







文章阅读前提条件以及背景需求告知
作者环境:
1. 使用 conda 环境管理工具来配置 Python 相关环境
- Python 版本为 Python 3.10.15
- Pytorch 等需求版本请参考后续内容
- CUDA 版本参考后续内容
2. 电脑系统为 Windows11(无双系统)
项目作者环境
1. 电脑系统 Ubuntu 20.04
2. Python 版本 3.10, Pytorch 1.12 and CUDA 11.3
一、项目以及配置环境
提示:一定要仔细阅读作者在项目中的 README.md 文件;以及项目发布的 FQA 网址; 真的非常有用!!
1.1 拉取项目
不讲如何安装 git , 以及 git 的使用
直接使用命令 git clone https://github.com/lipku/LiveTalking.git 完成项目的拉取;
1.2 配置环境
提示:项目作者在环境部署的时候,采用的是 以下命令:
conda create -n nerfstream python=3.10
conda activate nerfstream
conda install pytorch==1.12.1 torchvision==0.13.1 cudatoolkit=11.3 -c pytorch
pip install -r requirements.txt
作者建议仅采用 conda 完成环境的创建, Pytorch 以及相关配置命令采用 pip 进行;
conda create -n nerfstream python=3.10
conda activate nerfstream
Python 环境部署完毕后,需要进行项目需求库的安装以及部署,此项目安装难点库在于 Pytorch、Numpy;
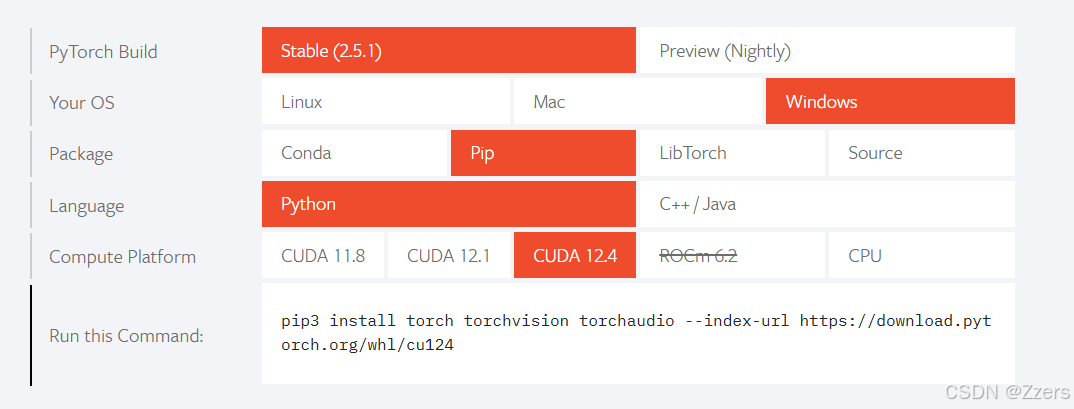
其中 Pytorch 的安装建议采用官方网站(魔法上网会快很多) https://pytorch.org/,本人使用的 Windows 版本使用如图,采用命令 pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu124,此命令一般不会遇到什么问题,C编译失败的问题可以参考其他文章作者的处理方式,非常很详细,这篇文章就不赘述;
重点: 一定不要去盲目跟着项目作者完成项目的安装,除非你与项目作者一模一样的配置条件!
坑1: 另外我选择的是 CUDA 12.4 ,那么我就去下载 CUDA12.4 就行,Windows 中想要下载 CUDA11.3(即与作者配置相同的 CUDA版本),需要强行去修改 Pytorch 、Torch 以及 cudatoolkit 的版本,因为 CUDA 11.3 根本就不支持 Windows;
二、项目运行
此处是重点!!
在项目 README.md 中 2. Quick Start 部分提及到 默认采用ernerf模型,webrtc推流到srs 所以后续我们需要接入的其实是 webrtc;
2.1运行 SRS
根据项目作者的步骤,咱一步步来
export CANDIDATE='<服务器外网ip>' #如果srs与浏览器访问在同一层级内网,不需要执行这步
docker run --rm --env CANDIDATE=$CANDIDATE \
-p 1935:1935 -p 8080:8080 -p 1985:1985 -p 8000:8000/udp \
registry.cn-hangzhou.aliyuncs.com/ossrs/srs:5 \
objs/srs -c conf/rtc.conf
这一步基本上没什么问题,正常都可以运行起来,进入下一步即可;
这里提一句,Windows 运行 docker 需要运用到 deocker-desktop 这个应用,这期间会遇到一些问题导致 docker 根本起不来,下面俩问题仅供参考
问题一:
docker-desktop 出现:Please try shutting WSL down (wsl --shutdown) and/or rebooting your computer … 错误
解决方案:
- 管理员身份打开命令行工具
1.1 可以此期间使用的命令:
1.1.1 关闭 docker Help-v:bcdedit /set hypervisorlaunchtype off
1.1.2 开启 docker Help-v:bcdedit /set hypervisorlaunchtype auto- 输入命令:netsh winsock reset
- 重启电脑
问题二:
docker-desktop 出现: Docker Desktop-WSL distro terminated abruptly … an external entity terminating WSL (e.g. running wsl–shutdown) 错误
解决方案:
- 列出已安装的 WSL 发行版 wsl --list
- 注销 Docker 相关的发行版 wsl --unregister <distro_name>
