




论文题目:可见热微小目标检测:基准数据集和基线
期刊:TPAMI
摘要:可见热小物体检测(RGBT SOD)是一项重要但具有挑战性的任务,具有广泛的应用,包括视频监控,交通监控,搜索和救援。然而,现有的研究主要集中在可见光或热态,而对rgbsod的研究很少。虽然已经开发了一些RGBT数据集,但由于数量不足、多样性有限、应用单一、图像不对齐、目标尺寸大等问题,无法为评价RGBT SOD算法提供一个公正的基准。在本文中,我们构建了第一个具有高多样性的rgbtsod(即rgbttiny)的大规模基准测试,包括115对序列,93 K帧和1.2 M手工注释。RGBT-Tiny包含丰富的对象(7类)和高多样性的场景(8类,涵盖不同的光照和密度变化)。请注意,超过81%的对象小于16×16,我们提供了配对的边界框注释和跟踪ID,为广泛的应用提供了极具挑战性的基准测试,例如RGBT图像融合,物体检测和跟踪。此外,我们提出了一种尺度自适应适应度(SAFit)测量,该测量在大小对象上都表现出高鲁棒性。所提出的SAFit可以提供合理的性能评价,提高检测性能。基于提出的RGBT- tiny数据集,对IoU和SAFit指标进行了广泛的评估,包括30种最新的最先进算法,涵盖四种不同类型(即可见通用物体检测、可见超氧化物歧义、热超氧化物歧义和RGBT物体检测)。
RGBT-Tiny:开启可见光-热红外小目标检测新纪元
引言
想象一下,在夜晚的城市道路上,无人机需要同时检测出几个像素大小的行人;在海上搜救任务中,需要从复杂背景中快速识别出远处的小船。这些场景对计算机视觉提出了极高的挑战:目标极小、光照复杂、背景干扰严重。如何让机器在这种极端条件下也能"看清"世界?
近日,国防科技大学的研究团队在IEEE TPAMI 2025上发表了一篇重要论文,提出了首个大规模可见光-热红外(RGBT)小目标检测基准数据集RGBT-Tiny,为解决这一难题提供了全新的思路和工具。
为什么需要RGBT-Tiny?
现有研究的三大痛点
1. 单打独斗的模态研究
