







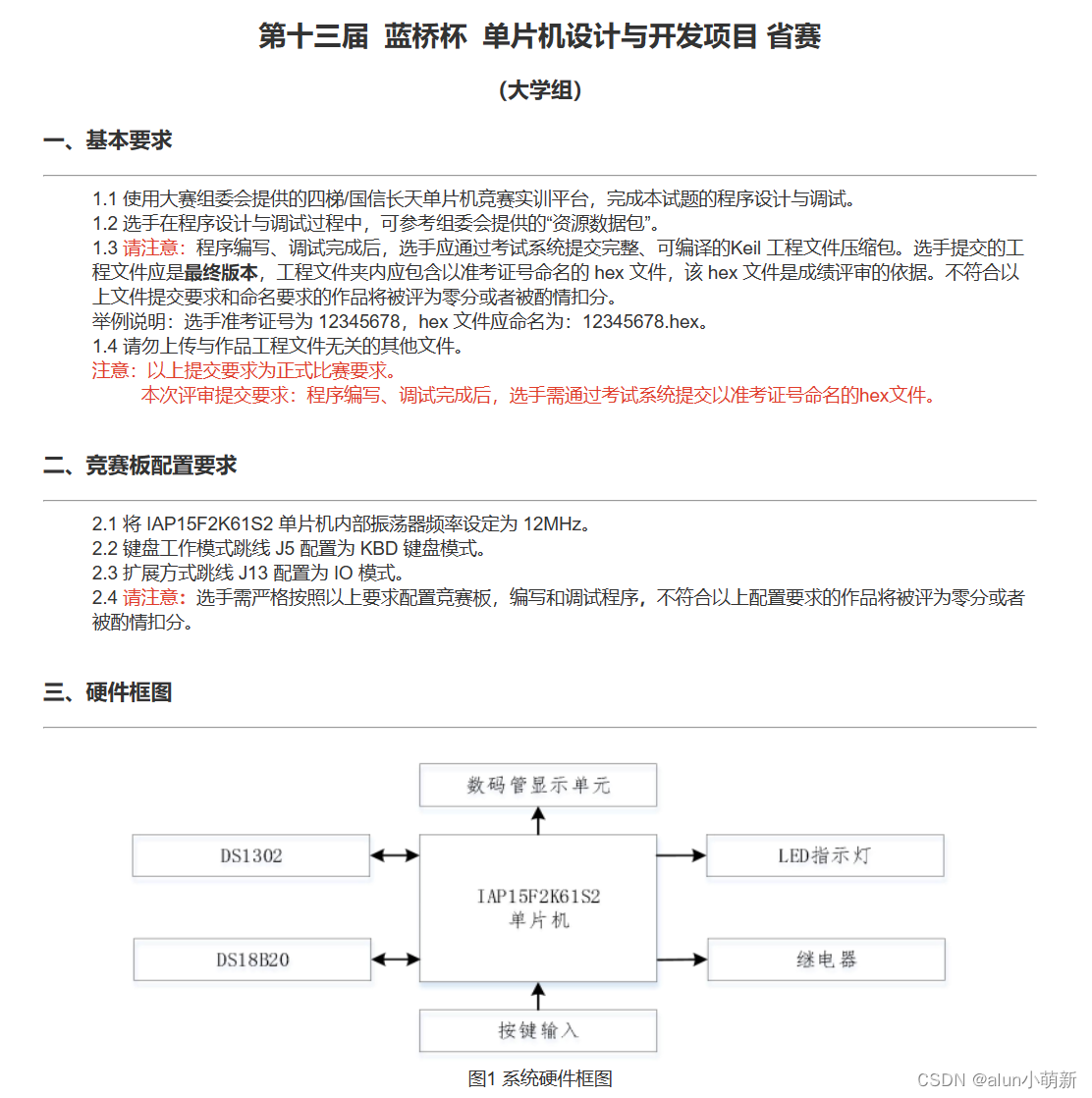
第十三届蓝桥杯单片机省赛程序设计题及代码参考
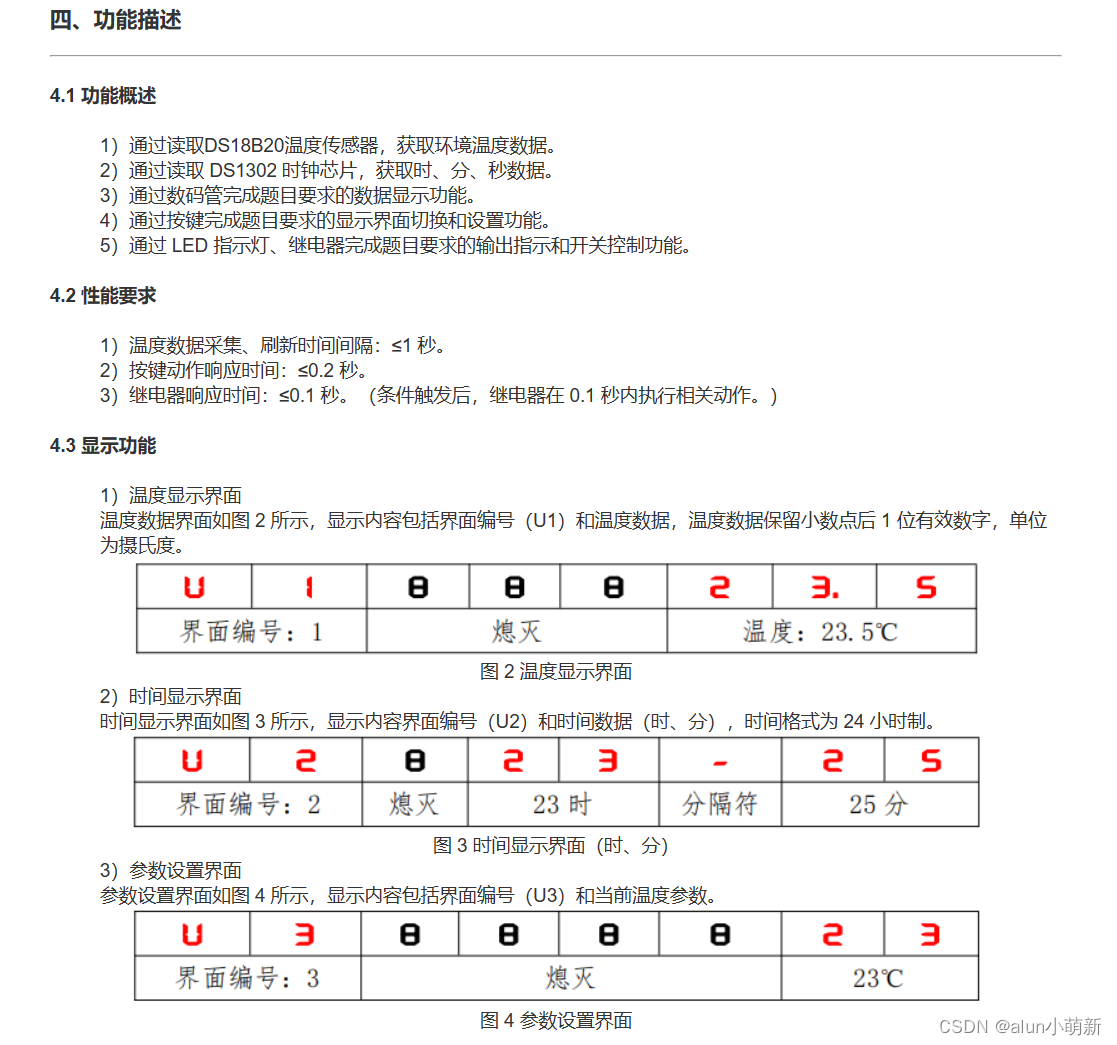
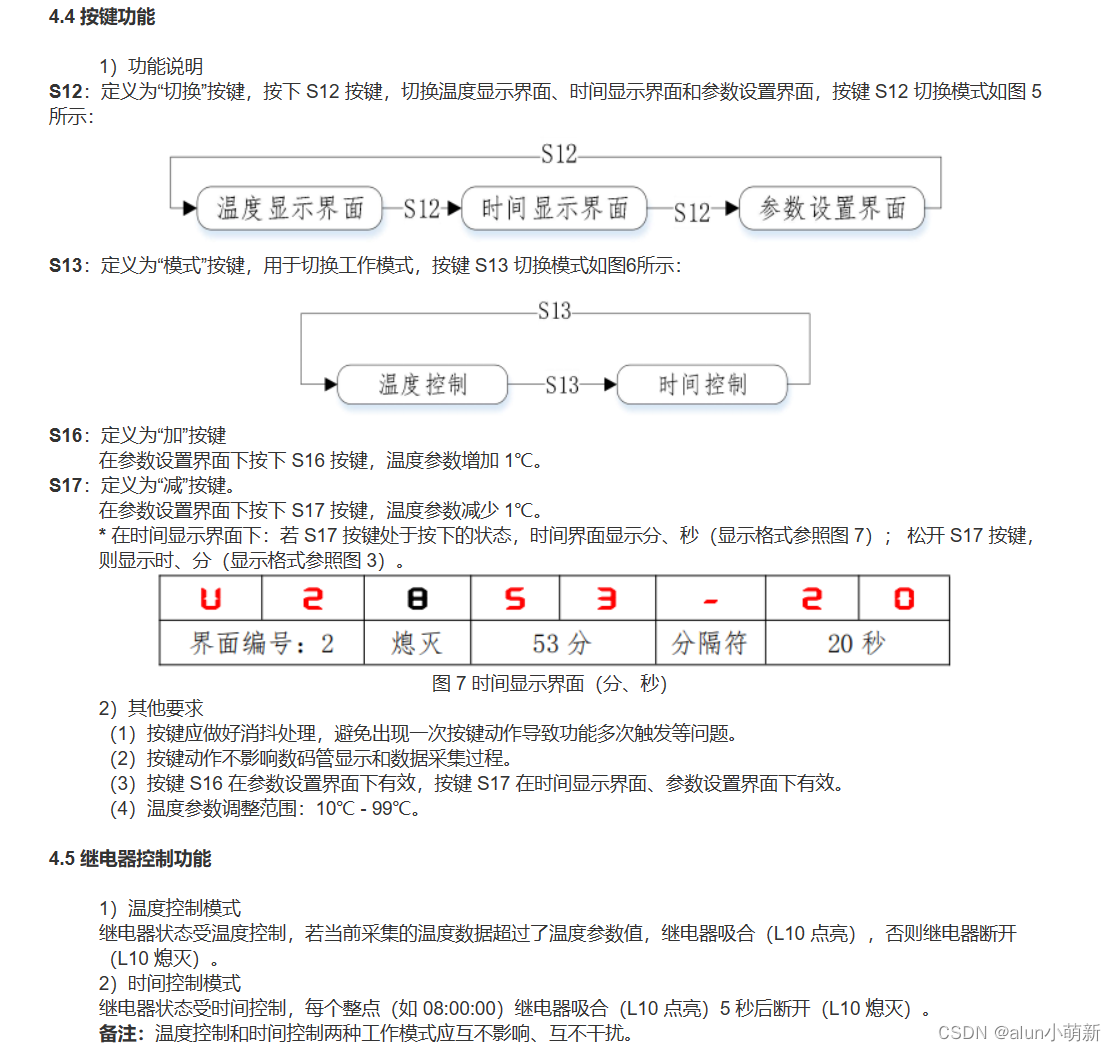
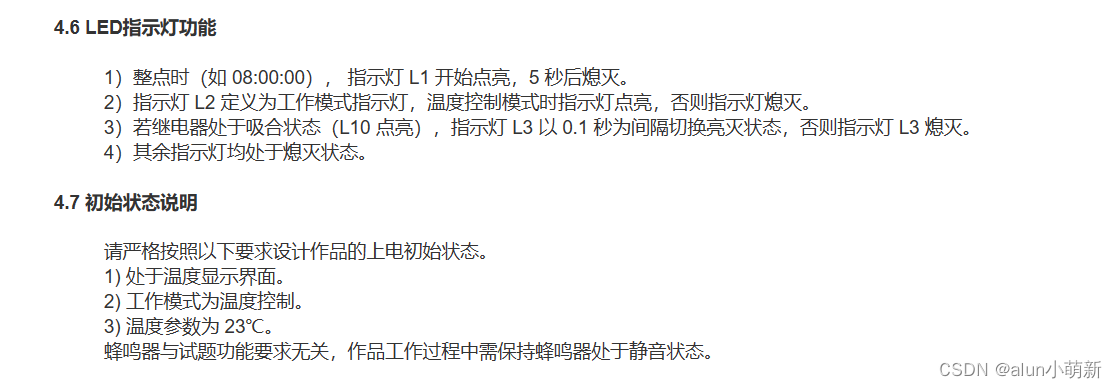
题目
代码(不包含驱动)
#include <STC15F2K60S2.H>
#include "intrins.h"
#include "iic.h"
#include "onewire.h"
#include "ds1302.h"
sbit R3 = P3^2;
sbit R4 = P3^3;
sbit L3 = P3^5;
sbit L4 = P3^4;
code unsigned char noSeg_Table[] ={
0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e
};
code unsigned char yesSeg_Table[] ={
0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,0x08,0x03,0x46,0x21,0x06,0x0e
};
unsigned char write_add[]={0x80,0x82,0x84,0x86,0x88,0x8a,0x8c};
unsigned char read_add[]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};
unsigned char time[]={0x00,0x00,0x12,0x01,0x01,0x01,0x24};
//ds18b20温度采集变量
unsigned char LSB,MSB;
float ch_temp=0.0;
unsigned int temp;
//数码管显示变量
unsigned int smg_mode1=0;
unsigned int smg_mode3=23;
//led和继电器状态保存
unsigned char led_state=0xff;
unsigned char jdq_state=0x00;
//定时器记录标志
unsigned char mode_5s=1;
unsigned char mode_100ms=1;