2.1 注意:注销发行版会删除所有相关的数据,所以在执行此命令之前,确认你已经备份了重要的数据或容器。- 重新启动计算机
- 重启 docker
2.2 启动数字人
python app.py 如果访问不了huggingface(需要全局魔法上网),在运行前export HF_ENDPOINT=https://hf-mirror.com
到这一步其实就是完整的运行;但作者在运行到这一步的时候,发现 app.py 程序堆栈中显示 start http server; http://<serverip>:8010/rtcpushapi.html 但是此 html 的内容怎么点击都没反应!然后去检查 docker 输出!发现了一大堆乱七八糟的东西,简单的分析了一下,发现主要分为以下几个部分:
- RS 启动信息:
- SRS/5.0.213(Bee) 表示正在运行的 SRS 版本。
- MIT 表示 SRS 是一个开源软件,采用 MIT 许可证。
- authors 列出了 SRS 的主要开发者和贡献者。
- 配置与环境信息:
- build: 2024-06-15 和 configure: --sanitizer=off --gb28181=on 等详细配置项说明了 SRS 是如何构建和配置的。
- uname: Linux buildkitsandbox 表示容器内运行的是 Linux 系统,具体是 Ubuntu 20.04。
- 网络与设备配置:
- eth0 ipv4 0x11043 172.17.0.2:显示容器内的网络接口(eth0)的 IP 地址为 172.17.0.2。
- stats network use index=0, ip=172.17.0.2 和 stats disk not configed, disk iops disabled 分别是网络和磁盘的状态。
- 功能开启信息:
- rch:on, dash:on, hls:on, srt:on 等显示 SRS 启用了多种流媒体功能,如 HLS(HTTP Live Streaming)和 SRT(Secure Reliable Transport)。
- 服务监听端口:
- RTMP listen at tcp://0.0.0.0:1935 表示 RTMP 流媒体协议正在监听 1935 端口。
- HTTP-API listen at tcp://0.0.0.0:1985 和 HTTP-Server listen at tcp://0.0.0.0:8080 表示 HTTP API 和 HTTP 服务器分别监听 1985 和 8080 端口。
- rtc listen at udp://0.0.0.0:8000:RTC(Web Real-Time Communication)服务监听 8000 端口。
- 日志和连接管理:
- Thread #2: run with tid=7, entry=0x55da7cb8a620 表示正在启动不同的线程来处理流媒体的工作。
- CircuitBreaker: enabled=1, high=2x90, critical=1x95, dying=5x99 这是用于监控流媒体服务的断路器设置,帮助系统在负载过高时进行保护。
- RTC 会话信息:
- 日志中显示了 RTC 会话的初始化过程,如音视频流的设置和 DTLS 加密。
- RTC username=81093469:17UW 等显示了 RTC 流的基本信息,记录了会话和流媒体的相关参数。
总结:所有的网络监听都是正常的,但是为什么会访问不了呢?其实就是因为防火墙…关了就好了
然后继续排查代码,这块回顾本文章 二、项目运行 开头提到的重点,项目作者默认采用ernerf模型,webrtc推流到srs ,那为什么采用的是 rtcpushapi.html 呢,这块发现代码 app.py 中有段默认代码 parser.add_argument('--transport', type=str, default='rtcpush') # rtmp webrtc rtcpush ,此处是配置 app.py 启动时需要的相关参数,既然主要使用 webrtc 推送到 srs 那么我们就继续完成跟栈,步骤如下
- 根据当前输出内容完成跟栈,发现当前输出是由
opt.transport完成 ,而且只有当值为rtmp以及rtcpush才会切入到其他流,这样看来我们只需要找到rtcpush传输值的位置,并进行修改即可;
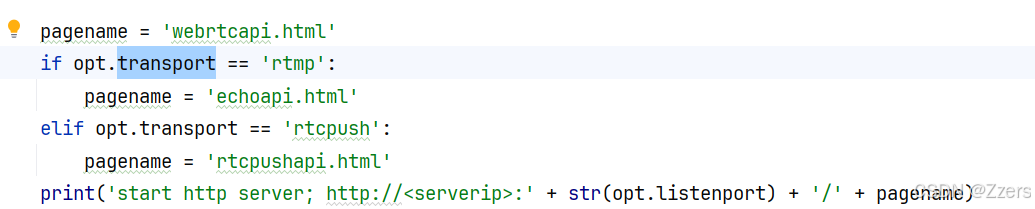 2. 修改代码
2. 修改代码 parser.add_argument('--transport', type=str, default='rtcpush') # rtmp webrtc rtcpush将默认流修改为 None,或者其他非rtmp以及rtcpush的值;再次运行app.py可以发现结果产生变化

接着在运行代码 app.py 就好了~
就到这里啦,感谢阅读~


















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









