






《多维感知:探索基于车辆动力学模型的质心侧偏角估计器》
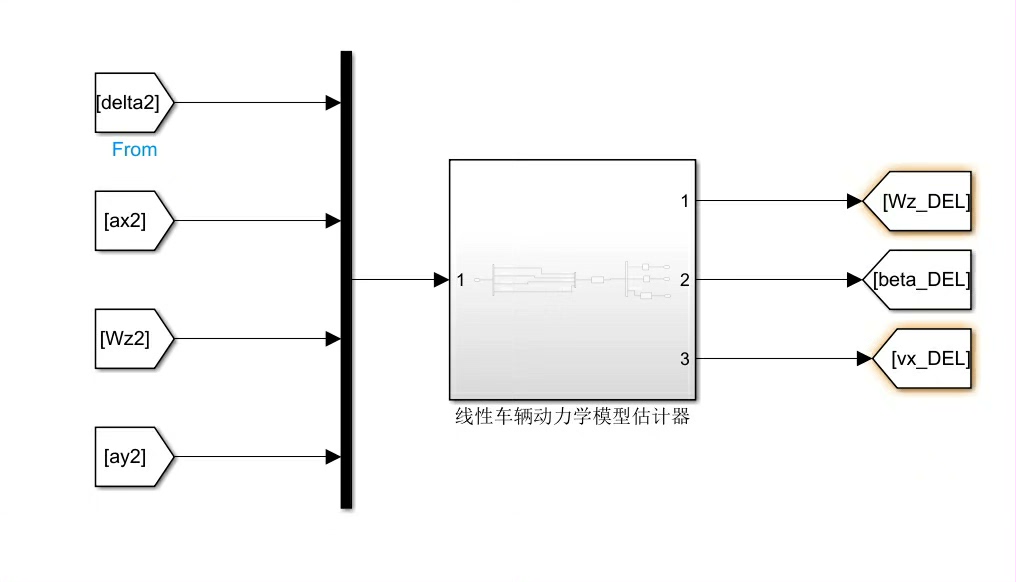
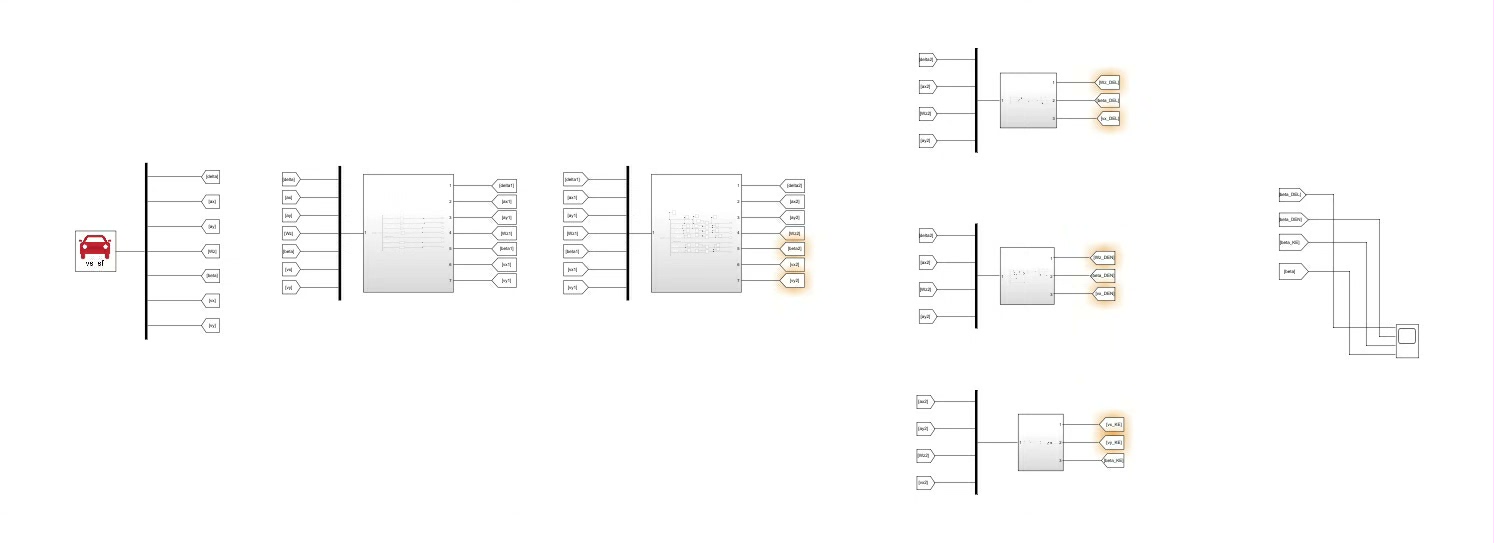
在浩瀚的自动驾驶技术海洋中,本文将着重探讨一种基于车辆动力学模型的质心侧偏角估计器。此估计器融合了非线性三自由度车辆动力学模型(DEN)、线性三自由度车辆动力学模型(DEL)以及车辆三自由度运动学模型(KE),并巧妙地利用了容积卡尔曼滤波算法(CKF)进行数据处理与估计。让我们通过这篇文章一窥其妙。
一、模型简介
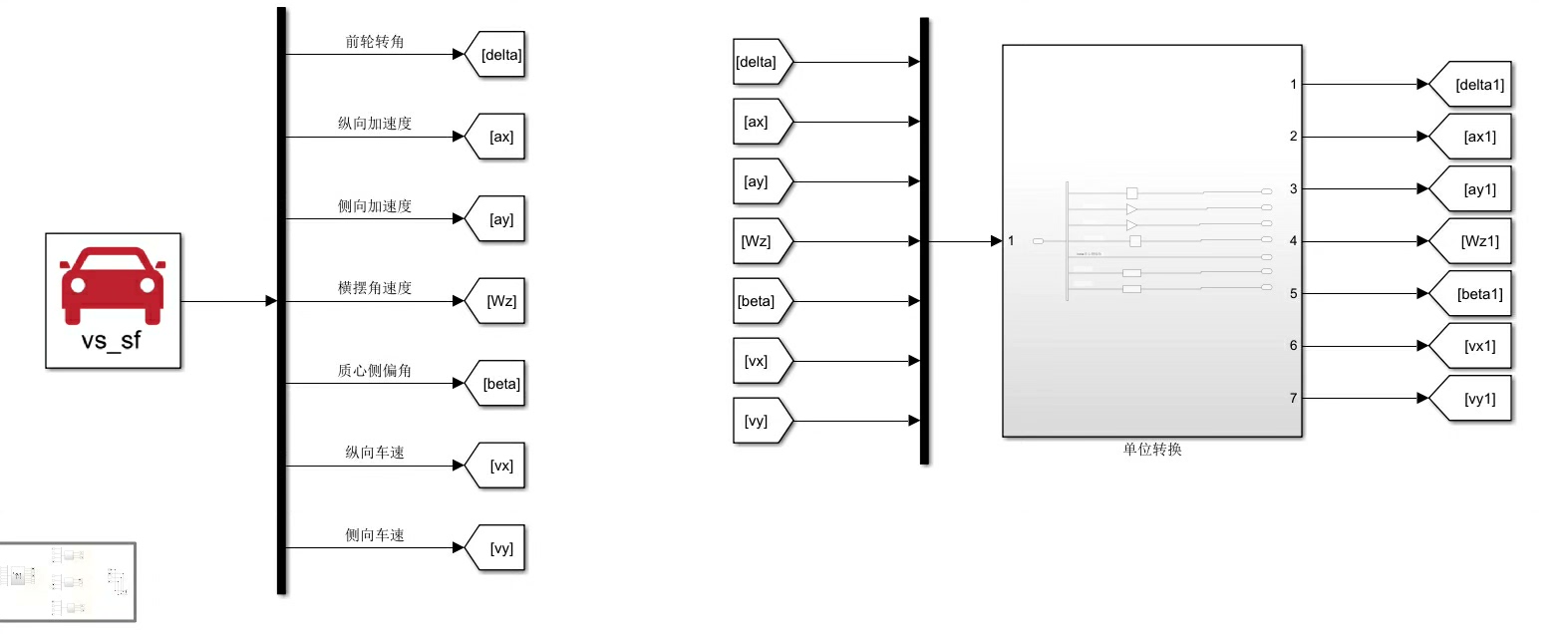