传统研究要么专注于可见光图像,要么研究热红外图像,很少有人探索两者结合的潜力。就像只用一只眼睛看世界,我们错过了立体视觉带来的深度信息。可见光相机能捕捉丰富的纹理和色彩,但在夜间或恶劣天气下"失明";热红外相机不受光照限制,但缺少细节信息。将两者结合,才能实现真正的全天候感知。
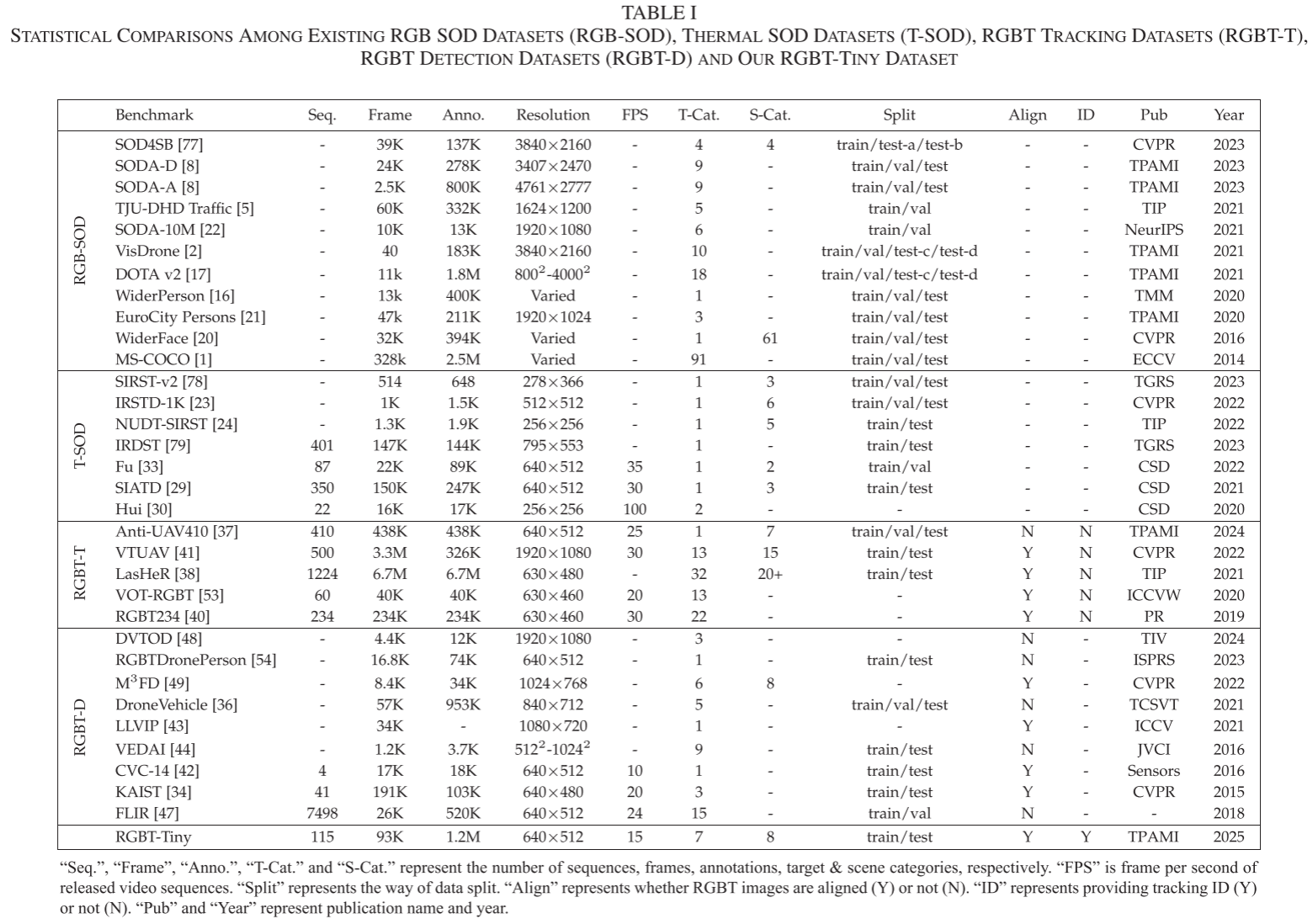
2. 数据集的"先天不足"
虽然已有一些RGBT数据集,但它们存在明显的局限性:
- 数量少:难以支撑深度学习模型的训练需求
- 目标太大:现有数据集中的目标往往占据较大像素区域,不适合真正的小目标场景
- 场景单一:缺乏足够的多样性
- 未对齐:可见光和热红外图像未经精确配准,影响融合效果
3. 评价指标的"偏见"
传统的IoU(交并比)指标对小目标"过于严格"。一个8×8像素的目标,仅仅2个像素的偏差就会导致IoU从1.0骤降至0.39!这种低容忍度使得我们难以客观评价小目标检测算法的真实性能。
RGBT-Tiny数据集:数字背后的故事
规模与质量并重
RGBT-Tiny数据集的规模令人印象深刻:
- 115个配对视频序列