unsigned int count_5s=0;
unsigned int count_100ms=0;
//按键模式切换
unsigned char mode_S12=1;
unsigned char mode_S17=1;
unsigned char mode_S13=1;
//============锁存器选择===========
void HC138(unsigned char n,unsigned char dat)
{
P0 = dat;
switch(n)
{
case 4:
P2 = (P2 & 0X1F) | 0X80;
break;
case 5:
P2 = (P2 & 0X1F) | 0Xa0;
break;
case 6:
P2 = (P2 & 0X1F) | 0Xc0;
break;
case 7:
P2 = (P2 & 0X1F) | 0Xe0;
break;
}
P2 = (P2 & 0X1F) | 0X00;
}
//============延时函数===========
void Delay(unsigned int t)
{
while(t--);
}
//============DS18B20===========
void useds18b20()
{
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
Delay(500);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
LSB = Read_DS18B20();
MSB = Read_DS18B20();
init_ds18b20();
temp = (MSB << 8)| LSB;
if((temp & 0xf800) == 0x0000 )
{
ch_temp = temp*0.0625;
}
smg_mode1 = ch_temp*10;
}
//============DS1302===========
void writed1302()
{
unsigned char i;
Write_Ds1302_Byte( 0x8e,0x00 );
for(i=0;i<7;i++)
{
Write_Ds1302_Byte( write_add[i],time[i] );
}
Write_Ds1302_Byte( 0x8e,0x80 );
}
void readds1302()
