






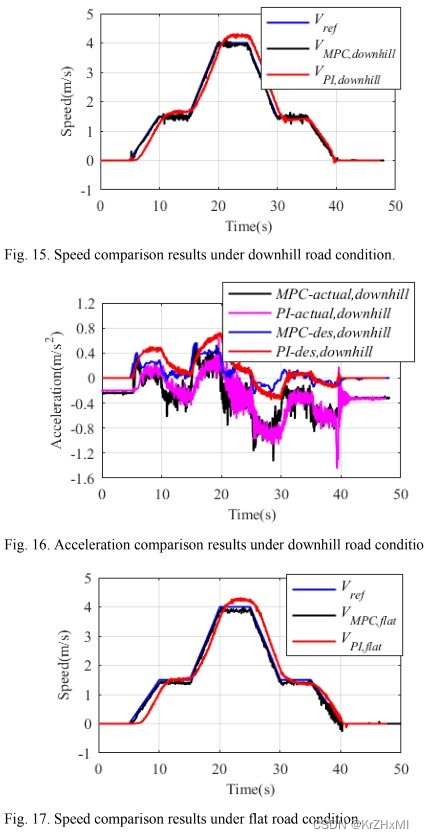
基于模型预测MPC实现的车速控制(如图),控制目标为电动汽车,采用上下层控制器控制,上层mpc产生期望的加速度,下层根据加速度产生期望的扭矩控制车速,同时该算法可直接用于代码生成(本人已经做过实车实验对比MPC和PID,效果良好, 如图所示),后续可以用于车速需求的控制(如acc,轨迹跟踪等)。
有对应文章学习(如图)和文件说明。

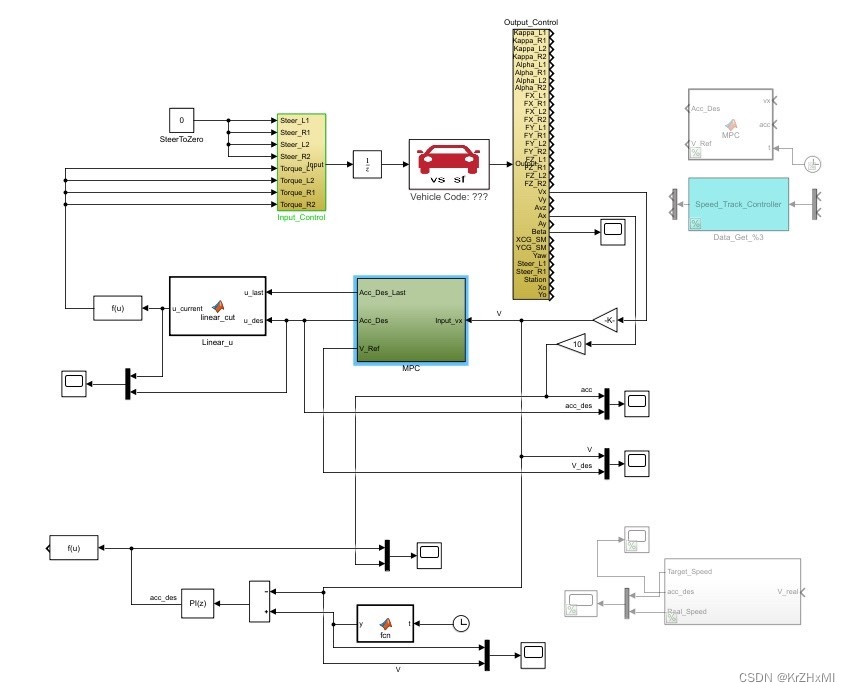


基于模型预测MPC实现的车速控制
摘要:本文将探讨基于模型预测控制(Model Predictive Control,MPC)算法实现的车速控制。我们以电动汽车为例,采用上下层控制器的结构进行控制。上层控制器通过MPC算法产生期望的加速度,下层控制器根据这个加速度生成期望的扭矩以控制车速。本文还将介绍如何将该算法直接应用于代码生成,并通过实车实验对比MPC和PID算法的效果。最后,我们将探讨这一算法在车速需求控制(如自适应巡航控制和轨迹跟踪)方面的应用。
-
引言 车速控制是现代汽车控制系统中的关键问题之一。实现精确的车速控制对提高车辆驾驶性能、安全性和舒适性具有重要意义。近年来,模型预测控制算法在车速控制领域取得了广泛应用,其相对于传统的比例-积分-微分(PID)控制算法具有更好的性能。
-
算法原理 2.1 上层控制器:MPC算法 MPC算法基于车辆动力学模型对未来时间窗口内的车速进行预测,并以此为基础生成期望的加速度。通过调节MPC算法的参数,可以实现对车辆加速度的精确控制。
2.2 下层控制器:扭矩控制 下层控制器根据上层控制器产生的加速度,通过电机控制系统生成相应的扭矩,以实现对车速的控制。该控制器采用了先进的控制算法,可在较短的时间内实现车速的响应和稳定控制。
-
代码生成 为了将MPC算法应用于实际车辆控制系统,我们需要将其转化为可执行的代码。通过将MPC算法与硬件平台进行适配,并对算法进行优化,可以实现高效、稳定的车速控制。
-
实车实验及对比 为了验证MPC算法在车速控制方面的有效性,我们进行了实车实验,并将MPC算法与传统的PID控制算法进行了对比。实验结果表明,MPC算法在车速控制性能上明显优于PID算法,具有更好的稳定性和精确性。
-
车速需求控制的应用 除了基本的车速控制,MPC算法还可以应用于车速需求控制领域。例如,我们可以通过调节MPC算法的目标参数,实现自适应巡航控制,使车辆在不同的道路条件下保持恰当的车速。此外,MPC算法也可以用于轨迹跟踪,实现车辆在指定轨迹上的精确控制。
-
结论 本文详细介绍了基于模型预测MPC实现的车速控制算法,并对其进行了实车实验验证。实验结果表明,MPC算法在车速控制方面具有优异的性能,相比传统的PID控制算法更加稳定和精确。同时,本文还探讨了MPC算法在车速需求控制方面的应用,展示了其在自适应巡航控制和轨迹跟踪等方面的潜力。这一算法对于提高车辆驾驶性能和安全性具有重要意义,将为未来的汽车控制系统提供更加高效、精确的车速控制解决方案。
相关代码,程序地址:http://imgcs.cn/lanzoun/684105509899.html















 255
255











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