- 93,000帧高质量图像
- 1,200,000个精确标注
- 超过2000小时的人工审核
但更重要的是其质量和多样性。
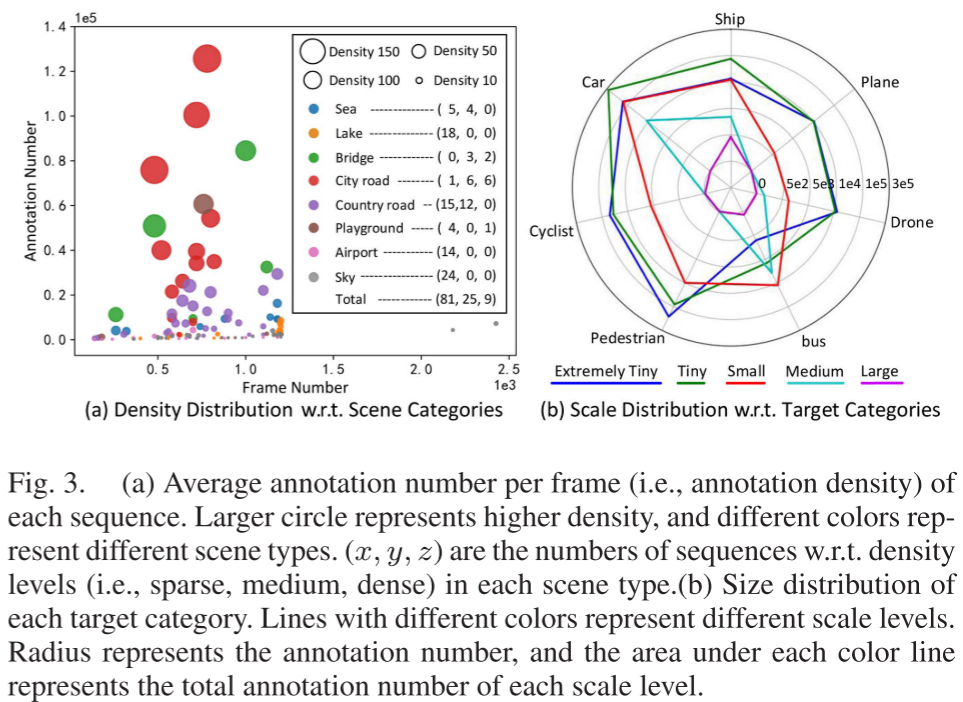
真正的"Tiny"
数据集中超过81%的目标小于16×16像素,97%的目标在小尺度范围内。这些目标被进一步细分为三个级别:
- 极小(Extremely Tiny):1²~8²像素
- 微小(Tiny):8²~16²像素
- 小(Small):16²~32²像素
这种尺度分布真实反映了实际应用场景,如无人机高空巡航、远距离监控等。
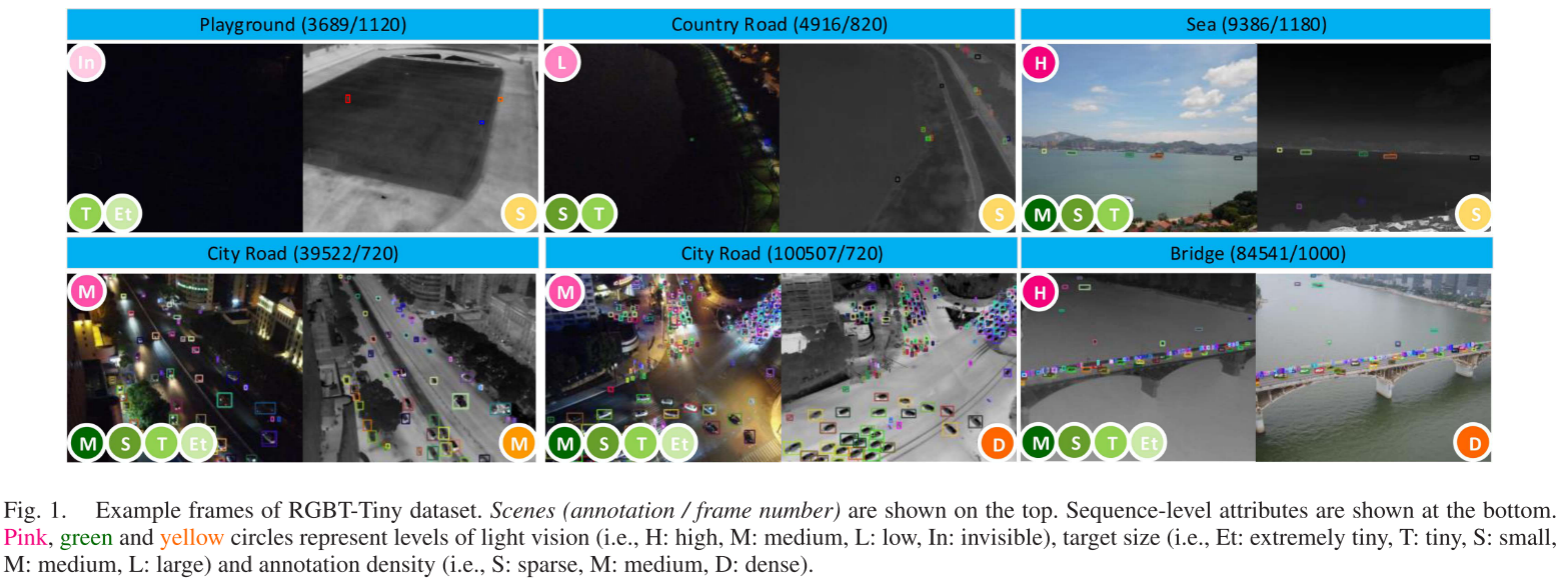
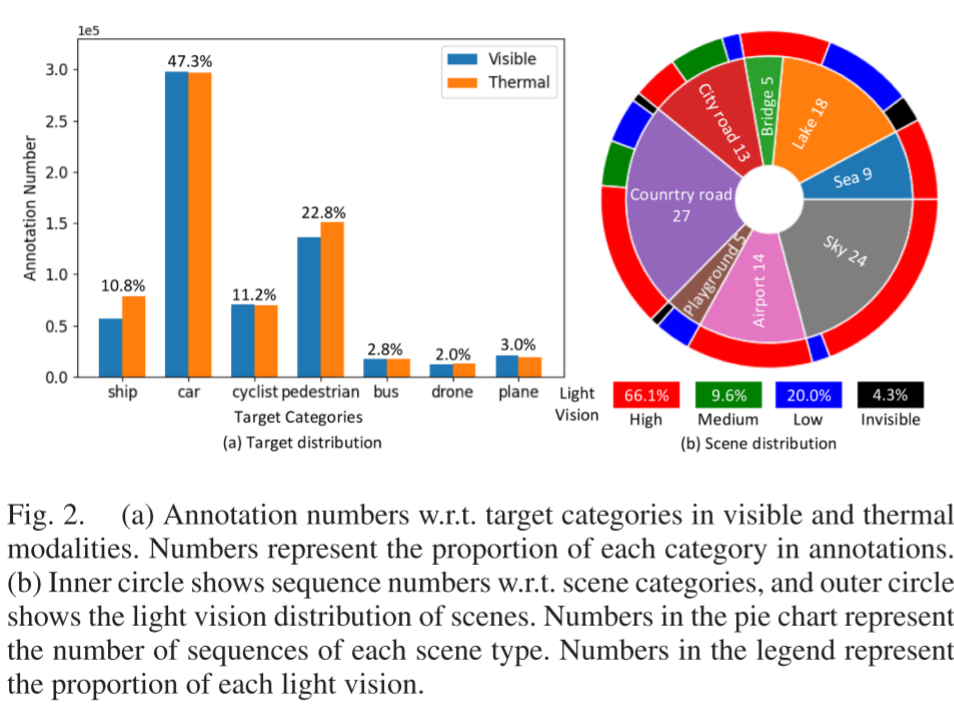
丰富的场景多样性
数据集覆盖了8种典型场景:
- 海洋、湖泊、桥梁
- 城市道路、乡村道路
- 操场、机场、天空
包含7个目标类别(船、车、骑行者、行人、公交车、无人机、飞机)。
光照条件的全覆盖
