






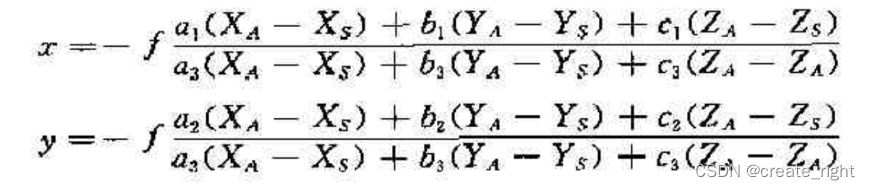
摄影测量的最终目的是在已知像片上像点坐标的前提下,推导出像点所对应实际地物点的坐标。
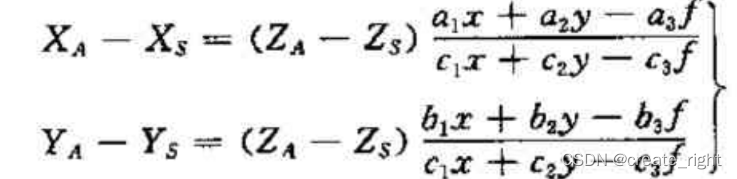
问题:利用单张像片的像点坐标能不能推导出实际地物点的坐标?
答:即使已知了单张像片的所有内外方位元素,也仍然无法确定地物点的空间坐标,因为只有两个方程却需要求解三个未知数。
人有两只眼睛,才能看三维立体景观,因此,如立体视觉的原理一样,只有从不同摄站对同一物体摄影,获得具有一定重叠度的像片对,按照构象方程分别对各像片的同名像点组成条件组,通过解析计算才能求出相应物点的三维空间坐标。
我们把这种按照立体像对与被摄物体的几何关系,以数学计算方式,通过计算机解求被摄物体的三维空间坐标,称之为双像解析摄影测量,它主要研究的内容是:研究立体像对与被摄物体之间的数学关系,以及如何计算被摄物体的三维空间位置。
根据摄得的立体像对的内在几何特性,按照物点、摄站点与像点构成的几何关系,用数学的方法求解物点的三维空间坐标的方法有以下三种:
1、用单张像片的空间后方交会与立体像对的前方交会公式求解物点的三维空间坐标;
2、用相对定向和绝对定向求解地面点的三维空间坐标;
3、采用光束法求解地面点的三维空间坐标。
问题:立体像对中两张像片之间的相对关系一定和它们的绝对位置和姿态有关吗?
答:
法一的实质:恢复了立体像对中两张像片的外方位元素即是恢复了其绝对位置和姿态,重建被摄地面的绝对立体模型。从而获得地面点的空间坐标。
法二的思路:首先暂不考虑像片的绝对位置和姿态而只恢复两张像片之间的相对位置和姿态,这样建立的立体模型称为像对立体模型,其比例尺和方位均是任意的;然后在此基础上,将两张像片作为一个整体进行缩放、平移和旋转,达到绝对位置、这种方法称为相对定向-绝对定向。
光束法将求解外方位元素和待求点的地面坐标合到一步完成,该法理论较为严密。(以共线方程为基础)
上式中除了外方位元素为未知数外,待求点的坐标也是未知数。
一、基本概念
- 内外方位元素:摄影测量中各种坐标系之间的转换参数构成了内外方位元素。
- 共线方程:坐标系旋转关系以及空间相似关系计算得到的方程,实现了用内外方位元素连接物方与像方坐标。
- 后方交会:由于获取摄影外方位元素成本较高,精度较差,故急需一种求解外方位元素的方法。基于共线方程,已知方程式中含有6个未知数,而每个像点可列出两个共线方程,故至少需要3个像点坐标才能解算外方位元素。计算过程即为后方交会。
- 前方交会:根据共线方程,为了求解地面点坐标,需要求解X<Y<Z三个未知量,故至少需要两个像控点,由于同一张像片上的不同像点对应的X<Y<Z不同,故需要立体像对上的同名像点坐标来解算。此解算过程称为前方交会。
前后方交会小结:这种方法求解地面点坐标对地面控制点需求量较大(每张像片都要至少3个像控点来求解外方位元素)。
- 相对定向:在未知立体像对两相机的外方位元素时,可以通过确定两张像片的空间相对位置姿态,使得同名光线对对相交。该工程即为相对定向。两同名光线理论上交于物点。
- 共面方程:根据同名光线相交以及与摄影基线共面可列出方程式,称为共面方程。一对同名点可以列出一个共面方程式。基于共面方程,可见当相机内参及同名像点坐标已知时,共面方程可以用于解求相机外参。
- 连续像对像对定向:其思想是固定左像片,调整右片方位姿态使同名光线对对相交。
- 航带法空中三角测量:对于一条满足重叠要求的航带,利用连续像对相对定向,我们可以连续地恢复像片们与第一张像片的相对关系,把航带像片统一到第一个像空间辅助坐标系里,可形象理解为把许多张像片拼接成一张大像片。
- 绝对定向:绝对定向需实现地面控制点由像空间辅助坐标到摄影测量地面坐标的转化。此过程可由空间相似变换实现。绝对定向包括七个绝对定向元素,包括模型的平移、旋转和缩放。这种坐标变换,在数学上为一个不同原点的三维空间相似变换。
1、含义
空中三角测量是以像片上量测的像点坐标为依据,采用严密的数学模型,按最小二乘原理,用少量地面控制点为平差条件,在电子计算机上求解测图所需控制点的地面坐标。 (解析空中三角测量的出发点:利用少量的外业实测的控制点确定全部影像的外方位元素及加密测图所需的控制点。)
2、分类
按平差范围:
- 单模型法;
- 单航带法;
- 区域网法;
按数学模型:
- 航带法;
- 独立模型法;
- 光束法;
摄影测量中每个立体像对都需要四个控制点,若测区范围内有多个立体像对,则需要大量的地面控制点。
问题:能否只测少量控制点,加密出立体像对所需全部控制点?
答:解析空中三角测量
空中三角测量分类:分为模拟空中三角测量和解析空中三角测量。
航带法空中三角测量:把许多立体像对构成的单个模型连结成一个航带模型,将航带模型视为单元模型进行解析处理,通过消除航带模型中累积的系统误差,将航带模型整体纳入到测图坐标系中,从而确定加密点的地面坐标。
解析空中三角测量目前最常用的方法是区域网平差。
区域网平差是指在由多条航线连接成的区域内进行控制点加密,并对加密点的平面坐标和高程进行的整体平差。
按照构网的方法和平差单元的划分,区域网平差的基本方法有:航带法、独立模型法和光束法。
相对定向-绝对定向:这种方法不直接求出两张像片相对于地面摄影测量坐标系的外方位元素,而是先进行相对定向,确定两张像片相对于左摄站为原点的箱空间辅助坐标系的方位元素--相对定向元素,然后用前方交会方法计算出模型点坐标,建立与地面相似的立体模型。最后进行绝对定向,将立体模型作三维的平移、旋转和缩放,使模型点坐标变换为地面摄影测量坐标。
传统摄影测量,均依赖于人的双眼,确定同名点。数字摄影测量就是要用计算机代替人的双眼,确定同名点。
数字摄影测量:数据获取、定向过程、数字空三、DEM自动提取、数字测绘产品。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









