







Arcball的基本原理


由于目前大多的显示器是二维的,要控制三维物体的旋转就显得不那么直接了。ArcBall是一种将二维鼠标位置的变化映射到三维物体旋转的方法,让用户通过很直观的方法控制物体旋转。

网格代表绘制 3D 模型的窗口,上面放了个半球,这个球就是轨迹球。 假设鼠标在网格上的某点 A,过 A 点作网格所在平面的垂线,与半球相交于点 P, P 就是 A 在轨迹球上的投影。鼠标从 A1 点沿直线移动到 A2 点,对应着轨迹球上的点 P1 沿球面移动到了P2。那么,从球心 O 到 P1 和 P2 分别有两个向量 OP1 和 OP2。 OP1 旋转到了 OP2,我们就认为是模型也按照这个方式作同样的旋转。
计算投影点

红绿蓝三色箭头的交点是摄像机 eye 的位置,红色箭头指向 center 的位置,绿色箭头指向 up 的位置,蓝色箭头指向右侧。 1.绿色和蓝色箭头组成的平面即为程序窗口所在位置,因为 Eye 就在这里嘛。而且 Up 指的就是屏幕正上方, Right 指的就是屏幕正右方。 2.显然轨迹球的半球在图中矩形所在这一侧,球心就是 Eye。
鼠标在 Up 和 Right 所在的平面移动,当它位于 A 点时, 投影到轨迹球的点 P。现在已知的是 Eye、 Center、原始 Up、 A 点在屏幕上的坐标、 向量 Eye-P 的长度、向量 AP 的长度。现在要求 P 点的坐标,只不过是一个数学问题了。



向量(Eye-P) = 向量(Eye-A) + 向量(A-P)。而向量(Eye-A)和向量(A-P)都是可以通过单位长度的 Up、 Center-Eye 和 Right 向量求得的。
计算夹角和旋转度



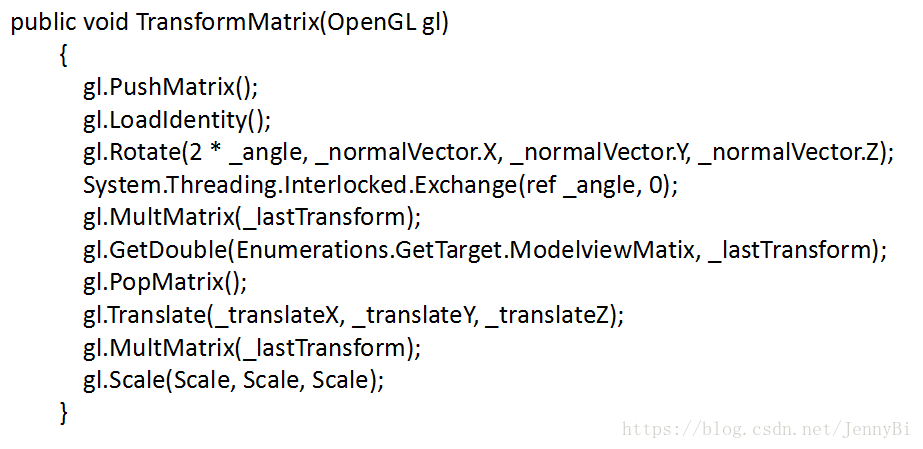
由于我们只计算了鼠标按下的位置和当前鼠标位置的旋转效果,所以上一次旋转的效果在第二次按下鼠标时就消失了。记录下每次的旋转角和旋转轴显然不是一个好办法,因为旋转次数多了以后每帧都要调用非常多的glRotate显然不合适。所以我们记录下每次旋转的旋转矩阵,然后利用矩阵乘法达到累积旋转的效果:


<ArcBall.h>
#pragma once
//#ifndef _ArcBall_h
//#define _ArcBall_h
#include <stdlib.h>
// 仅在Debug模式下,启用断言
#ifdef _DEBUG
# include "assert.h"
#else
# define assert(x) { }
#endif
//2维点
typedef union Tuple2f_t
{
struct
{
GLfloat X, Y;
} s;
GLfloat T[2];
} Tuple2fT;
//3维点
typedef union Tuple3f_t
{
struct
{
GLfloat X, Y, Z;
} s;
GLfloat T[3];
} Tuple3fT;
//4维点
typedef union Tuple4f_t
{
struct
{
GLfloat X, Y, Z, W;
} s;
GLfloat T[4];
} Tuple4fT;
//3x3矩阵
typedef union Matrix3f_t
{
struct
{
//column major
union { GLfloat M00; GLfloat XX; GLfloat SX; };
union { GLfloat M10; GLfloat XY; };
union { GLfloat M20; GLfloat XZ; };
union { GLfloat M01; GLfloat YX; };
union { GLfloat M11; GLfloat YY; GLfloat SY; };
union { GLfloat M21; GLfloat YZ; };
union { GLfloat M02; GLfloat ZX; };
union { GLfloat M12; GLfloat ZY; };
union { GLfloat M22; GLfloat ZZ; GLfloat SZ; };
} s;
GLfloat M[9];
} Matrix3fT;
//4x4矩阵
typedef union Matrix4f_t
{
struct
{
//column major
union { GLfloat M00; GLfloat XX; GLfloat SX; };
union { GLfloat M10; GLfloat XY; };
union { GLfloat M20; GLfloat XZ; };
union { GLfloat M30; GLfloat XW; };
union { GLfloat M01; GLfloat YX; };
union { GLfloat M11; GLfloat YY; GLfloat SY; };
union { GLfloat M21; GLfloat YZ; };
union { GLfloat M31; GLfloat YW; };
union { GLfloat M02; GLfloat ZX; };
union { GLfloat M12; GLfloat ZY; };
union { GLfloat M22; GLfloat ZZ; GLfloat SZ; };
union { GLfloat M32; GLfloat ZW; };
union { GLfloat M03; GLfloat TX; };
union { GLfloat M13; GLfloat TY; };
union { GLfloat M23; GLfloat TZ; };
