







参考文档
1. 安装
首先,我们先查一下我们的pytorch的版本。要求至少安装 PyTorch 1.2.0 版本:
python -c "import torch; print(torch.__version__)"
接着,查询对应pytorch安装的CUDA的版本:
python -c "import torch; print(torch.version.cuda)"
然后,安装Pytorch geometry的软件包。需要注意的是,这里的${CUDA}是前面查询到的CUDA的版本(cpu, cu92, cu101, cu102),${TORCH}是前面查到的pytorch的版本。(建议将pytorch升级到最新版本再进行安装)
pip install torch-scatter==latest+${CUDA} -f https://pytorch-geometric.com/whl/torch-${TORCH}.html
pip install torch-sparse==latest+${CUDA} -f https://pytorch-geometric.com/whl/torch-${TORCH}.html
pip install torch-cluster==latest+${CUDA} -f https://pytorch-geometric.com/whl/torch-${TORCH}.html
pip install torch-spline-conv==latest+${CUDA} -f https://pytorch-geometric.com/whl/torch-${TORCH}.html
pip install torch-geometric
比如我这里查到Pytorch的版本是1.5.1(按照官网的教程,pytorch版本为1.5.0或者1.5.1的按照1.5.0来安装),CUDA的版本是10.2,那么我的安装语句如下:
pip install torch-scatter==latest+cu102 -f https://pytorch-geometric.com/whl/torch-1.5.0.html
pip install torch-sparse==latest+cu102 -f https://pytorch-geometric.com/whl/torch-1.5.0.html
pip install torch-cluster==latest+cu102 -f https://pytorch-geometric.com/whl/torch-1.5.0.html
pip install torch-spline-conv==latest+cu102 -f https://pytorch-geometric.com/whl/torch-1.5.0.html
pip install torch-geometric
【2021年10月20日更新】
最近更新了一下Pytorch的版本,发现可以通过pip install torch-scatter torch-sparse torch-cluster torch-spline-conv torch-geometric -f https://data.pyg.org/whl/torch-1.9.0+cu102.html来安装,这样就简便很多。官网的地址放在这里,大家安装的时候最好先去官网看一下~
2. 基本概念介绍
2.1 Data Handling of Graphs 图形数据处理
图(Graph)是描述实体(节点)和关系(边)的数据模型。在Pytorch Geometric中,图被看作是torch_geometric.data.Data的实例,并拥有以下属性:
| 属性 | 描述 |
|---|---|
data.x | 节点特征,维度是[num_nodes, num_node_features]。 |
data.edge_index | 维度是[2, num_edges],描述图中节点的关联关系,每一列对应的两个元素,分别是边的起点和重点。数据类型是torch.long。需要注意的是,data.edge_index是定义边的节点的张量(tensor),而不是节点的列表(list)。 |
data.edge_attr | 边的特征矩阵,维度是[num_edges, num_edge_features] |
data.y | 训练目标(维度可以是任意的)。对于节点相关的任务,维度为[num_nodes, *];对于图相关的任务,维度为[1,*]。 |
data.position | 节点位置矩阵(Node position matrix),维度为[num_nodes, num_dimensions]。 |
下面是一个简单的例子:
首先导入需要的包:
import torch
from torch_geometric.data import Data

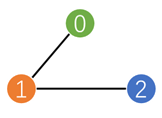
比如上图所示的图结构,我们首先定义节点特征向量:
x = torch.tensor([[-1], [0], [1]], dtype=torch.float)
接着定义边,下面两种定义方式是等价的。第二种方式可能更符合我们的阅读习惯,但是需要注意的是此时应当增加一个edge_index=edge_index.t().contiguous()的操作。此外,由于是无向图,虽然只有两条边,但是我们需要四组关系说明来描述边的两个方向。
## 法1
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
data = Data(x=x, edge_index=edge_index)
## 法2
edge_index = torch.tensor([[0, 1],
[1, 0],
[1, 2],
[2, 1]], dtype=torch.long)
data = Data(x=x, edge_index=edge_index.t().contiguous())