这是RGBT-Tiny的一大亮点:
- 高光照:白天场景
- 中等光照:黄昏时分
- 低光照:夜晚但有城市灯光
- 不可见光照:完全黑暗环境
夜间序列占33.9%,其中超过70%处于低光照和不可见光照条件。这种设计使得数据集能够真实模拟全天候应用场景。
严格的数据质量控制
精确对齐:使用相机校准和单应性变换技术,确保可见光和热红外图像像素级对齐。
两步验证流程:
- 10名专业标注员独立标注,并交叉审核
- 每张图像由另外2名评审员复核,共5名评审员确保质量
- 不断修订直到无争议
这种严格的质量控制保证了数据集的可靠性。
SAFit:为小目标量身定制的评价指标
传统指标的困境
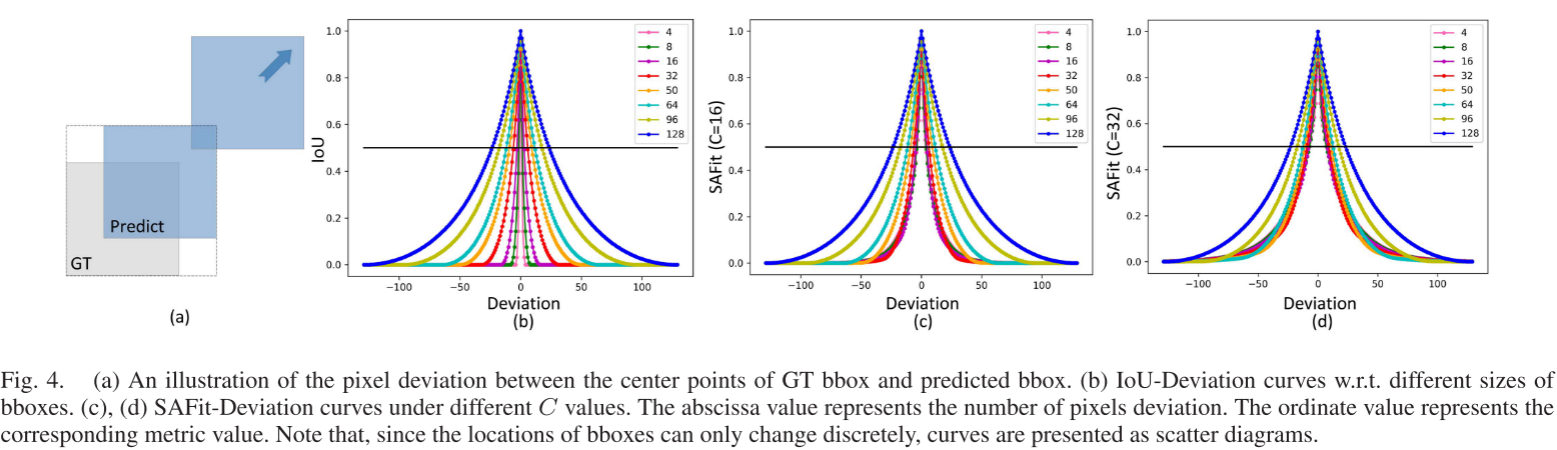
IoU指标对大目标很友好,但对小目标"太苛刻"。为什么?
假设一个8×8的小目标,预测框偏移2个像素:
- 真实框面积:64
- 预测框面积:64
- 重叠面积:36(约)
- IoU = 36/92 ≈ 0.39
从1.0到0.39的巨大落差,显然不合理!