union { GLfloat M33; GLfloat TW; GLfloat SW; };
} s;
GLfloat M[16];
} Matrix4fT;
//定义类型的别名
#define Point2fT Tuple2fT
#define Quat4fT Tuple4fT
#define Vector2fT Tuple2fT
#define Vector3fT Tuple3fT
#define FuncSqrt sqrtf
# define Epsilon 1.0e-5
//2维点相加
inline
static void Point2fAdd(Point2fT* NewObj, const Tuple2fT* t1)
{
assert(NewObj && t1);
NewObj->s.X += t1->s.X;
NewObj->s.Y += t1->s.Y;
}
//2维点相减
inline
static void Point2fSub(Point2fT* NewObj, const Tuple2fT* t1)
{
assert(NewObj && t1);
NewObj->s.X -= t1->s.X;
NewObj->s.Y -= t1->s.Y;
}
//3维点矢积
inline
static void Vector3fCross(Vector3fT* NewObj, const Vector3fT* v1, const Vector3fT* v2)
{
Vector3fT Result;
assert(NewObj && v1 && v2);
Result.s.X = (v1->s.Y * v2->s.Z) - (v1->s.Z * v2->s.Y);
Result.s.Y = (v1->s.Z * v2->s.X) - (v1->s.X * v2->s.Z);
Result.s.Z = (v1->s.X * v2->s.Y) - (v1->s.Y * v2->s.X);
*NewObj = Result;
}
//3维点点积
inline
static GLfloat Vector3fDot(const Vector3fT* NewObj, const Vector3fT* v1)
{
assert(NewObj && v1);
return (NewObj->s.X * v1->s.X) +
(NewObj->s.Y * v1->s.Y) +
(NewObj->s.Z * v1->s.Z);
}
//3维点的长度的平方
inline
static GLfloat Vector3fLengthSquared(const Vector3fT* NewObj)
{
assert(NewObj);
return (NewObj->s.X * NewObj->s.X) +
(NewObj->s.Y * NewObj->s.Y) +
(NewObj->s.Z * NewObj->s.Z);
}
//3维点的长度
inline
static GLfloat Vector3fLength(const Vector3fT* NewObj)
{
assert(NewObj);
return FuncSqrt(Vector3fLengthSquared(NewObj));
}
//设置3x3矩阵为0矩阵
inline
static void Matrix3fSetZero(Matrix3fT* NewObj)
{
NewObj->s.M00 = NewObj->s.M01 = NewObj->s.M02 =
NewObj->s.M10 = NewObj->s.M11 = NewObj->s.M12 =
NewObj->s.M20 = NewObj->s.M21 = NewObj->s.M22 = 0.0f;
}
//设置4x4矩阵为0矩阵
inline
static void Matrix4fSetZero(Matrix4fT* NewObj)
{
NewObj->s.M00 = NewObj->s.M01 = NewObj->s.M02 =
NewObj->s.M10 = NewObj->s.M11 = NewObj->s.M12 =
NewObj->s.M20 = NewObj->s.M21 = NewObj->s.M22 =
NewObj->s.M30 = NewObj->s.M31 = NewObj->s.M32 = 0.0f;
}
//设置3x3矩阵为单位矩阵
inline
static void Matrix3fSetIdentity(Matrix3fT* NewObj)
{
Matrix3fSetZero(NewObj);
NewObj->s.M00 =
NewObj->s.M11 =
NewObj->s.M22 = 1.0f;
}
//设置4x4矩阵为单位矩阵
inline
static void Matrix4fSetIdentity(Matrix4fT* NewObj)
{
Matrix4fSetZero(NewObj);
NewObj->s.M00 = 1.0f;
NewObj->s.M11 = 1.0f;
NewObj->s.M22 = 1.0f;
NewObj->s.M33 = 1.0f;
}
//从四元数设置旋转矩阵
inline
static void Matrix3fSetRotationFromQuat4f(Matrix3fT* NewObj, const Quat4fT* q1)
{
GLfloat n, s;
GLfloat xs, ys, zs;
GLfloat wx, wy, wz;
GLfloat xx, xy, xz;
