







在石头剪刀布这个游戏里面,树莓派需要通过控制舵机的转动来和我进行“猜拳”游戏。这篇文章介绍树莓派控制舵机的基础操作。
本文主要参考文章树莓派使用python 控制G90舵机。
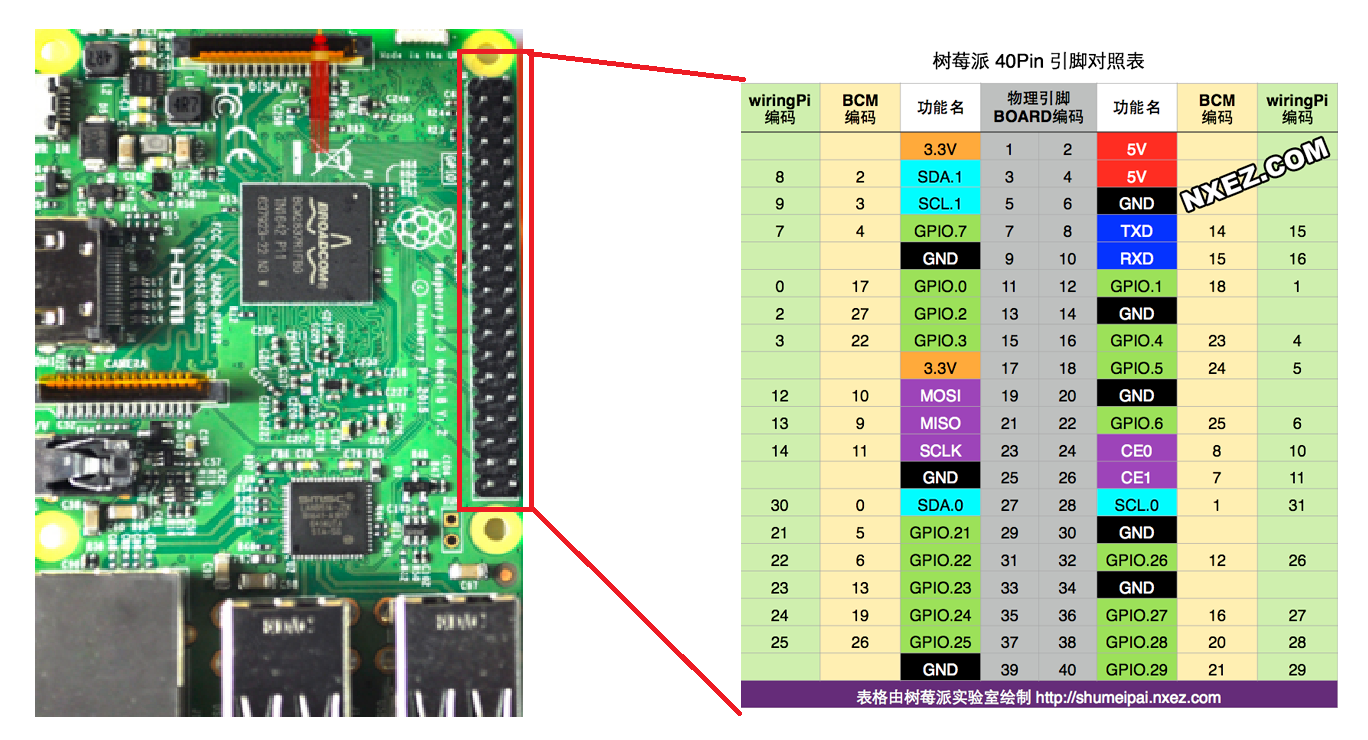
我使用的舵机是辉盛的SG90。SG90共有三根线,红线接5V电源,棕线接GND,黄线为数据控制线,该线接到GPIO口上,这里使用BCM模式下的21引脚。关于树莓派的引脚,可以参照下图,右边的引脚编号和左边的树莓派针脚一一对应。
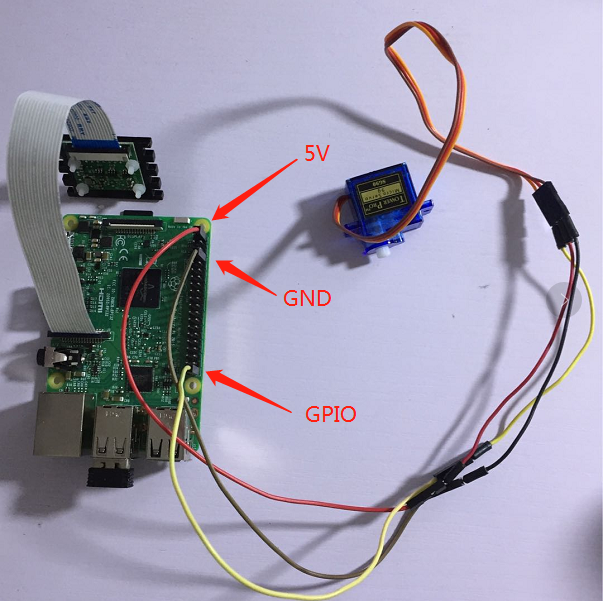
根据上述舵机的接口和树莓派的针脚定义,舵机和树莓派的连接图如下图所示:
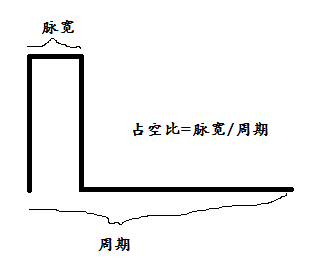
舵机转动的角度和脉宽一一对应。SG90的脉冲周期为20毫秒,脉宽0.5ms - 2.5ms(相应的占空比为2.5% - 12.5%),对应的角度为-90到+90度,上述定义可通过下图比较清晰地了解:
树莓派的软件部分也很简单,主要通多RPi.GPIO模块进行针脚的控制。通过以下的代码,可以实现控制舵机输出你输入的角度:
import RPi.GPIO as GPIO
import time
import signal
import atexit
imp 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









