






自定义障碍物,无人驾驶基于mpc的轨迹重规划跟踪,carsim,similink。

自定义障碍物在无人驾驶技术中扮演着至关重要的角色。它们作为环境中的动态元素,对于车辆行驶路径的规划和跟踪至关重要。而基于模型预测控制(Model Predictive Control,MPC)的轨迹重规划和跟踪技术是实现无人驾驶的关键之一。在本文中,我们将探讨基于MPC的轨迹重规划跟踪算法,并且结合Carsim和Simulink进行仿真验证。
首先,让我们来了解一下自定义障碍物的概念。自定义障碍物是指车辆行驶过程中遇到的动态环境元素,其位置和运动状态会随着时间发生变化。这些障碍物可能包括其他车辆、行人、自行车等。为了保证车辆安全行驶,无人驾驶系统需要对这些自定义障碍物进行感知和预测,并将其考虑进轨迹规划和跟踪的过程中。
基于MPC的轨迹重规划跟踪算法可以帮助无人驾驶车辆实现动态路径规划和跟踪。MPC是一种优化控制方法,它通过预测模型对系统未来的行为进行建模,并在每个时间步上通过解决一个优化问题来生成最优控制策略。在无人驾驶中,MPC可以根据车辆动力学模型和环境感知信息,预测车辆未来的行驶轨迹,并生成最优的控制指令。
在轨迹重规划过程中,自定义障碍物的信息是必不可少的。通过车辆的传感器系统,如激光雷达、摄像头等,可以获取障碍物的位置、速度等信息。这些信息被传递给MPC算法,使其能够准确地预测障碍物未来的运动轨迹。基于预测的障碍物轨迹,MPC可以进行路径重规划,以避开障碍物并确保车辆的安全行驶。
在轨迹跟踪过程中,MPC可以根据实际车辆状态和控制指令对车辆进行动态调整。通过实时测量车辆状态,并与预测的轨迹进行比较,可以对控制指令进行修正,以确保车辆能够准确地沿着规划的路径行驶。这种基于MPC的轨迹跟踪算法可以提高无人驾驶车辆的行驶稳定性和精确性。
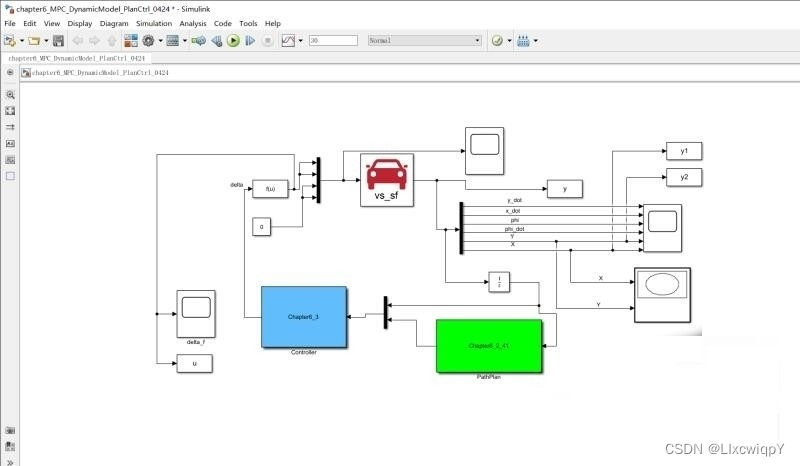
为了验证基于MPC的轨迹重规划跟踪算法的性能,我们使用Carsim和Simulink进行了仿真实验。Carsim是一款用于车辆动力学仿真的工具,Simulink是一款用于系统建模和控制设计的工具。通过将MPC算法与Carsim和Simulink相结合,我们可以对无人驾驶车辆的轨迹规划和跟踪性能进行可靠的评估。
综上所述,自定义障碍物在无人驾驶技术中扮演着重要角色,而基于MPC的轨迹重规划跟踪算法则是实现无人驾驶的关键之一。通过将自定义障碍物的信息与MPC算法相结合,可以实现动态路径规划和跟踪,从而提高无人驾驶车辆的行驶安全性和精确性。通过Carsim和Simulink的仿真验证,可以进一步验证该算法的性能和可靠性。未来,我们希望这种基于MPC的轨迹重规划跟踪算法能够在实际无人驾驶系统中得到广泛应用,并为无人驾驶技术的发展做出更大的贡献。
相关代码,程序地址:http://imgcs.cn/lanzoun/672985941353.html















 444
444











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