GLfloat yy, yz, zz;
assert(NewObj && q1);
n = (q1->s.X * q1->s.X) + (q1->s.Y * q1->s.Y) + (q1->s.Z * q1->s.Z) + (q1->s.W * q1->s.W);
s = (n > 0.0f) ? (2.0f / n) : 0.0f;
xs = q1->s.X * s; ys = q1->s.Y * s; zs = q1->s.Z * s;
wx = q1->s.W * xs; wy = q1->s.W * ys; wz = q1->s.W * zs;
xx = q1->s.X * xs; xy = q1->s.X * ys; xz = q1->s.X * zs;
yy = q1->s.Y * ys; yz = q1->s.Y * zs; zz = q1->s.Z * zs;
NewObj->s.XX = 1.0f - (yy + zz); NewObj->s.YX = xy - wz; NewObj->s.ZX = xz + wy;
NewObj->s.XY = xy + wz; NewObj->s.YY = 1.0f - (xx + zz); NewObj->s.ZY = yz - wx;
NewObj->s.XZ = xz - wy; NewObj->s.YZ = yz + wx; NewObj->s.ZZ = 1.0f - (xx + yy);
}
//3x3矩阵相乘
inline
static void Matrix3fMulMatrix3f(Matrix3fT* NewObj, const Matrix3fT* m1)
{
Matrix3fT Result;
assert(NewObj && m1);
Result.s.M00 = (NewObj->s.M00 * m1->s.M00) + (NewObj->s.M01 * m1->s.M10) + (NewObj->s.M02 * m1->s.M20);
Result.s.M01 = (NewObj->s.M00 * m1->s.M01) + (NewObj->s.M01 * m1->s.M11) + (NewObj->s.M02 * m1->s.M21);
Result.s.M02 = (NewObj->s.M00 * m1->s.M02) + (NewObj->s.M01 * m1->s.M12) + (NewObj->s.M02 * m1->s.M22);
Result.s.M10 = (NewObj->s.M10 * m1->s.M00) + (NewObj->s.M11 * m1->s.M10) + (NewObj->s.M12 * m1->s.M20);
Result.s.M11 = (NewObj->s.M10 * m1->s.M01) + (NewObj->s.M11 * m1->s.M11) + (NewObj->s.M12 * m1->s.M21);
Result.s.M12 = (NewObj->s.M10 * m1->s.M02) + (NewObj->s.M11 * m1->s.M12) + (NewObj->s.M12 * m1->s.M22);
Result.s.M20 = (NewObj->s.M20 * m1->s.M00) + (NewObj->s.M21 * m1->s.M10) + (NewObj->s.M22 * m1->s.M20);
Result.s.M21 = (NewObj->s.M20 * m1->s.M01) + (NewObj->s.M21 * m1->s.M11) + (NewObj->s.M22 * m1->s.M21);
Result.s.M22 = (NewObj->s.M20 * m1->s.M02) + (NewObj->s.M21 * m1->s.M12) + (NewObj->s.M22 * m1->s.M22);
*NewObj = Result;
}
//4x4矩阵相乘
inline
static void Matrix4fSetRotationScaleFromMatrix4f(Matrix4fT* NewObj, const Matrix4fT* m1)
{
assert(NewObj && m1);
NewObj->s.XX = m1->s.XX; NewObj->s.YX = m1->s.YX; NewObj->s.ZX = m1->s.ZX;
NewObj->s.XY = m1->s.XY; NewObj->s.YY = m1->s.YY; NewObj->s.ZY = m1->s.ZY;
NewObj->s.XZ = m1->s.XZ; NewObj->s.YZ = m1->s.YZ; NewObj->s.ZZ = m1->s.ZZ;
}
//进行矩阵的奇异值分解,旋转矩阵被保存到rot3和rot4中,返回矩阵的缩放因子
inline
static GLfloat Matrix4fSVD(const Matrix4fT* NewObj, Matrix3fT* rot3, Matrix4fT* rot4)
{
GLfloat s, n;
assert(NewObj);
s = FuncSqrt(
((NewObj->s.XX * NewObj->s.XX) + (NewObj->s.XY * NewObj->s.XY) + (NewObj->s.XZ * NewObj->s.XZ) +
(NewObj->s.YX * NewObj->s.YX) + (NewObj->s.YY * NewObj->s.YY) + (NewObj->s.YZ * NewObj->s.YZ) +