相反,NWD(归一化Wasserstein距离)指标对小目标友好,但在大目标上表现不佳。
SAFit:取长补短的智慧
论文提出的**SAFit(Scale Adaptive Fitness)**指标巧妙地结合了两者优势:
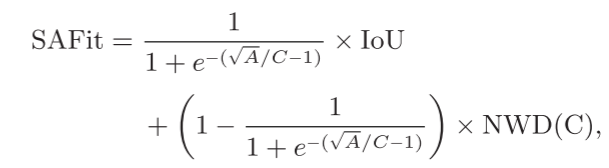
其中权重由目标尺寸自适应调整:
- 小目标:更依赖NWD,对位置偏差容忍度高
- 大目标:更依赖IoU,保持精确定位
- 中等目标:平滑过渡
这就像一个"智能开关",能根据目标大小自动选择最合适的评价方式。
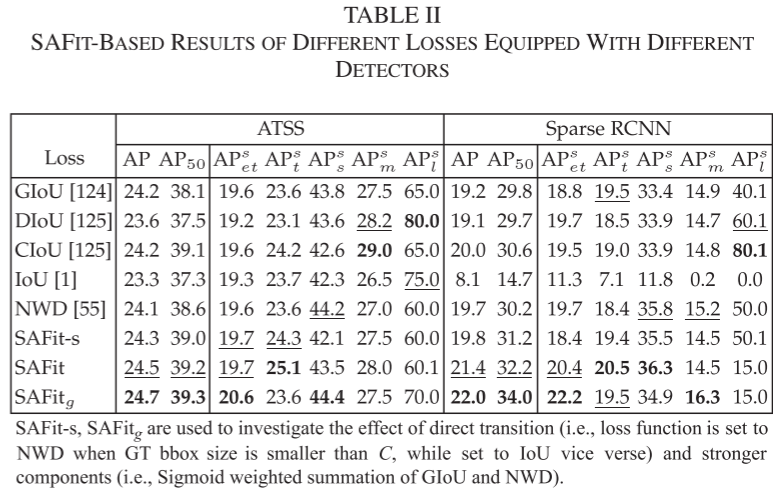
实验验证
在Cascade RCNN等检测器上的实验表明,SAFit的AP值在小目标上接近NWD,在大目标上快速切换到与IoU一致。
更重要的是,SAFit还可以用作训练损失。实验显示,使用SAFit损失训练的模型在不同检测器上都表现出高鲁棒性,甚至优于其单独的组成部分。
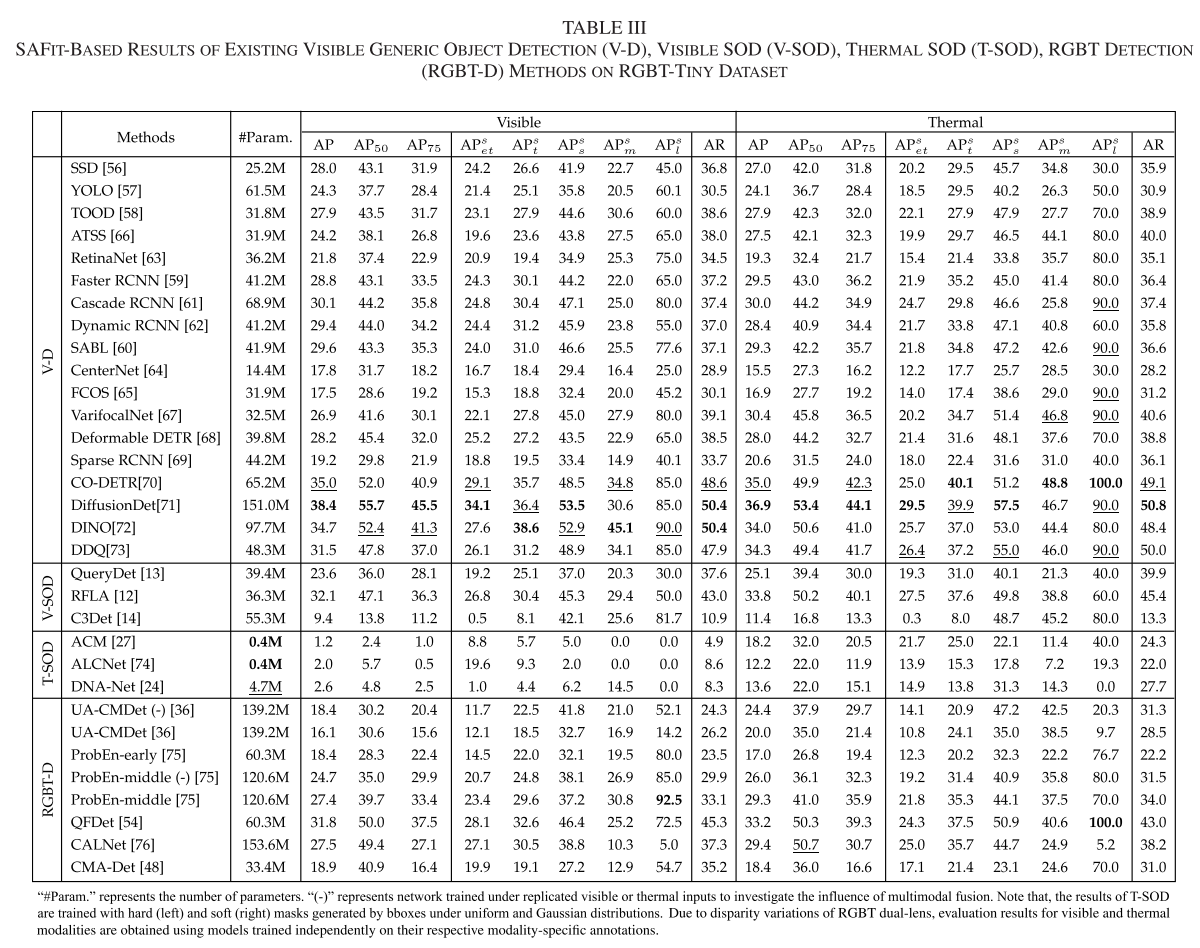
全面的基线评测:揭示挑战与机遇
研究团队对30个最新算法进行了系统评估,包括:
- 18个可见光通用检测方法(如Faster RCNN、YOLO、DETR系列)
- 3个可见光小目标检测方法(RFLA、QueryDet、C3Det)
- 3个热红外小目标检测方法(ACM、ALCNet、DNA-Net)