可以得到:
>>> Data(edge_index=[2, 4], x=[3, 1])
同时,Data对象提供了一些很实用的函数:
print('data\'s keys: {}'.format(data.keys))
print('-'*5)
for key, item in data:
print("{} found in data".format(key))
print('-'*5)
print('Does data has attribute \'edge_attr\'? {}'.format('edge_attr' in data))
print('data has {} nodes'.format(data.num_nodes))
print('data has {} edges'.format(data.num_edges))
print('The nodes in data have {} feature(s)'.format(data.num_node_features))
print('Does data contains isolated nodes? {}'.format(data.contains_isolated_nodes()))
print('Does data contains self loops? {}'.format(data.contains_self_loops()))
print('is data directed? {}'.format(data.is_directed()))
print(data['x'])
输出:
data's keys: ['x', 'edge_index']
-----
edge_index found in data
x found in data
-----
Does data has attribute 'edge_attr'? False
data has 3 nodes
data has 4 edges
The nodes in data have 1 feature(s)
Does data contains isolated nodes? False
Does data contains self loops? False
is data directed? False
tensor([[-1.],
[ 0.],
[ 1.]])
同样可以在GPU上运行data:
device = torch.device('cuda')
data = data.to(device)
2.2 Common Benchmark Datasets 常见的基准数据集
PyTorch Geometric提供很多基准数据集,包括
- all Planetoid datasets (Cora, Citeseer, Pubmed)
- all graph classification datasets from http://graphkernels.cs.tu-dortmund.de and their cleaned versions
- the QM7 and QM9 dataset
- a handful of 3D mesh/point cloud datasets like FAUST, ModelNet10/40 and ShapeNet
想要使用这些数据集,只要进行初始化,数据就会自动下载。比如我们要使用ENZYMES数据集(该数据集包括600张图,有6个类别):
from torch_geometric.datasets import TUDataset
dataset = TUDataset(root='.\data\ENZYMES', name='ENZYMES')
程序就会自动执行下载:
Downloading http://ls11-www.cs.tu-dortmund.de/people/morris/graphkerneldatasets/ENZYMES.zip
Extracting data\ENZYMES\ENZYMES\ENZYMES.zip
Processing...
Done!
我们可以看一下这个数据集的一些属性:
print(dataset)
print(len(dataset))
print(dataset.num_classes)
print(dataset.num_node_features)
输出:
ENZYMES(600)
600
6
3
我们可以看下其中一张图的结构:
data = dataset[14]
print(data)
print(data.is_undirected())
输出:
Data(edge_index=[2, 128], x=[36, 3], y=[1])
True
我们可以看到数据集中的第一个图包含36个节点,每个节点有3个特征。图中有128/2 = 64条无向边,图被分类为“1”类。在将数据集分为训练集和测试集之前,可以调用dataset = dataset.shuffle()将数据集进行随机打乱。这个语句和下面这段程序是等价的:
perm = torch.randperm(len(dataset))
dataset = dataset[perm]
我们再来看硬外一个数据集Cora
from torch_geometric.datasets import Planetoid
dataset = Planetoid(root='.\data\Cora', name='Cora')
data = dataset[0]
print(data)
print(data.is_undirected())
print(data.train_mask.sum().item())
print(data.val_mask.sum().item())
print(data.test_mask.sum().item())
print(len(dataset))
print(dataset.num_classes)
print(dataset.num_node_features)