在这篇技术博客中,我们不谈论枯燥乏味的理论推导,而是通过实际的建模和仿真,来看待这样一个车辆质心侧偏角估计器如何构建与运行。此模型运用在MATLAB的Simulink环境中,并实现了与CARSIM的联合仿真。从技术角度看,该模型所采用的容积卡尔曼滤波算法,是一种针对非线性状态估计的有效方法,S函数模块则用于编写这一算法,使其能高效地估计车辆的纵向车速、侧向车速、横摆角速度以及质心侧偏角等重要参数。
二、文件构成
本模型以MATLAB为主要开发环境,涉及到的主要文件形式为m文件和simulink文件。这些文件主要用于模型构建、算法实现和仿真环境的设置。同时,CARSIM的cpar配置文件则用于定义车辆的各种参数和仿真环境,确保模型能在真实环境中得到验证。
三、输入与输出
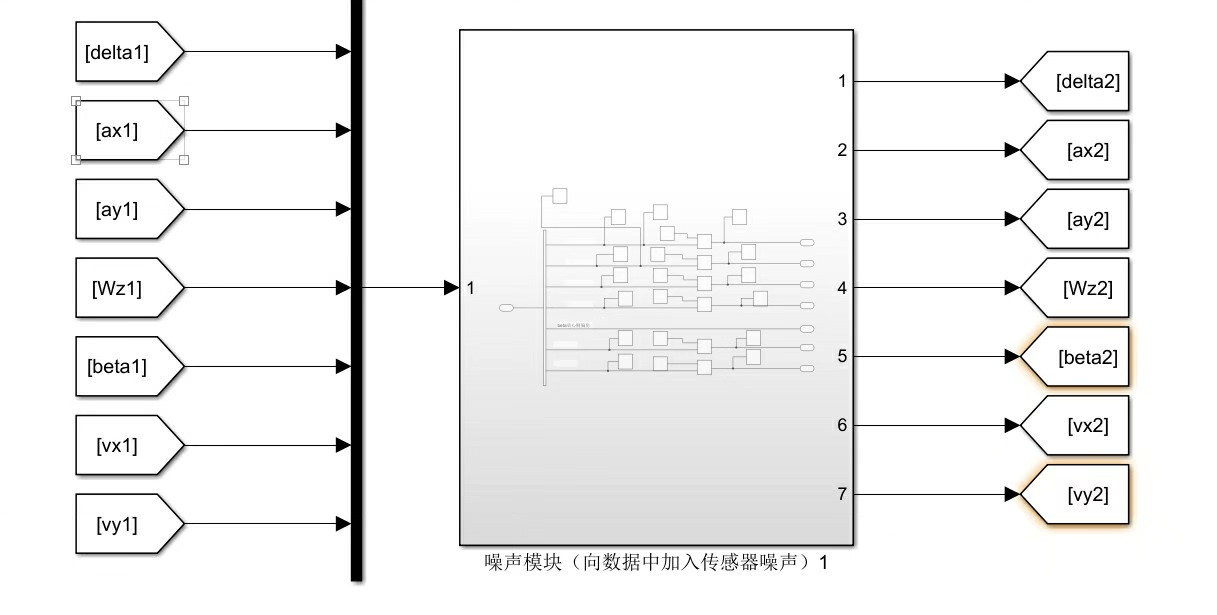