- 6个RGBT检测方法(UA-CMDet、QFDet、CMA-Det等)
关键发现
1. 端到端框架的崛起
DETR-based检测器(如Deformable DETR、DINO)和Diffusion-based检测器(如DiffusionDet)展现出显著优势。
2. 密集提议是王道
由于小目标外观线索极少,密集的候选提议(无论是锚框、查询还是其他形式)能提供更好的覆盖率。
3. 专用技术显身手
区域提议精炼、多尺度信息融合、上下文信息利用等小目标特定技术都展现出良好效果。
4. RGBT融合的力量
RGBT检测方法通过充分利用双模态互补信息,在两种模态上都实现了性能提升。特别是在低光照和不可见光照条件下,热红外模态提供了关键的补充信息。
数据集的挑战性
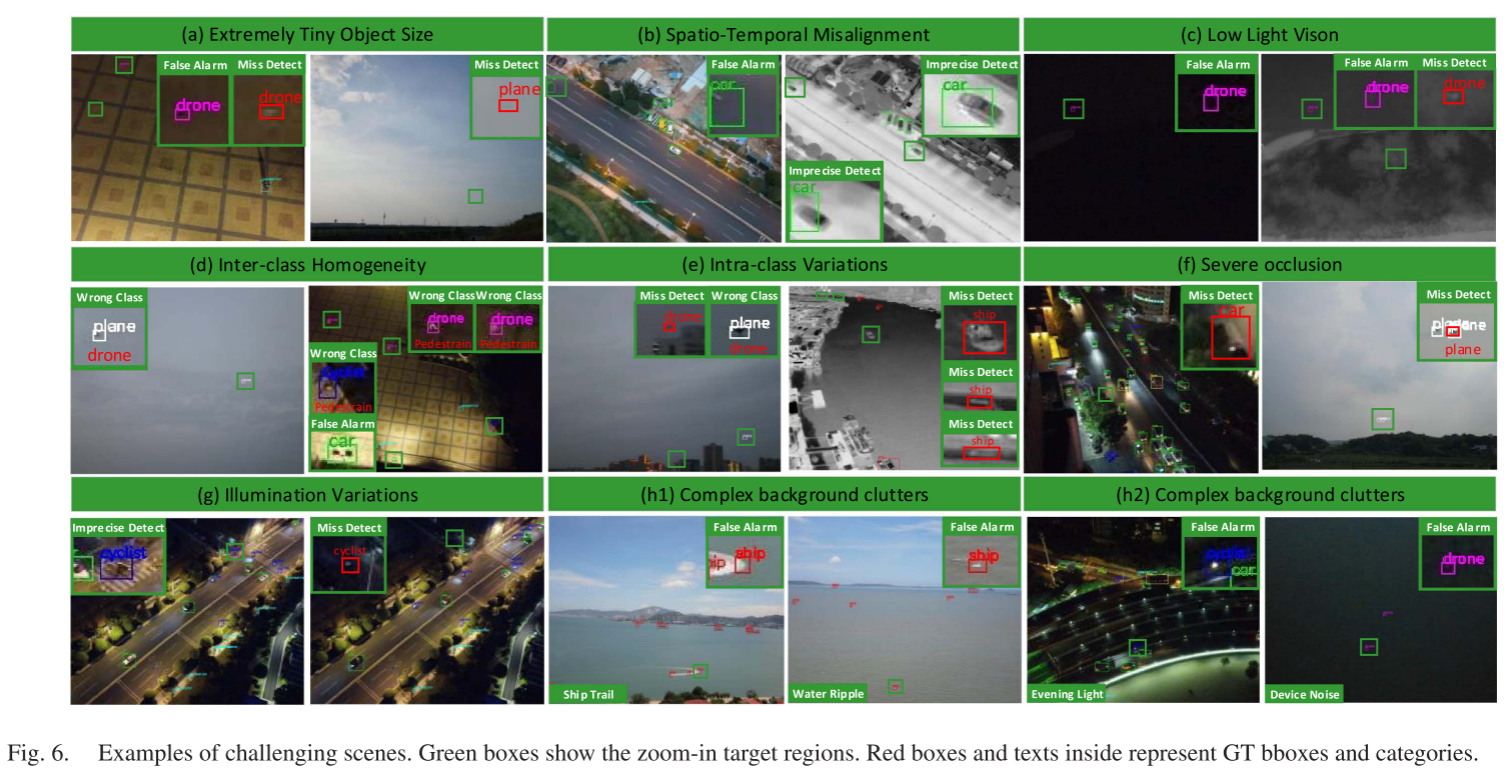
当前最佳方法的AP仅在20-30%左右,表明RGBT-Tiny确实是一个极具挑战性的基准。主要挑战包括:极小的目标尺寸、跨模态语义冲突、时空未对齐、类内差异大、类间相似性高、类别不平衡、严重遮挡、光照变化和复杂背景干扰。
应用前景:从实验室到现实世界
RGBT-Tiny数据集的应用潜力巨大:
1. 智能监控
- 夜间公共安全监控
- 边境巡逻
- 关键基础设施防护
2. 无人驾驶
- 全天候行人和车辆检测
- 恶劣天气条件下的感知
3. 搜索救援
- 海上搜救
- 灾难现场人员定位
- 高空搜索任务
4. 交通监控
- 智能交通管理
- 违章检测
- 流量统计