(NewObj->s.ZX * NewObj->s.ZX) + (NewObj->s.ZY * NewObj->s.ZY) + (NewObj->s.ZZ * NewObj->s.ZZ)) / 3.0f);
if (rot3)
{
rot3->s.XX = NewObj->s.XX; rot3->s.XY = NewObj->s.XY; rot3->s.XZ = NewObj->s.XZ;
rot3->s.YX = NewObj->s.YX; rot3->s.YY = NewObj->s.YY; rot3->s.YZ = NewObj->s.YZ;
rot3->s.ZX = NewObj->s.ZX; rot3->s.ZY = NewObj->s.ZY; rot3->s.ZZ = NewObj->s.ZZ;
n = 1.0f / FuncSqrt((NewObj->s.XX * NewObj->s.XX) +
(NewObj->s.XY * NewObj->s.XY) +
(NewObj->s.XZ * NewObj->s.XZ));
rot3->s.XX *= n;
rot3->s.XY *= n;
rot3->s.XZ *= n;
n = 1.0f / FuncSqrt((NewObj->s.YX * NewObj->s.YX) +
(NewObj->s.YY * NewObj->s.YY) +
(NewObj->s.YZ * NewObj->s.YZ));
rot3->s.YX *= n;
rot3->s.YY *= n;
rot3->s.YZ *= n;
n = 1.0f / FuncSqrt((NewObj->s.ZX * NewObj->s.ZX) +
(NewObj->s.ZY * NewObj->s.ZY) +
(NewObj->s.ZZ * NewObj->s.ZZ));
rot3->s.ZX *= n;
rot3->s.ZY *= n;
rot3->s.ZZ *= n;
}
if (rot4)
{
if (rot4 != NewObj)
{
Matrix4fSetRotationScaleFromMatrix4f(rot4, NewObj);
}
n = 1.0f / FuncSqrt((NewObj->s.XX * NewObj->s.XX) +
(NewObj->s.XY * NewObj->s.XY) +
(NewObj->s.XZ * NewObj->s.XZ));
rot4->s.XX *= n;
rot4->s.XY *= n;
rot4->s.XZ *= n;
n = 1.0f / FuncSqrt((NewObj->s.YX * NewObj->s.YX) +
(NewObj->s.YY * NewObj->s.YY) +
(NewObj->s.YZ * NewObj->s.YZ));
rot4->s.YX *= n;
rot4->s.YY *= n;
rot4->s.YZ *= n;
n = 1.0f / FuncSqrt((NewObj->s.ZX * NewObj->s.ZX) +
(NewObj->s.ZY * NewObj->s.ZY) +
(NewObj->s.ZZ * NewObj->s.ZZ));
rot4->s.ZX *= n;
rot4->s.ZY *= n;
rot4->s.ZZ *= n;
}
return s;
}
//从3x3矩阵变为4x4的旋转矩阵
inline
static void Matrix4fSetRotationScaleFromMatrix3f(Matrix4fT* NewObj, const Matrix3fT* m1)
{
assert(NewObj && m1);
NewObj->s.XX = m1->s.XX; NewObj->s.YX = m1->s.YX; NewObj->s.ZX = m1->s.ZX;
NewObj->s.XY = m1->s.XY; NewObj->s.YY = m1->s.YY; NewObj->s.ZY = m1->s.ZY;
NewObj->s.XZ = m1->s.XZ; NewObj->s.YZ = m1->s.YZ; NewObj->s.ZZ = m1->s.ZZ;
}
//4x4矩阵的与标量的乘积
inline
static void Matrix4fMulRotationScale(Matrix4fT* NewObj, GLfloat scale)
{
assert(NewObj);
NewObj->s.XX *= scale; NewObj->s.YX *= scale; NewObj->s.ZX *= scale;
NewObj->s.XY *= scale; NewObj->s.YY *= scale; NewObj->s.ZY *= scale;
NewObj->s.XZ *= scale; NewObj->s.YZ *= scale; NewObj->s.ZZ *= scale;
}
//设置旋转矩阵
inline
static void Matrix4fSetRotationFromMatrix3f(Matrix4fT* NewObj, const Matrix3fT* m1)
{
GLfloat scale;
assert(NewObj && m1);
scale = Matrix4fSVD(NewObj, NULL, NULL);
Matrix4fSetRotationScaleFromMatrix3f(NewObj, m1);
Matrix4fMulRotationScale(NewObj, scale);