输出:
Data(edge_index=[2, 10556], test_mask=[2708], train_mask=[2708], val_mask=[2708], x=[2708, 1433], y=[2708])
True
140
500
1000
1
7
1433
可以看到,前面的数据集针对的是“网络分类”的任务,而这个数据集针对的是“节点分类”的任务。每个节点又1433个特征,被分为7类。这个图是一个无向图,共有10556/2=5278条边,共有2708个节点。这里有三个需要注意的参数:
train_mask——指明训练集中的节点(可以看到,在这个数据集中,训练集里有140个节点)val_mask——指明验证集中的节点(可以看到,在这个数据集中,验证集里有500个节点)test_mask——指明测试集中的节点(可以看到,在这个数据集中,测试集里有1000个节点)
2.3 Mini-batches
神经网络通常以批处理的方式进行训练。在pytorch中,通常用数据加载器DataLoader来进行批处理。
from torch_geometric.datasets import TUDataset
from torch_geometric.data import DataLoader
from torch_scatter import scatter_mean
dataset = TUDataset(root='.\data\ENZYMES', name='ENZYMES', use_node_attr=True)
loader = DataLoader(dataset, batch_size=32, shuffle=True)
for data in loader:
print(data)
print(data.num_graphs)
x = scatter_mean(data.x, data.batch, dim=0)
print(x.size())
输出:
Batch(batch=[917], edge_index=[2, 3672], x=[917, 21], y=[32])
32
torch.Size([32, 21])
……
可以看到,第一个batch里面包括917个节点,每个节点拥有21个节点特征,有32张图。batch实质上就是节点的标签, b a t c h i = g i batch_i=g_i batchi=gi表示第 i i i个节点属于第 g i g_i gi张图。
这个scatter函数实质上是对节点的一个整合,节点根据batch的标签(按照图)来进行整合,下面这张官方文档中的图可以很好地说明scatter函数的作用:

2.4 Data Transforms 数据转换
torch_geometric.transforms.Compose提供了数据转换的方法,可以方便用户将数据转换成既定的格式或者用于数据的预处理。在之前使用torchvision处理图像时,也会用到数据转换的相关方法,将图片转换成像素矩阵,这里的数据转换就类似torchvision在图像上的处理。
2.5 Learning Methods on Graphs——the first graph neural network 搭建我们的第一个图神经网络
下面我们来尝试着搭建我们的第一图神经网络。关于图神经网络,可以看一下这篇博客——GRAPH CONVOLUTIONAL NETWORKS。
数据集准备
我们使用的是Cora数据集。
from torch_geometric.datasets import Planetoid
dataset = Planetoid(root='./data/Cora', name='Cora')
print(dataset)
输出:
Cora()
搭建网络模型
import torch
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = GCNConv(dataset.num_node_features, 16)
self.conv2 = GCNConv(16, dataset.num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
模型的结构包含两个GCNConv层,选择ReLU作为非线性函数,最后通过softmax输出分类结果。
模型训练和验证
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = Net().to(device)
data = dataset[0].to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=5e-4)
model.train()
for epoch in range(200):
optimizer.zero_grad()
out = model(data)
loss = F.nll_loss(out[data.train_mask], data.y[data.train_mask])
loss.backward()
optimizer.step()
model.eval()
_, pred = model(data).max(dim=1)
correct = int(pred[data.test_mask].eq(data.y[data.test_mask]).sum().item())
acc = correct / int(data.test_mask.sum())
print('Accuracy: {:.4f}'.format(acc))
输出:
Accuracy: 0.8120
3. CREATING MESSAGE PASSING NETWORKS 建立消息传递网络
将卷积神经网络中的“卷积算子”应用到图上面,核心在于neighborhood aggregation机制,或者说是message passing的机制。Aggregate Neighbours,核心思想在于基于局部网络连接来生成Node embeddings(Generate node embeddings based on local network neighborhoods)。如下面这个图:

