






matlab 多智能体系统编队控制仿真,非线性,一致性,领导跟随控制,有限时间控制等
ID:61599637624085488
爱_会消失吗
近年来,多智能体系统在控制领域中扮演着越来越重要的角色。多智能体系统是由多个个体组成的集体,这些个体之间通过交互和协作来实现共同的目标。在实际应用中,多智能体系统的控制问题变得越来越复杂,特别是在非线性、一致性、领导跟随和有限时间这些方面。
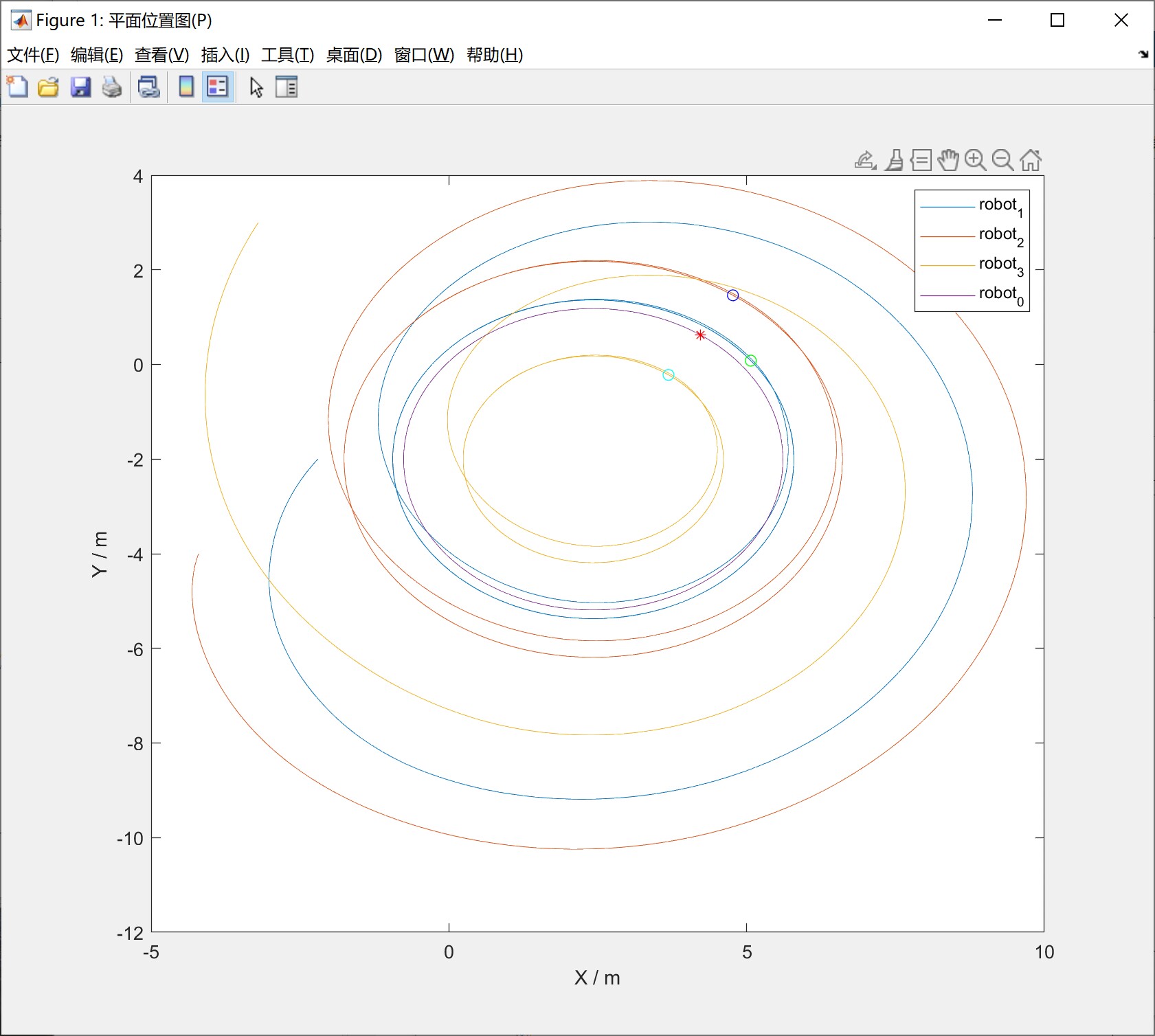
MATLAB是一个非常强大的工具,能够用于多智能体系统的建模和仿真。在多智能体系统中,编队控制是一种重要的技术,旨在使多个个体按照特定的形状和运动模式进行集体行动。编队控制的目标是使所有个体保持一定的间距和相对位置关系,以实现协同工作和任务完成。
在非线性多智能体系统中,个体之间的相互作用往往是非线性的。这就需要采用适当的控制策略来处理这些非线性因素,并实现编队控制。一种常用的方法是使用模型预测控制(MPC)算法,它可以将非线性系统转化为线性系统,并设计出最优的控制器。通过使用MATLAB中的MPC工具箱,可以轻松地实现非线性多智能体系统的编队控制。
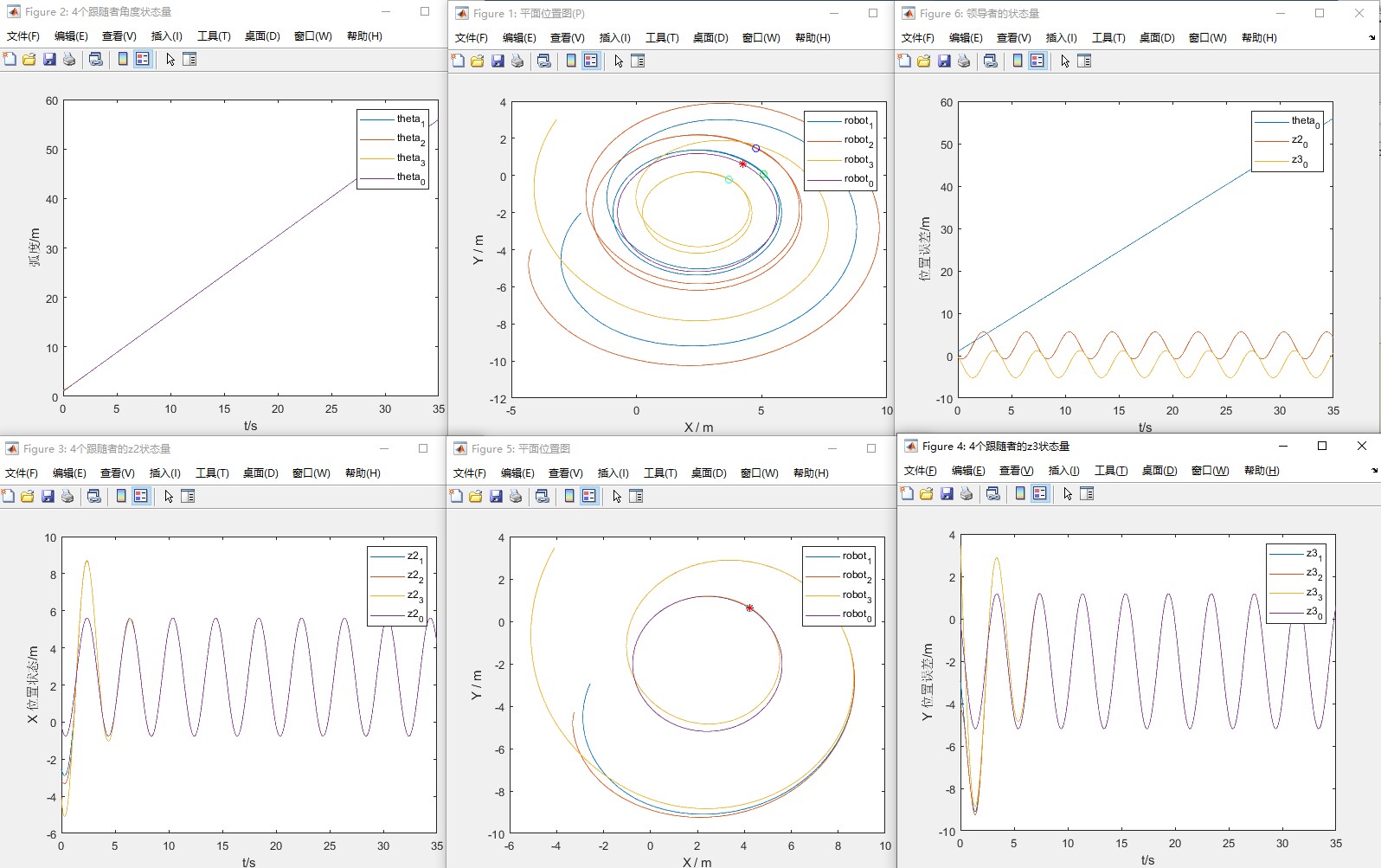
