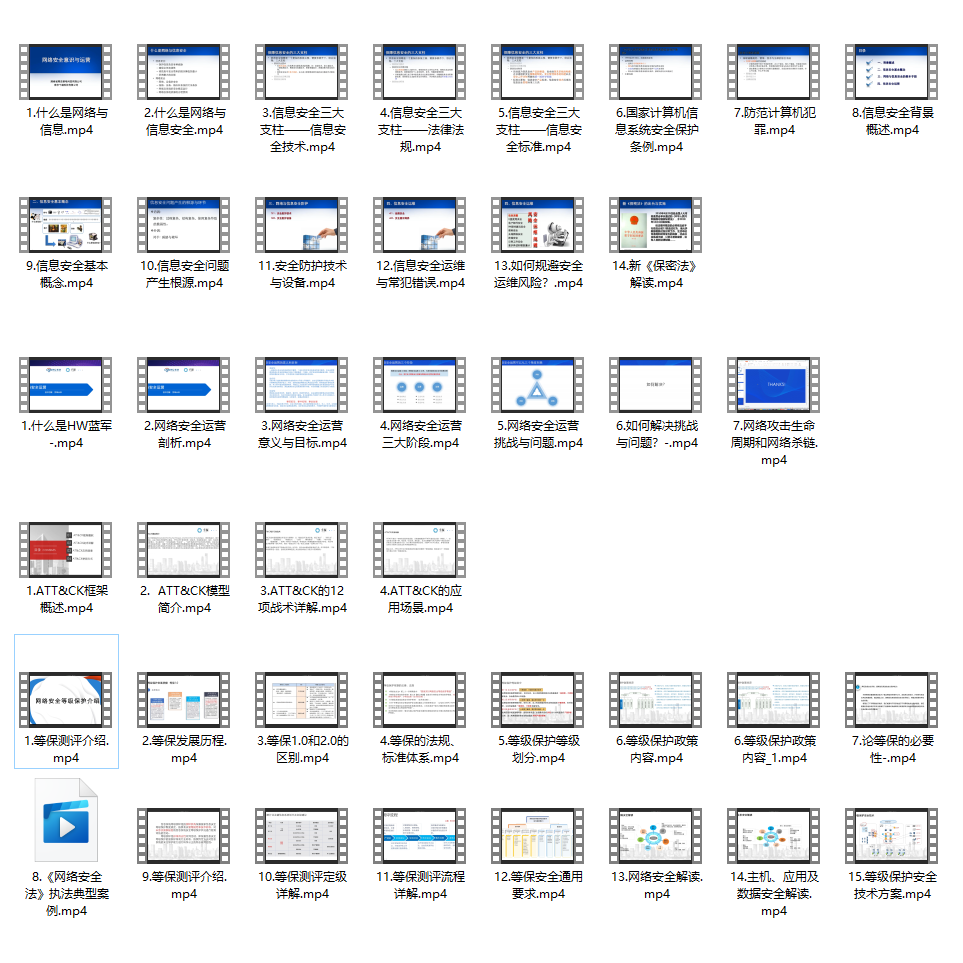
2.视频教程
很多朋友都不喜欢晦涩的文字,我也为大家准备了视频教程,其中一共有21个章节,每个章节都是当前板块的精华浓缩。
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
*************************************CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享*************************************
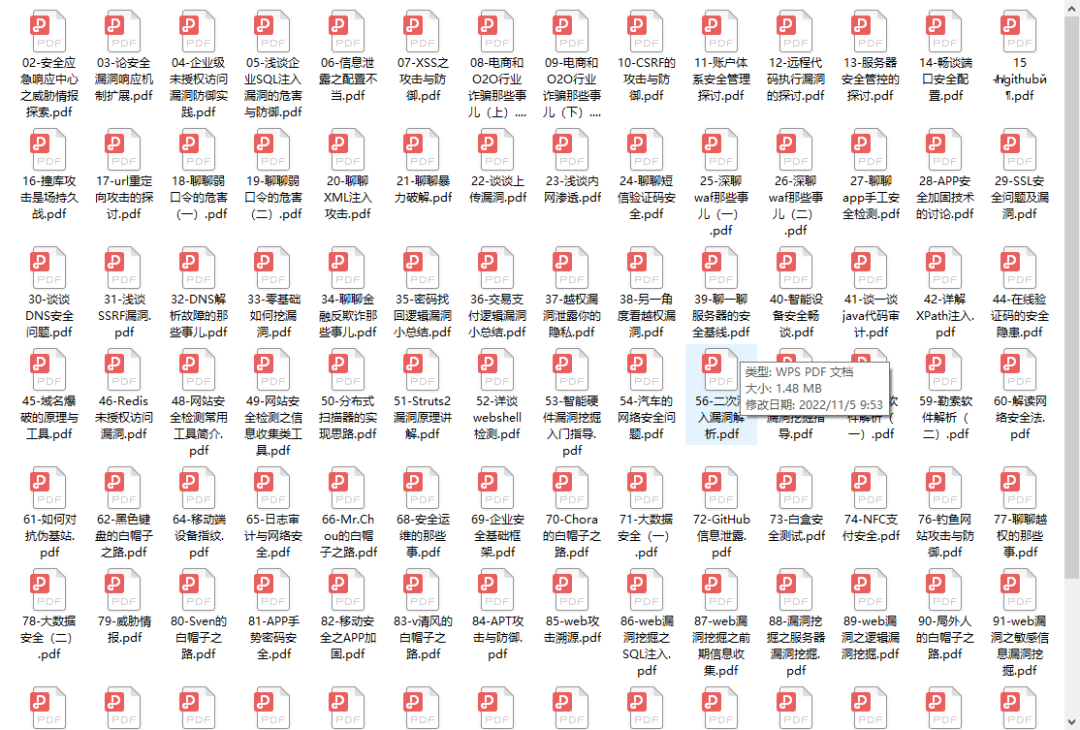
3.SRC&黑客文籍
大家最喜欢也是最关心的SRC技术文籍&黑客技术也有收录
SRC技术文籍:
黑客资料由于是敏感资源,这里不能直接展示哦!
4.护网行动资料
其中关于HW护网行动,也准备了对应的资料,这些内容可相当于比赛的金手指!
5.黑客必读书单
**

**
6.面试题合集
当你自学到这里,你就要开始思考找工作的事情了,而工作绕不开的就是真题和面试题。
更多内容为防止和谐,可以扫描获取~

因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
*************************************CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享*********************************

















 906
906

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