例如图中节点A的embedding决定于其邻居节点 { B , C , D } \{B,C,D\} {B,C,D},而这些节点又受到它们各自的邻居节点的影响。图中的“黑箱”可以看成是整合其邻居节点信息的操作,它有一个很重要的属性——其操作应该是顺序(order invariant)无关的,如求和、求平均、求最大值这样的操作,可以采用神经网络来获取。这样顺序无关的聚合函数符合网络节点无序性的特征,当我们对网络节点进行重新编号时,我们的模型照样可以使用。
那么,对于每个节点来说,它的计算图就由其邻居节点的数量来决定——

模型的深度可以自己定义(Model can be of arbitrary depth):
- Nodes have embeddings at each layer
- Layer-0节点 u u u的embedding是其节点特征向量 x u x_u xu
- Layer-K embedding gets information from nodes that
are K hops away,例如Layer-1中B节点的embedding就由Layer-0中节点A的特征向量 x A x_A xA和节点C的特征向量 x C x_C xC经过神经网络计算得到。

也就是说,对于第
k
k
k层的节点
i
i
i来说,它的特征向量
x
i
(
k
)
x_i^{(k)}
xi(k)就是
x
i
(
k
)
=
γ
(
k
)
(
x
i
(
k
−
1
)
,
□
j
∈
N
(
i
)
ϕ
(
k
)
(
x
i
(
k
−
1
)
,
x
j
(
k
−
1
)
,
e
j
,
i
)
)
x_i^{(k)}=\gamma^{(k)}(x_i^{(k-1)},\square_{j \in N_{(i)}}\phi^{(k)}(x_i^{(k-1)},x_j^{(k-1)},e_{j,i}))
xi(k)=γ(k)(xi(k−1),□j∈N(i)ϕ(k)(xi(k−1),xj(k−1),ej,i))
其中 x i ( k − 1 ) ∈ R D x_i^{(k-1)} \in \Bbb{R}^D xi(k−1)∈RD是节点 i i i第 k − 1 k-1 k−1层的特征向量; e j , i ∈ R D e_{j,i} \in \Bbb{R}^D ej,i∈RD为从节点 j j j到 i i i的边的特征向量; □ \square □为一个可微的、置换不变的函数(a differentiable, permutation invariant function,就是运算和参数顺序无关,如求和函数、求均值、求最大值等); γ \gamma γ和 ϕ \phi ϕ为其他的可微函数,如多层感知器(MLPs)、神经网络等。
3.1 Message passing 基本类
PyTorch Geometric 提供了基本类—— MessagePassing ,可以实现上述的图神经网络,来实现消息传递或消息聚集(which helps in creating such kinds of message passing graph neural networks by automatically taking care of message propagation. )
MessagePassing类有三个参数:
- aggr (string, optional) ——指定采用的置换不变函数,默认是
add,可以定义为add、mean、max和None。 - **flow (string, optional) **——指定信息传递的反向,默认是
source_to_target,还可以设置为target_to_source。 - **node_dim (int, optional) **——The axis along which to propagate. 默认是-2。
同时,MessagePassing提供了一些比较实用的方法:
MessagePassing.propagate(edge_index, size=None, **kwargs)MessagePassing.message(...)——这个函数定义了对于每个节点对 ( x i , x j ) (x_i, x_j) (xi,xj),怎样生成信息(message)。MessagePassing.update(aggr_out, ...)——这个函数利用聚合好的信息(message)更新每个节点的 embedding。
3.2 GCN层的实现
GCN层的数学定义如下:
x i ( k ) = ∑ j ∈ N ( i ) ⋃ { i } 1 d e g ( i ) ⋅ d e g ( j ) ⋅ ( Θ ⋅ x j ( k − 1 ) ) x_i^{(k)}=\sum_{j \in N(i) \bigcup \{i\}}\frac{1}{\sqrt{deg(i)}\cdot \sqrt{deg(j)}} \cdot (\Theta \cdot x_j^{(k-1)}) xi(k)=j∈N(i)⋃{i}∑deg(i)⋅deg(j)1⋅(Θ⋅xj(k−1))
首先通过权值矩阵对相邻节点特征 Θ \Theta Θ进行变换,按照两个节点 i i i和 j j j的度进行标准化,然后求和,得到这一层节点 i i i的embedding向量。这个过程通常有5个步骤:
- Add self-loops to the adjacency matrix. 主要通过
torch_geometric.utils.add_self_loops方法实现。这一步相当于是对邻接矩阵的预处理,即增加节点的自身循环。也就是把邻接矩阵上的 a i i a_{ii} aii全部设置为1。在pytorch geometric里面,是利用edge_index来实现。如果是有权图,则新增的自循环边以fill_value作为权。该方法最后返回两个值——`edge_index, edge_weight``。