}
typedef class ArcBall_t
{
protected:
//把二维点映射到三维点
inline
void _mapToSphere(const Point2fT* NewPt, Vector3fT* NewVec) const;
public:
//构造/析构函数
ArcBall_t(GLfloat NewWidth, GLfloat NewHeight);
~ArcBall_t() { };
//设置边界
inline
void setBounds(GLfloat NewWidth, GLfloat NewHeight)
{
assert((NewWidth > 1.0f) && (NewHeight > 1.0f));
//设置长宽的调整因子
this->AdjustWidth = 1.0f / ((NewWidth - 1.0f) * 0.5f);
this->AdjustHeight = 1.0f / ((NewHeight - 1.0f) * 0.5f);
}
//鼠标点击
void click(const Point2fT* NewPt);
//鼠标拖动计算旋转
void drag(const Point2fT* NewPt, Quat4fT* NewRot);
//更新鼠标状态
void upstate();
//void mousemove(WPARAM wParam,LPARAM lParam);
protected:
Vector3fT StVec; //保存鼠标点击的坐标
Vector3fT EnVec; //保存鼠标拖动的坐标
GLfloat AdjustWidth; //宽度的调整因子
GLfloat AdjustHeight; //长度的调整因子
public:
Matrix4fT Transform; //计算变换
Matrix3fT LastRot; //上一次的旋转
Matrix3fT ThisRot; //这次的旋转
float zoomRate;
float lastZoomRate;
bool isDragging; // 是否拖动
bool isRClicked; // 是否右击鼠标
bool isClicked; // 是否点击鼠标
bool isZooming; //是否正在缩放
Point2fT LastPt;
Matrix4fT origTransform;
Point2fT MousePt; // 当前的鼠标位置
} ArcBallT;
<Arcball.cpp>//#include "stdafx.h"
#define GLUT_DISABLE_ATEXIT_HACK
#include <GL/glew.h>
#include <math.h>
#include "ArcBall.h"
//轨迹球参数:
//直径 2.0f
//半径 1.0f
//半径平方 1.0f
void ArcBall_t::_mapToSphere(const Point2fT* NewPt, Vector3fT* NewVec) const
{
Point2fT TempPt;
GLfloat length;
//复制到临时变量
TempPt = *NewPt;
//把长宽调整到[-1 ... 1]区间
TempPt.s.X = (TempPt.s.X * this->AdjustWidth) - 1.0f;
TempPt.s.Y = 1.0f - (TempPt.s.Y * this->AdjustHeight);
//计算长度的平方
length = (TempPt.s.X * TempPt.s.X) + (TempPt.s.Y * TempPt.s.Y);
//如果点映射到球的外面
if (length > 1.0f)
{
GLfloat norm;
//缩放到球上
norm = 1.0f / FuncSqrt(length);
//设置z坐标为0
NewVec->s.X = TempPt.s.X * norm;
NewVec->s.Y = TempPt.s.Y * norm;
NewVec->s.Z = 0.0f;
}
//如果在球内
else
{
//利用半径的平方为1,求出z坐标
NewVec->s.X = TempPt.s.X;
NewVec->s.Y = TempPt.s.Y;
NewVec->s.Z = FuncSqrt(1.0f - length);
}
}
ArcBall_t::ArcBall_t(GLfloat NewWidth, GLfloat NewHeight)
{
this->StVec.s.X = 0.0f;
this->StVec.s.Y = 0.0f;
this->StVec.s.Z = 0.0f;
this->EnVec.s.X = 0.0f;
this->EnVec.s.Y = 0.0f;
this->EnVec.s.Z = 0.0f;
Matrix4fSetIdentity(&Transform);
Matrix3fSetIdentity(&LastRot);
Matrix3fSetIdentity(&ThisRot);
this->isDragging = false;
this->isClicked = false;
this->isRClicked = false;
this->isZooming = false;
this->zoomRate = 1;
this->setBounds(NewWidth, NewHeight);
}
void ArcBall_t::upstate()
{
if (!this->isZooming && this->isRClicked) { // 开始拖动