{
unsigned char i;
for(i=0;i<7;i++)
{
time[i] = Read_Ds1302_Byte( read_add[i] );
}
}
//============数码管选择===========
void Displaysmg(unsigned char n,unsigned char dat) //单个数码管
{
HC138(6,0x01 << n);
HC138(7,dat);
Delay(300);
HC138(6,0x01 << n);
HC138(7,0xff);
}
void allDisplaysmg()
{
HC138(6,0x00);
HC138(7,0xff);
Delay(200);
}
void showsmg()
{
Displaysmg(0,0xc1);
Displaysmg(1,noSeg_Table[mode_S12]);
switch(mode_S12)
{
case 1:
Displaysmg(5,noSeg_Table[((smg_mode1)/100)%10]);
Displaysmg(6,yesSeg_Table[((smg_mode1)/10)%10]);
Displaysmg(7,noSeg_Table[((smg_mode1)/1)%10]);
allDisplaysmg();
break;
case 2:
if(mode_S17 ==1 )
{
Displaysmg(3,noSeg_Table[time[2]/16]);
Displaysmg(4,noSeg_Table[time[2]%16]);
Displaysmg(5,0xbf);
Displaysmg(6,noSeg_Table[time[1]/16]);
Displaysmg(7,noSeg_Table[time[1]%16]);
allDisplaysmg();
}
else
{
Displaysmg(3,noSeg_Table[time[1]/16]);
Displaysmg(4,noSeg_Table[time[1]%16]);
Displaysmg(5,0xbf);
Displaysmg(6,noSeg_Table[time[0]/16]);
Displaysmg(7,noSeg_Table[time[0]%16]);
allDisplaysmg();
}
break;
case 3:
Displaysmg(6,noSeg_Table[((smg_mode3)/10)%10]);
