



 本文详细介绍了如何利用单位矩阵和坐标变换矩阵进行旋转和平移操作,以实现空间坐标在不同坐标系间的转换。通过具体例子展示了在CALYPSO软件中如何调用函数进行坐标系的平移和旋转,并通过Python读取坐标系差异文件,完成坐标转换,验证了计算结果的准确性。
本文详细介绍了如何利用单位矩阵和坐标变换矩阵进行旋转和平移操作,以实现空间坐标在不同坐标系间的转换。通过具体例子展示了在CALYPSO软件中如何调用函数进行坐标系的平移和旋转,并通过Python读取坐标系差异文件,完成坐标转换,验证了计算结果的准确性。
坐标变换实际上是通过矩阵乘法实现的。
单位矩阵
那么
是否可以简单把这个单位矩阵EEE理解为坐标系呢?轴,
轴,
代表
轴。
那么基本坐标系就是这样的矩阵
在坐标系下做就很简单了(
代表旋转)
绕旋转
绕旋转
绕旋转
那么平移是怎么实现的呢?仅通过这样的
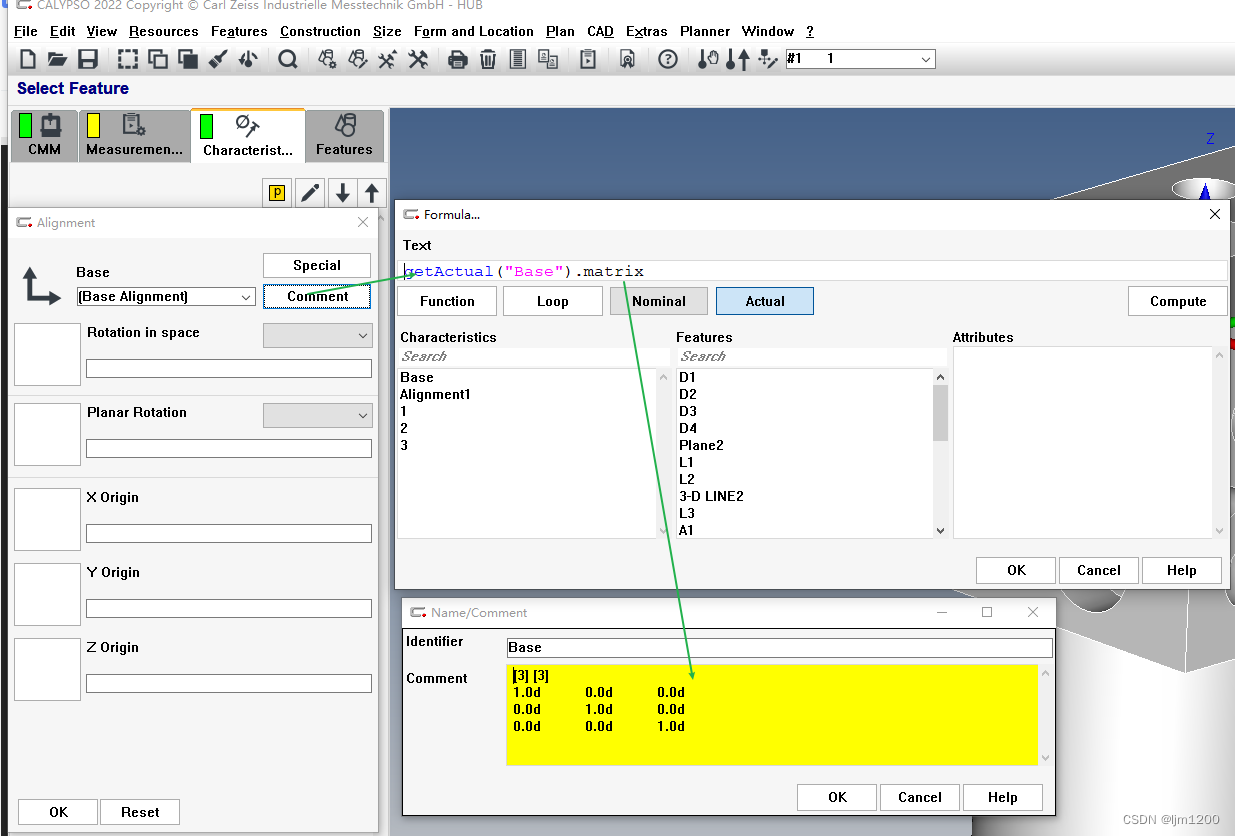
在CALYPSO通过PCM调用坐标系原点
getActual("Alignment1").x
getActual("Alignment1").y
getActual("Alignment1").z
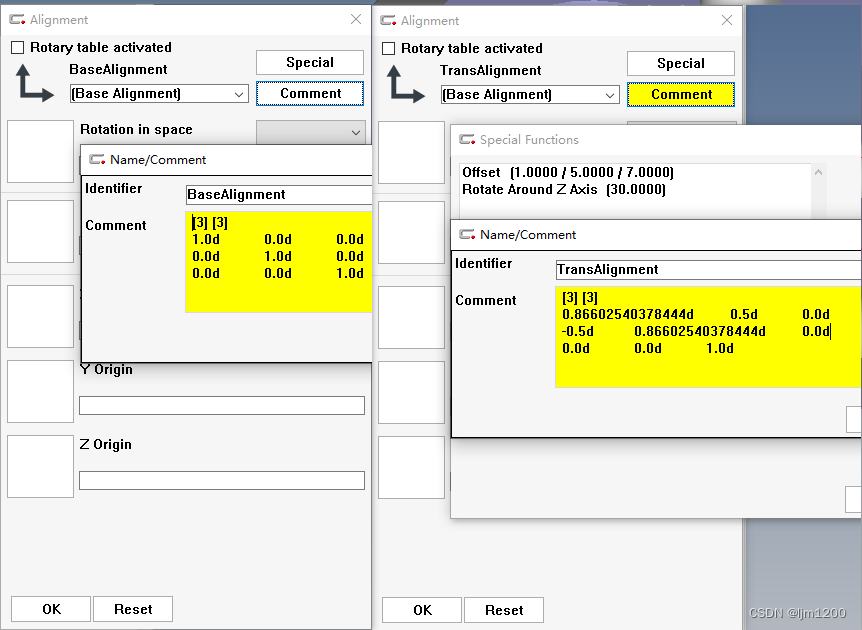
在特性栏中加入轴旋转了
°的坐标系。按照上面绕
轴旋转的矩阵公式可得到
那么AzA_zAz应该为:
这个writeDiffCoordSysToFile()写出
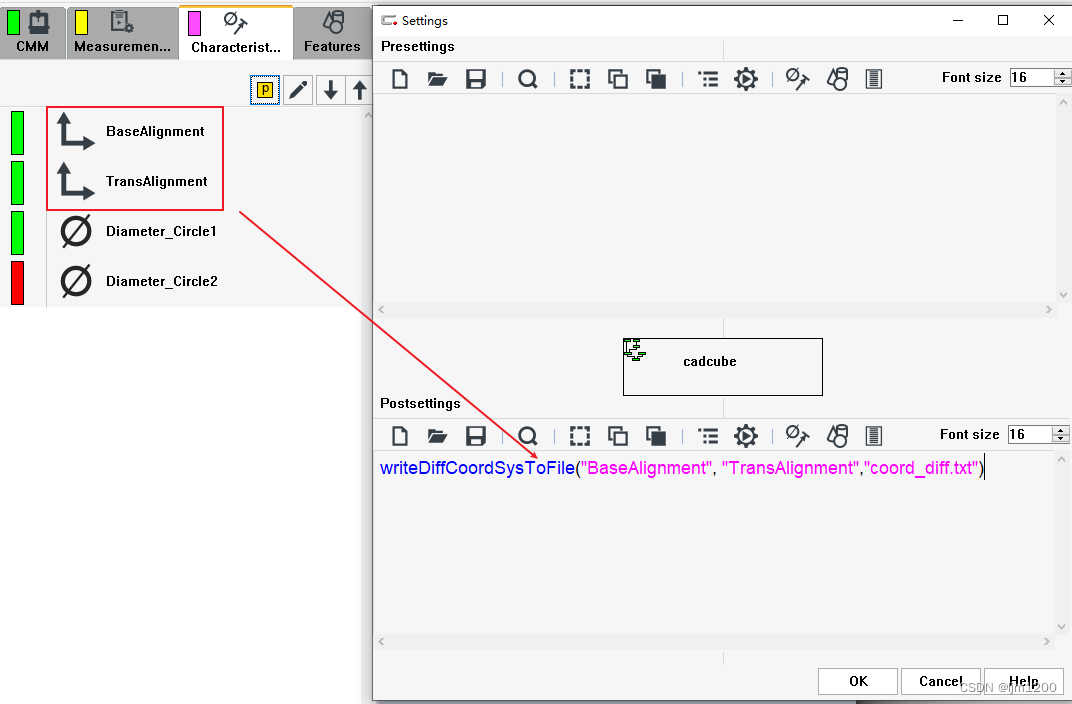
writeDiffCoordSysToFile("BaseAlignment", "TransAlignment","coord_diff.txt")
使用Python去读取生成的文本文件,带入一个圆的圆心坐标
# -*- coding: utf-8 -*-
"""
Created on Thurs Dec 22 12:39:48 2022
@author: ZCJOHNLV
"""
import numpy as np
def get_transformation(filename):
diff = np.genfromtxt(filename)
r = diff[:9].reshape((3,3))
t = diff[9:].reshape((3,1))
# print(r)
# print(t)
return r, t
r, t = get_transformation('coord_diff.txt')
# example point in BaseAlignment
point = np.array([ -40.1936,31.9956,-3.0821]).reshape((3,1))
# change reference frame to TransAlignment
point_trans = r@point + t
# Back to BASE
point_base = np.linalg.inv(r)@(point_trans - t)
print(f'Trans Alignment coord: \n{point_trans}')
print(f'BASE Alignment coord: \n{point_base}')
运行程序,经过坐标系
Trans Alignment coord:
[[-22.17690407]
[ 43.97567539]
[-10.0821 ]]
BASE Alignment coord:
[[-40.1936]
[ 31.9956]
[ -3.0821]]
这和CALYPSO计算结果是一致的。

















 8092
8092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