另一个重要的问题是实现编队内个体之间的一致性。一致性控制的目标是使所有个体的状态和行为趋于一致,以实现集体行动。在MATLAB中,可以使用一致性协议算法来实现编队内个体之间的一致性。该算法基于个体之间的相互作用和信息交换,通过调整个体的状态和控制输入,使编队中的个体逐渐趋于一致。
此外,领导跟随控制也是多智能体系统中的一个重要问题。在编队中,通常会有一个领导个体,其他个体需要跟随领导个体的运动和行为。领导跟随控制的目标是使跟随者个体能够准确地复制领导者的轨迹和动作。在MATLAB中,可以使用模型预测控制算法来实现领导跟随控制。
此外,有限时间控制也是多智能体系统中的一个关键问题。有限时间控制的目标是在有限的时间内使多个个体达到指定的状态或完成特定的任务。在MATLAB中,可以使用优化算法和最优控制方法来实现有限时间控制。通过适当的控制策略和参数调整,可以在有限时间内实现多智能体系统的快速控制和响应。
综上所述,MATLAB在多智能体系统编队控制仿真中具有重要的作用。通过使用MATLAB和相关工具箱,可以轻松地实现非线性、一致性、领导跟随和有限时间等多智能体系统的控制。这将为实际应用中的多智能体系统提供有效的控制策略和方法,推动多智能体系统在各个领域的应用和发展。
相关的代码,程序地址如下:http://imgcs.cn/637624085488.html
















 392
392

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