Displaysmg(7,noSeg_Table[((smg_mode3)/1)%10]);
allDisplaysmg();
break;
}
}
//============KBD按键===========
void keys()
{
//S13
R3 = 0;
R4 = L3 = L4 =1;
if(L3 == 0)
{
Delay(100);
while(L3 == 0)
{
showsmg();
}
mode_S13++;
if(mode_S13 == 3) mode_S13 = 1;
}
//S17
R3 = 0;
R4 = L3 = L4 =1;
if((L4 == 0) && (mode_S12 == 3))
{
Delay(100);
while((L4 == 0) && (mode_S12 == 3))
{
showsmg();
}
smg_mode3--;
}
if((L4 == 0) && (mode_S12 == 2))
{
Delay(100);
while((L4 == 0) && (mode_S12 == 2))
{
mode_S17++;
showsmg();
}
mode_S17=1;
}
//S12
R4 = 0;
R3 = L3 = L4 =1;
if(L3 == 0)
{
Delay(100);
while(L3 == 0)
{
showsmg();
}
mode_S12++;
if(mode_S12 == 4) mode_S12=1;
}
//S16
R4 = 0;
R3 = L3 = L4 =1;
if((L4 == 0) && (mode_S12 == 3))
{
Delay(200);
while((L4 == 0) && (mode_S12 == 3))
{
showsmg();
}
smg_mode3++;
}
}
//============定时器===========
void InitTimer0()
{
TMOD = 0X01;
TH0 = (65536 - 50000) / 256;
TL0 = (65536 - 50000) % 256;
TR0 = 1;
ET0 = 1;
EA = 1;
}
void ServiceTimer0() interrupt 1
{
TH0 = (65536 - 50000) / 256;
TL0 = (65536 - 50000) % 256;
