






H2 H无穷半车悬架控制-4自由度悬架:s函数搭建悬架模型、随机路面激励模型、LMI求解文件。
赠送word详解文件

H2 H无穷半车悬架控制-4自由度悬架:s函数搭建悬架模型、随机路面激励模型、LMI求解文件
悬架系统是汽车行驶中非常重要的组成部分,其负责保障汽车在路面行驶时的稳定性、舒适性和安全性。H2 H无穷半车悬架控制-4自由度悬架是一种现代化的悬架系统,它能够通过有效地控制车身的姿态和车轮的姿态,大幅提升整车的行驶品质和稳定性。本文将介绍如何通过s函数搭建悬架模型、随机路面激励模型和LMI求解文件来实现对H2 H无穷半车悬架控制-4自由度悬架的控制。
首先,我们需要使用s函数来搭建悬架模型。在这个模型中,我们需要考虑到悬架系统的各个关键部件,如弹簧、减震器、悬挂臂等,并对它们进行建模和参数化。通过这个模型,我们可以得到悬架系统在各种路面条件下的受力分布和变化规律,从而为后续的控制器设计提供基础数据。
随着模型的搭建完成,我们需要对路面激励进行模拟。由于实际行驶中路面的状态可能会出现非常多的变化,因此我们需要构建一个随机路面激励模型,来模拟实际行驶中路面的状态。通过这个模型,我们可以得到在不同路况下悬架系统的受力分布和响应情况,从而完善悬架模型的精度和准确性。
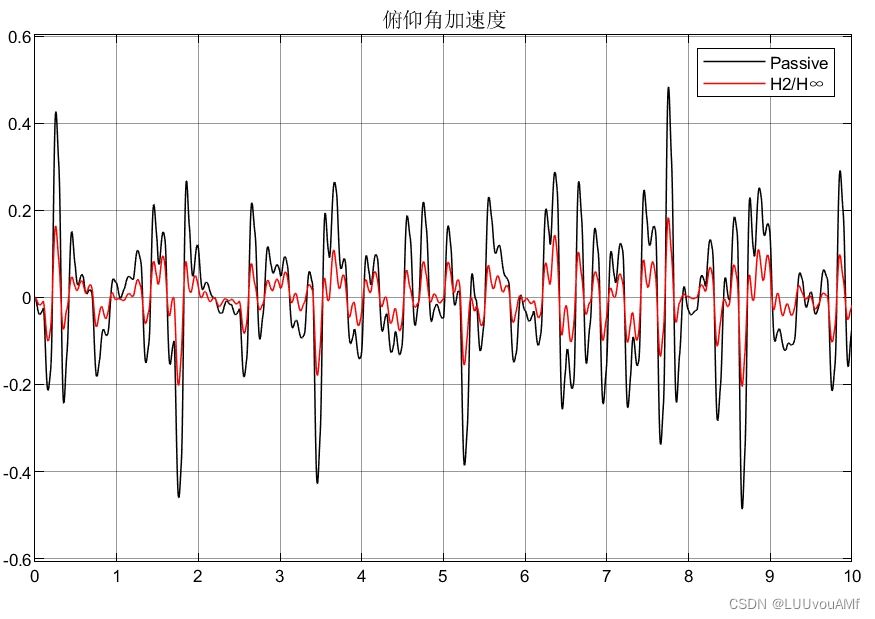
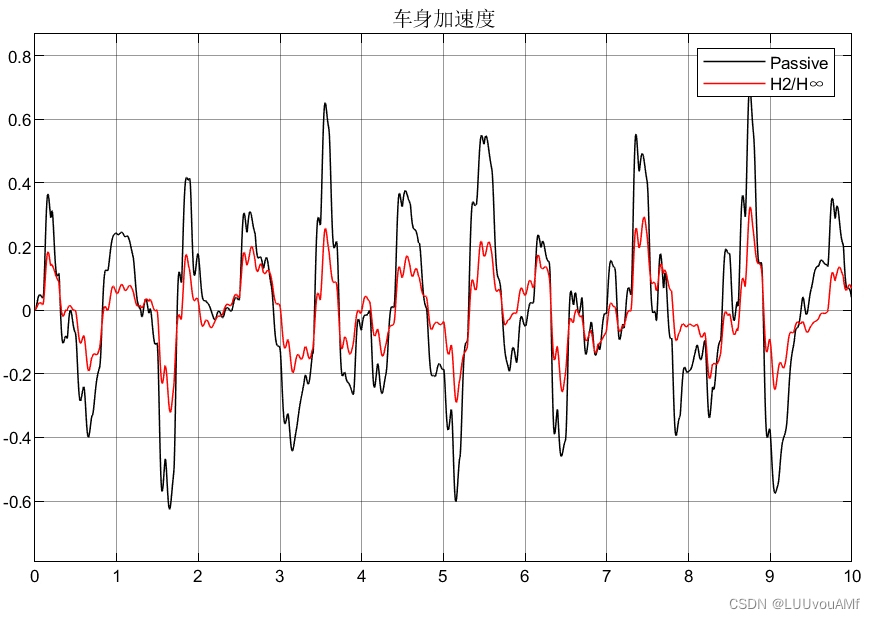
最后,我们需要使用LMI(线性矩阵不等式)求解文件来实现对悬架系统的控制。通过这个求解文件,我们可以搭建一套完整的控制器系统,对悬架系统进行控制和调节。这个控制器系统需要能够对悬架系统的各种状态和参数进行实时监测和反馈,从而保证悬架系统在各种路况下都能够保持良好的稳定性和舒适性。
综上所述,H2 H无穷半车悬架控制-4自由度悬架是一种非常先进的悬架系统,它能够通过精细的控制和设计,实现对车身姿态和轮胎姿态的有效调节和控制。通过s函数搭建悬架模型、随机路面激励模型和LMI求解文件,我们可以对这个悬架系统进行有效地模拟、优化和控制,从而大幅提升整车的行驶品质和舒适性。
相关代码,程序地址:http://lanzouw.top/695730880926.html















 937
937

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