this->isZooming = true; // 设置拖动为变量为true
this->LastPt = this->MousePt;
this->lastZoomRate = this->zoomRate;
}
else if (this->isZooming) {//正在拖动
if (this->isRClicked) { //拖动
Point2fSub(&this->MousePt, &this->LastPt);
this->zoomRate = this->lastZoomRate + this->MousePt.s.X * this->AdjustWidth * 2;
}
else { //停止拖动
this->isZooming = false;
}
}
else if (!this->isDragging && this->isClicked) { // 如果没有拖动
this->isDragging = true; // 设置拖动为变量为true
this->LastRot = this->ThisRot;
this->click(&this->MousePt);
}
else if (this->isDragging) {
if (this->isClicked) { //如果按住拖动
Quat4fT ThisQuat;
this->drag(&this->MousePt, &ThisQuat); // 更新轨迹球的变量
Matrix3fSetRotationFromQuat4f(&this->ThisRot, &ThisQuat); // 计算旋转量
Matrix3fMulMatrix3f(&this->ThisRot, &this->LastRot);
Matrix4fSetRotationFromMatrix3f(&this->Transform, &this->ThisRot);
}
else // 如果放开鼠标,设置拖动为false
this->isDragging = false;
}
}
//按下鼠标,记录当前对应的轨迹球的位置
void ArcBall_t::click(const Point2fT* NewPt)
{
this->_mapToSphere(NewPt, &this->StVec);
}
//鼠标拖动,计算旋转四元数
void ArcBall_t::drag(const Point2fT* NewPt, Quat4fT* NewRot)
{
//新的位置
this->_mapToSphere(NewPt, &this->EnVec);
//计算旋转
if (NewRot)
{
Vector3fT Perp;
//计算旋转轴
Vector3fCross(&Perp, &this->StVec, &this->EnVec);
//如果不为0
if (Vector3fLength(&Perp) > Epsilon)
{
//记录旋转轴
NewRot->s.X = Perp.s.X;
NewRot->s.Y = Perp.s.Y;
NewRot->s.Z = Perp.s.Z;
//在四元数中,w=cos(a/2),a为旋转的角度
NewRot->s.W = Vector3fDot(&this->StVec, &this->EnVec);
}
//是0,说明没有旋转
else
{
NewRot->s.X =
NewRot->s.Y =
NewRot->s.Z =
NewRot->s.W = 0.0f;
}
}
}myArcBall.cpp 部分代码//初始化,必须用全局变量的方式,不能用new
ArcBallT arcBall(600.0f, 400.0f);
ArcBallT* ArcBall = &arcBall;// new ArcBallT(600.0f,400.0f);//&arcBall;//移动
void move(int x, int y)
{
ArcBall->MousePt.s.X = x;
ArcBall->MousePt.s.Y = y;
ArcBall->upstate();
glutPostRedisplay();
}
//点击
void mouse(int button, int state, int x, int y)
{
if (button == GLUT_LEFT_BUTTON && state == GLUT_DOWN) {
ArcBall->isClicked = true;
move(x, y);
}
else if (button == GLUT_LEFT_BUTTON && state == GLUT_UP)
ArcBall->isClicked = false;
else if (button == GLUT_RIGHT_BUTTON && state == GLUT_DOWN) {
ArcBall->isRClicked = true;
move(x, y);
}
else if (button == GLUT_RIGHT_BUTTON && state == GLUT_UP)
ArcBall->isRClicked = false;
ArcBall->upstate();
glutPostRedisplay();
}glutMouseFunc(mouse); //registered the mouse event.
glutMotionFunc(move); //registered the move event














 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