5. 军事应用
- 反无人机系统
- 目标识别与跟踪
- 态势感知
技术启示:未来研究方向
基于RGBT-Tiny的评测结果,我们可以看到几个有前景的研究方向:
1. 更强的多尺度表征 小目标检测需要更精细的特征金字塔和自适应尺度融合机制。
2. 跨模态对齐与融合 如何克服时空未对齐和语义冲突,实现更有效的RGBT信息融合?
3. 上下文感知机制 利用场景上下文、时序信息和空间关系来辅助小目标检测。
4. 类别平衡策略 针对长尾分布问题,设计更好的损失函数和采样策略。
5. 弱监督和无监督方法 减少对大量精确标注的依赖,降低数据采集成本。
结语
RGBT-Tiny数据集的发布,标志着可见光-热红外小目标检测研究进入了一个新阶段。它不仅提供了一个极具挑战性的测试平台,更重要的是为研究者指明了方向,揭示了当前技术的瓶颈和未来的机遇。
SAFit评价指标的提出,则为小目标检测提供了更合理的评价标准,有望推动该领域算法的实质性进步。
正如论文作者所期望的,RGBT-Tiny不仅是一个数据集,更是一个生态系统的起点——它将催生新的算法、新的应用、新的研究范式,最终让机器在极端条件下也能拥有"火眼金睛"。
免责声明:本文基于论文内容进行解读,所有技术细节和数据均来自原论文。如需深入了解,请阅读原文。

















 1461
1461

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