import torch
from torch_geometric.utils import add_self_loops, degree
x = torch.tensor([[-1], [0], [1]], dtype=torch.float)
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
print("original edge_index ")
print(edge_index)
edge_index, _ = add_self_loops(edge_index, num_nodes=x.size(0))
print("new edge_index")
print(edge_index)
最后输出:
original edge_index
tensor([[0, 1, 1, 2],
[1, 0, 2, 1]])
new edge_index
tensor([[0, 1, 1, 2, 0, 1, 2],
[1, 0, 2, 1, 0, 1, 2]])
-
Linearly transform node feature matrix. 第二步是对节点的特征矩阵进行线性变换。主要通过一个线性层
torch.nn.Linear实现。 -
Compute normalization coefficients. 第三步是对变换后的节点特征进行标准化。节点的度可以通过
torch_geometric.utils.degree实现。
import torch
from torch_geometric.utils import add_self_loops, degree
x = torch.tensor([[-1], [0], [1]], dtype=torch.float)
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
print("original edge_index ")
print(edge_index)
edge_index, _ = add_self_loops(edge_index, num_nodes=x.size(0))
print("new edge_index")
print(edge_index)
row, col = edge_index
deg = degree(col, x.size(0), dtype=x.dtype)
print(deg)
deg_inv_sqrt = deg.pow(-0.5)
print(deg_inv_sqrt)
print(deg_inv_sqrt[row])
print(deg_inv_sqrt[col])
最后输出:
original edge_index
tensor([[0, 1, 1, 2],
[1, 0, 2, 1]])
new edge_index
tensor([[0, 1, 1, 2, 0, 1, 2],
[1, 0, 2, 1, 0, 1, 2]])
tensor([2., 3., 2.])
tensor([0.7071, 0.5774, 0.7071])
tensor([0.7071, 0.5774, 0.5774, 0.7071, 0.7071, 0.5774, 0.7071])
tensor([0.5774, 0.7071, 0.7071, 0.5774, 0.7071, 0.5774, 0.7071])
-
Normalize node features in ϕ \phi ϕ.
-
Sum up neighboring node features (“add” aggregation).
前面三步是message passing之前的预操作,第四、第五步可以采用MessagePassing类里面的方法完成。
完整的代码如下:
import torch
from torch_geometric.nn import MessagePassing
from torch_geometric.utils import add_self_loops, degree
class GCNConv(MessagePassing):
def __init__(self, in_channels, out_channels):
super(GCNConv, self).__init__(aggr='add') # "Add" aggregation (Step 5).
self.lin = torch.nn.Linear(in_channels, out_channels)
def forward(self, x, edge_index):
# x has shape [N, in_channels]
# edge_index has shape [2, E]
# Step 1: Add self-loops to the adjacency matrix.
edge_index, _ = add_self_loops(edge_index, num_nodes=x.size(0))
# Step 2: Linearly transform node feature matrix.
x = self.lin(x)
# Step 3: Compute normalization.
row, col = edge_index
deg = degree(col, x.size(0), dtype=x.dtype)
deg_inv_sqrt = deg.pow(-0.5)
norm = deg_inv_sqrt[row] * deg_inv_sqrt[col]
# Step 4-5: Start propagating messages.
return self.propagate(edge_index, x=x, norm=norm)
def message(self, x_j, norm):