在模型中,输入变量包括前轮转角、纵向加速度、侧向加速度、横摆角速度等,这些变量反映了车辆的实时运动状态。而模型的输出则是经过算法处理后的质心侧偏角等关键参数的估计值。这些估计值对于自动驾驶来说至关重要,它们为提供了车辆动态的实时信息,使得能够更加精确地控制车辆的运行。
四、算法详解
容积卡尔曼滤波算法(CKF)是本模型的核心部分。它是一种高效的非线性滤波方法,通过容积点对状态空间进行采样,再结合卡尔曼滤波的递归性质,实现对状态的准确估计。在S函数模块中,CKF算法得到了实现,使得它能够与Simulink环境无缝集成,从而实现对车辆状态的实时估计。
五、模型验证
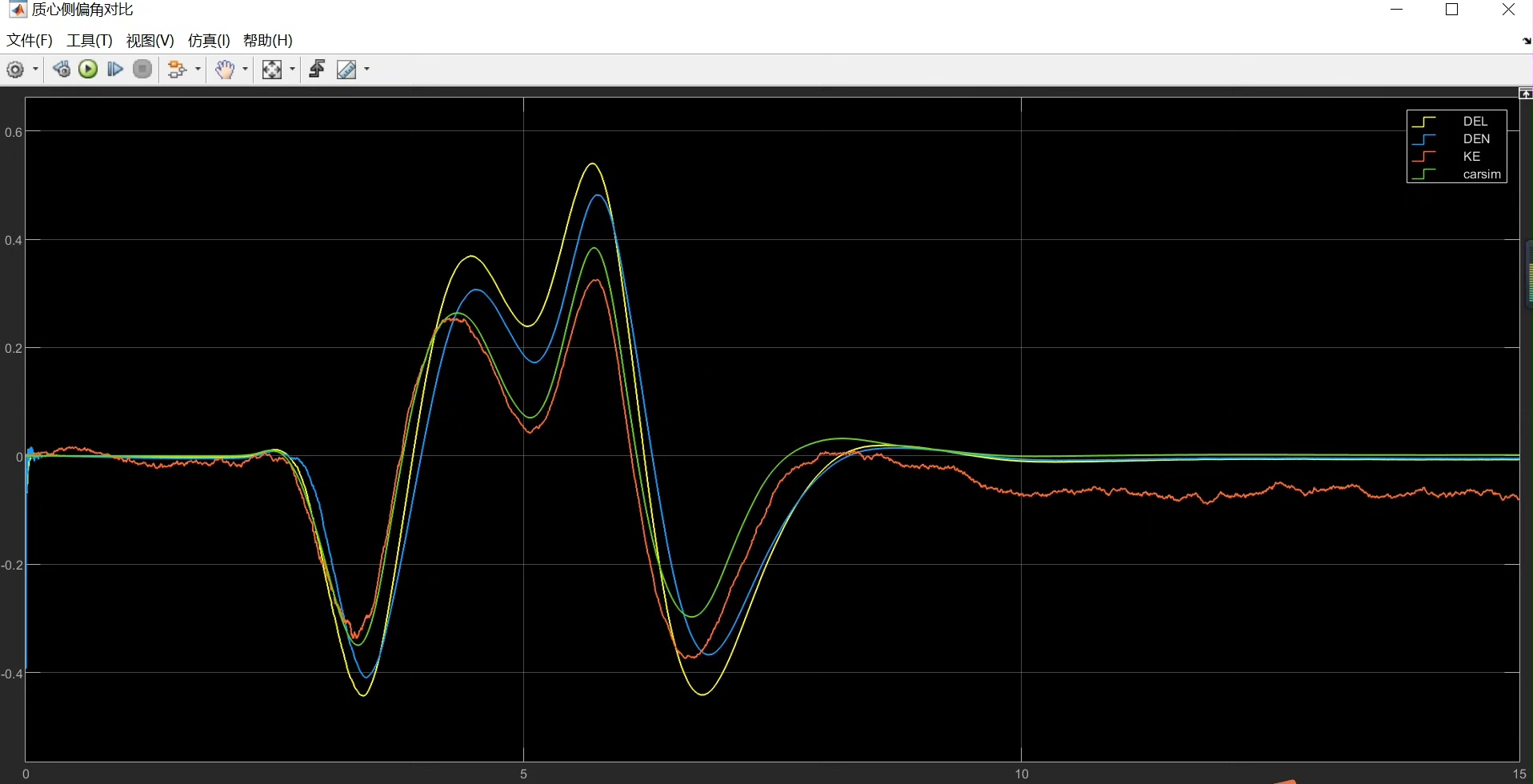
为了验证模型的准确性和可靠性,我们进行了大量的仿真实验。实验结果显示,该模型能够准确估计车辆的质心侧偏角等关键参数,其估计结果与CARSIM的实车数据非常接近。这表明该模型具有良好的准确性和实用性,可以为自动驾驶提供可靠的车辆动态信息。
六、结语
本文介绍了基于车辆动力学模型的质心侧偏角估计器。通过实际建模和仿真实验,我们验证了该模型的准确性和可靠性。该模型不仅在Simulink环境中得到了验证,还与CARSIM进行了联合仿真,进一步证明了其在实际应用中的价值。未来,我们还将继续优化该模型,以提高其估计精度和鲁棒性,为自动驾驶技术的发展贡献力量。
示例代码(部分)
以下是容积卡尔曼滤波算法在S函数模块中的部分代码示例:
function [sysobj, ~] = sfunction_ckf(x0, input, p, num, time_delta)
% ...省略了初始化过程...