readds1302(); //刷新时间读取
//led和继电器选择显示
if((time[1]==0) && (time[0] == 0))
{
led_state = led_state & 0xfe;
mode_5s = 2;
if(mode_S13 == 2)
{
jdq_state = 0x10;
}
}
if(mode_5s == 2)
{
count_5s++;
if(count_5s == 100)
{
count_5s = 0;
mode_5s = 1;
led_state = led_state | 0x01;
if(mode_S13 == 2)
{
jdq_state = 0x00;
}
}
}
if(mode_S13 == 1)
{
led_state = led_state & 0xfd;
}
else
{
led_state = led_state | 0x02;
}
if(mode_S13 == 1)
{
if(smg_mode1 > smg_mode3*10)
{
jdq_state = 0x10;
}
else
{
jdq_state = 0x00;
}
}
if(jdq_state == 0x10)
{
count_100ms++;
led_state = led_state & 0xfb;
if(count_100ms == 3)
{
count_100ms = 0;
led_state = led_state | 0x04;
}
}
else
{
led_state = led_state | 0x04;
}
HC138(4,led_state);
HC138(5,jdq_state);
}
//============初始化函数===========
void Initsystem()
{
HC138(4,0XFF);
HC138(5,0X00);
HC138(6,0X00);
HC138(7,0XFF);
}
//============主函数===========
void main()
{
Initsystem();
InitTimer0();
writed1302();
while(1)
{
useds18b20();
showsmg();
keys();
}
}















 1677
1677











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