# x_j has shape [E, out_channels]
# Step 4: Normalize node features.
return norm.view(-1, 1) * x_j
我们建立的这个神经网络模型GCNConv继承于基础类MessagePassing,并且采用求和函数作为
□
\square
□函数,通过super(GCNConv, self).__init__(aggr='add')来初始化。在完成1-3步之后,调用MessagePassing中的propagate()方法来完成4-5步,进行信息传播。message函数用于对节点的邻居节点的信息进行标准化。
我们可以通过一个案例来感受一下这个模型的输入和输出。
x = torch.tensor(torch.rand(3,2), dtype=torch.float)
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
conv = GCNConv(2, 4)
设有上图所示的网络,网络中有三个节点,每个节点有2个特征值。并构建神经网络conv = GCNConv(2, 4)。下面是程序运行的每一步输出的结果:
x is
tensor([[0.1819, 0.1848],
[0.8479, 0.1754],
[0.7511, 0.9781]])
----Step 1: Add self-loops to the adjacency matrix.----
tensor([[0, 1, 1, 2, 0, 1, 2],
[1, 0, 2, 1, 0, 1, 2]])
----Step 2: Linearly transform node feature matrix.----
linear weight is
Parameter containing:
tensor([[-0.6532, -0.3349],
[ 0.5238, -0.5996],
[-0.6279, -0.5872],
[-0.4064, 0.5893]], requires_grad=True)
linear bias is
Parameter containing:
tensor([ 0.5966, -0.4339, 0.0263, 0.1577], requires_grad=True)
transformed x is
tensor([[ 0.4160, -0.4494, -0.1964, 0.1927],
[-0.0159, -0.0949, -0.6090, -0.0835],
[-0.2215, -0.6270, -1.0196, 0.4289]], grad_fn=<AddmmBackward>)
----Step 3: Compute normalization.----
tensor([0.4082, 0.4082, 0.4082, 0.4082, 0.5000, 0.3333, 0.5000])
----Step 4-5: Start propagating messages.----
tensor([[ 0.2015, -0.2635, -0.3468, 0.0623],
[ 0.0741, -0.4711, -0.6994, 0.2260],
[-0.1172, -0.3522, -0.7584, 0.1804]], grad_fn=<ScatterAddBackward>)

3.3 Edge Convolution 边卷积层的实现
边卷积层的数学定义如下:
x i ( k ) = max j ∈ N ( i ) h Θ ( x i ( k − 1 ) , x j ( k − 1 ) − x i ( k − 1 ) ) x_i^{(k)}=\max_{j \in N(i)} h_{\Theta}(x_i^{(k-1)},x_j^{(k-1)}-x_i^{(k-1)}) xi(k)=j∈N(i)maxhΘ(xi(k−1),xj(k−1)−xi(k−1))
其中,
h
Θ
h_{\Theta}
hΘ为多层感知机,类似于GCN,边卷积层同样继承于于基础类MessagePassing,不同在于采用max函数作为
□
\square
□函数。
边卷积层的主要理论来自于论文Dynamic Graph CNN for Learning on Point Clouds,这篇文章提出一种边卷积(EdgeConv)操作,来完成点云中点与点之间关系的建模,使得网络能够更好地学习局部和全局特征。具体可以看这两篇博客:【深度学习——点云】DGCNN(EdgeConv)和论文笔记:DGCNN(EdgeConv)。
import torch
from torch.nn import Sequential as Seq, Linear, ReLU
from torch_geometric.nn import MessagePassing
class EdgeConv(MessagePassing):
def __init__(self, in_channels, out_channels):
super(EdgeConv, self).__init__(aggr='max') # "Max" aggregation.