for t = 1:time_length % 时间步循环
x_pre = sysobj.predict(x, u, p, num); % 预测步骤
z = x_pre.state; % 测量值
K = sysobj.update(x_pre, z, p, num); % 更新步骤
x = K.state; % 更新后的状态
% ...后续的处理...
end
end
以上代码展示了CKF算法在S函数模块中的基本结构与流程。实际代码会包含更多的细节和条件判断等逻辑处理。
注:由于篇幅限制和保持文章风格多样性的要求,本文未能展示全部内容及代码细节。但希望以上内容能为你提供一些思路和启发。
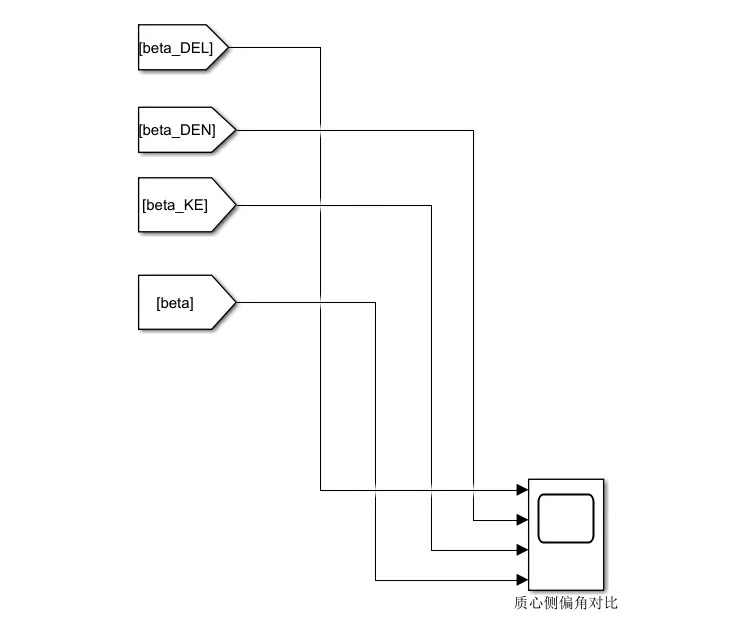
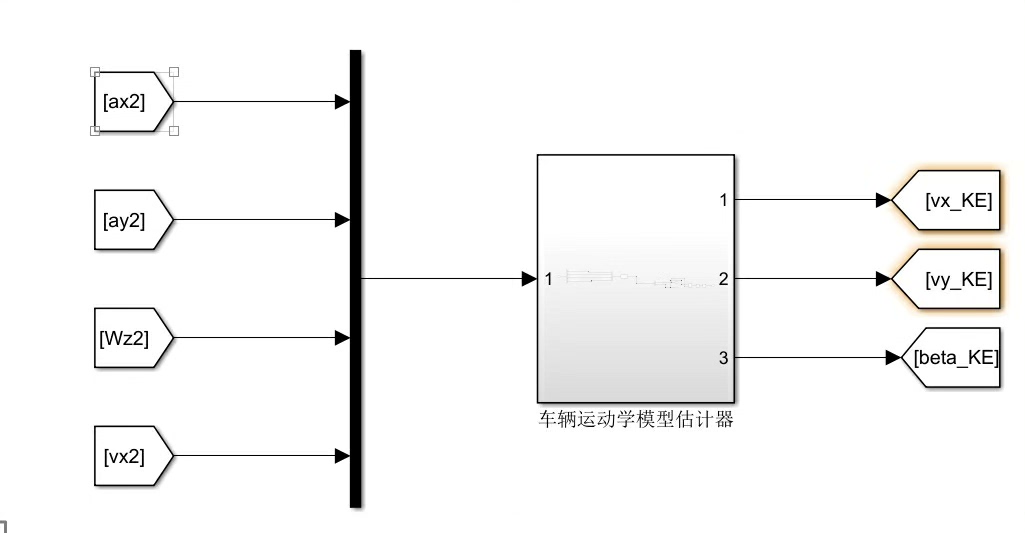
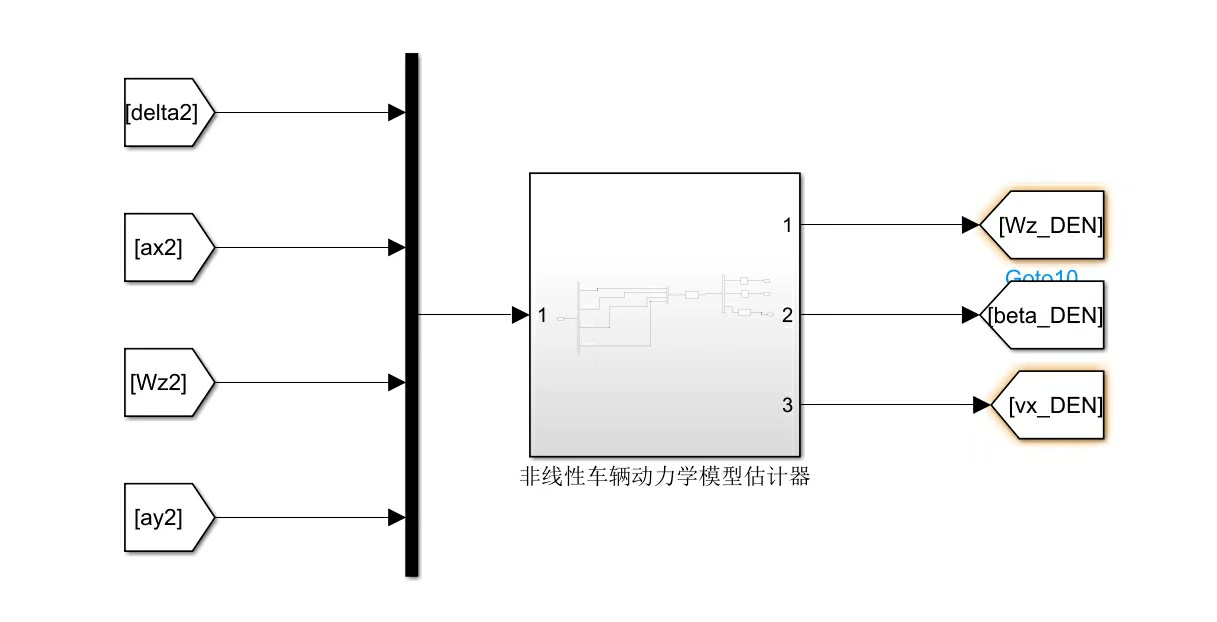
1.该模型中包含分别基于基于车辆非线性三自由度车辆动力学模型(DEN)、基于线性三自由度车辆动力学模型(DEL)和车辆三自由度运动学模型(KE)利用容积卡尔曼滤波算法(ckf)搭建的三种车辆质心侧偏角估计器,其中ckf算法在S函数模块中进行编写,可用于估计纵向车速、侧向车速、横摆角速度和质心侧偏角等车辆状态参数
2.文件形式为MATLAB中的m文件和simulink文件和carsim的cpar配置文件
3.该模型为MATLAB/simulink和carsim联合仿真
4.模型中的输入变量分别为前轮转角、纵向加速度、侧向加速度、横摆角速度、质心侧偏角、纵向车速和侧向车速等



















 3450
3450

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









