






空间直线路径 圆弧过渡轨迹规划算法
可提供源码学习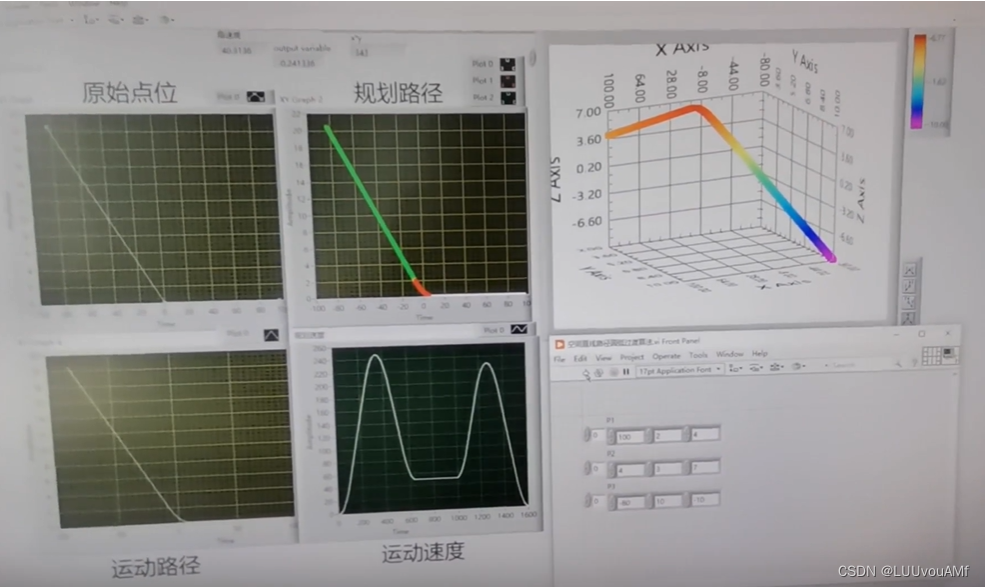
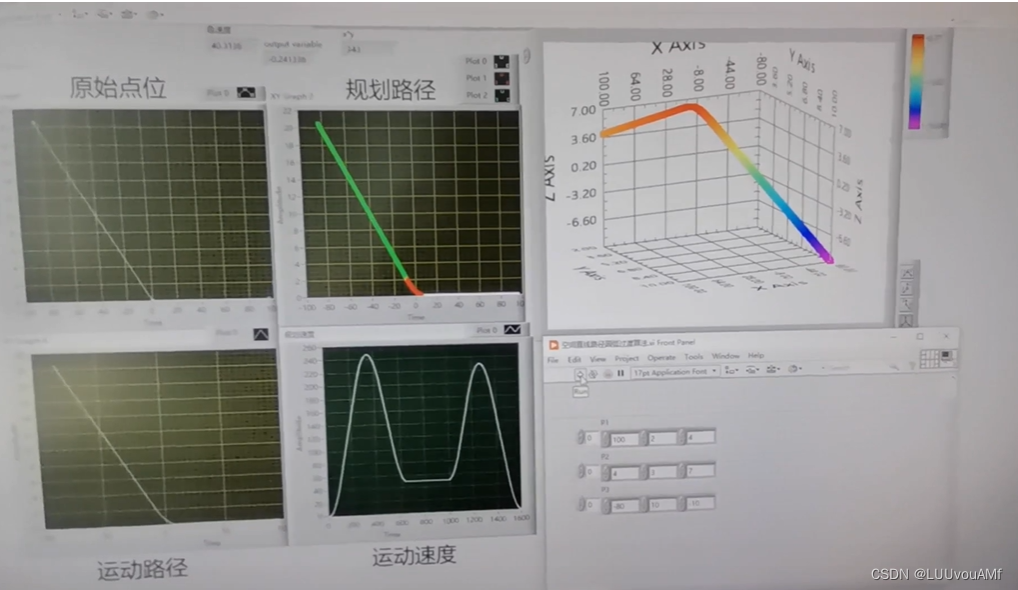
空间直线路径与圆弧过渡轨迹规划算法是机器人学习领域中非常重要的一种算法,该算法的应用广泛,不仅可以用于工业机器人的轨迹规划,还可以用于自动驾驶汽车等领域中。这种算法的主要作用是通过设计合理的轨迹规划算法,使机器人能够在空间中以高效、精确的方式移动,并在需要的时候进行平滑的过渡。
在空间直线路径与圆弧过渡轨迹规划算法中,最关键的一步是设计一种完整、准确的运动控制模型。这个模型需要将机器人的运动控制与轨迹规划相结合,在保证精度和效率的同时,还要考虑到机器人的实际情况,如工具的质量、摩擦、惯性等因素。这个模型需要涵盖机器人的动力学、力学、运动学等多个方面的知识,需要考虑到机器人实际运动过程中的各种因素和变量,如速度、加速度、位置、方向等。
在设计完整运动控制模型的基础上,下一步是进行轨迹规划。在机器人的智能控制领域,轨迹规划是一个非常重要的问题。在空间直线路径与圆弧过渡轨迹规划算法中,轨迹规划的目标是设计一条平滑的轨迹,以实现机器人的高效、精确运动。在轨迹规划的过程中,需要考虑到机器人的实际情况,如机器人运动的速度、加速度、位置、方向等因素。同时,需要考虑到机器人的动力学、力学、运动学等多个方面的知识,以保证轨迹规划的准确性和可靠性。
在空间直线路径与圆弧过渡轨迹规划算法中,源码学习是非常重要的一步。通过学习源码,可以更深入地了解算法的实现细节,包括运动控制模型的设计、轨迹规划的算法、动力学、力学、运动学等多个方面的知识。此外,还可以通过学习源码,掌握机器人运动控制和轨迹规划的基本原理,为以后的工作打下坚实的基础。
总之,空间直线路径与圆弧过渡轨迹规划算法是机器人学习领域中非常重要的一种算法,其应用具有广泛的前景。在设计轨迹规划算法的过程中,需要考虑到机器人的实际情况和各种因素,以保证算法的准确性和可靠性。同时,源码学习也是非常重要的一步,通过学习源码可以更深入地了解算法的实现细节和基本原理,为以后的工作打下坚实的基础。
相关代码,程序地址:http://lanzouw.top/680504959172.html















 1390
1390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