self.mlp = Seq(Linear(2 * in_channels, out_channels),
ReLU(),
Linear(out_channels, out_channels))
def forward(self, x, edge_index):
# x has shape [N, in_channels]
# edge_index has shape [2, E]
return self.propagate(edge_index, x=x)
def message(self, x_i, x_j):
# x_i has shape [E, in_channels]
# x_j has shape [E, in_channels]
tmp = torch.cat([x_i, x_j - x_i], dim=1) # tmp has shape [E, 2 * in_channels]
return self.mlp(tmp)
边缘卷积实际上是一种动态卷积,它使用特征空间中的最近邻重新计算每一层的图。PyTorch geometry附带一个GPU加速的批处理k-NN图形生成方法——torch_geometric.n .pool.knn_graph()。
from torch_geometric.nn import knn_graph
class DynamicEdgeConv(EdgeConv):
def __init__(self, in_channels, out_channels, k=6):
super(DynamicEdgeConv, self).__init__(in_channels, out_channels)
self.k = k
def forward(self, x, batch=None):
edge_index = knn_graph(x, self.k, batch, loop=False, flow=self.flow)
return super(DynamicEdgeConv, self).forward(x, edge_index)
4. 建立自己的数据集
PyTorch Geometric提供了两个抽象类——torch_geometric.data.Dataset和torch_geometric.data.InMemoryDataset。前者适用于不能一次性放进内存中的大数据集,后者适用于可以全部放进内存中的小数据集。
4.1 “In Memory Datasets”的创建
torch_geometric.data.InMemoryDataset有四个可选参数:
- root (string, optional) ——保存数据集的根目录。每个数据集都传递一个根文件夹,该根文件夹指示数据集应该存储在何处。将根文件夹分成两个文件夹:未处理过的数据集被保存在raw_dir目录下;已处理的数据集被保存在processed_dir目录下。
- transform (callable, optional)
- pre_transform (callable, optional)
- pre_filter (callable, optional)
建立In Memory Datasets,需要用到四个基本的方法:
raw_file_names()——返回一个包含所有未处理过的数据文件的文件名的列表。processed_file_names()——返回一个包含所有处理过的数据文件的文件名的列表。download()——下载数据到raw_dir目录下。process()——对数据的处理函数,是核心的函数之一。
下面是官方文档给出的一个示例:
import torch
from torch_geometric.data import InMemoryDataset
class MyOwnDataset(InMemoryDataset):
def __init__(self, root, transform=None, pre_transform=None):
super(MyOwnDataset, self).__init__(root, transform, pre_transform)
self.data, self.slices = torch.load(self.processed_paths[0])
@property
def raw_file_names(self):
return ['some_file_1', 'some_file_2', ...]
@property
def processed_file_names(self):
return ['data.pt']
def download(self):
# Download to `self.raw_dir`.
def process(self):
# Read data into huge `Data` list.
data_list = [...]
if self.pre_filter is not None:
data_list = [data for data in data_list if self.pre_filter(data)]
if self.pre_transform is not None:
data_list = [self.pre_transform(data) for data in data_list]
data, slices = self.collate(data_list)
torch.save((data, slices), self.processed_paths[0])
4.2 创建更大的数据集
对于无法全部放进内存中的大数据集,可以使用torch_geometric.data.Dataset。torch_geometric.data.Dataset的参数和torch_geometric.data.InMemoryDataset的一致。常用的方法如下:
len()——获取数据集中的数据量。get(idx)——获取索引为idx的数据对象。
下面是官方文档给出的一个示例:
import os.path as osp
import torch
from torch_geometric.data import Dataset
class MyOwnDataset(Dataset):
def __init__(self, root, transform=None, pre_transform=None):
super(MyOwnDataset, self).__init__(root, transform, pre_transform)
@property
def raw_file_names(self):
return ['some_file_1', 'some_file_2', ...]
@property
def processed_file_names(self):
return ['data_1.pt', 'data_2.pt', ...]
def download(self):
# Download to `self.raw_dir`.
def process(self):
i = 0
for raw_path in self.raw_paths:
# Read data from `raw_path`.
data = Data(...)
if self.pre_filter is not None and not self.pre_filter(data):
continue
if self.pre_transform is not None:
data = self.pre_transform(data)
torch.save(data, osp.join(self.processed_dir, 'data_{}.pt'.format(i)))
i += 1
def len(self):
return len(self.processed_file_names)
def get(self, idx):
data = torch.load(osp.join(self.processed_dir, 'data_{}.pt'.format(idx)))
return data

















 977
977

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









