







统一部件组仿人格斗机器人主要由人形机身和底盘两部分构成,人形机身通过电源接口与底盘相连接。底盘移动速度快、运动精准、双机械臂可模块化快速拆装、并带有机械离合和过流双重保护。可进行体感操作完成各项任务,通过独特算法执行某向特定任务,也可使用动作编辑器编辑机器人相应动作,满足体感人机交互系统设计、底盘移动协同控制。
接下来我们将从此机器人机械结构上特点,算法,策略创新,反思和建议来进行介绍。
1 机械结构
1.1 尺寸参数
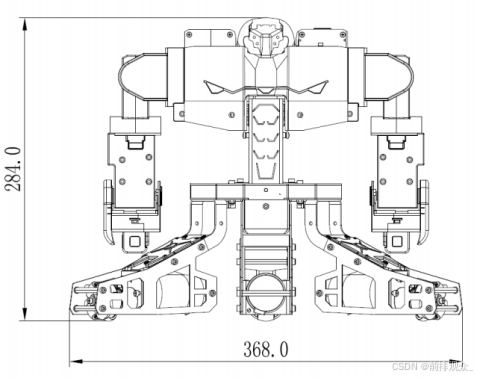
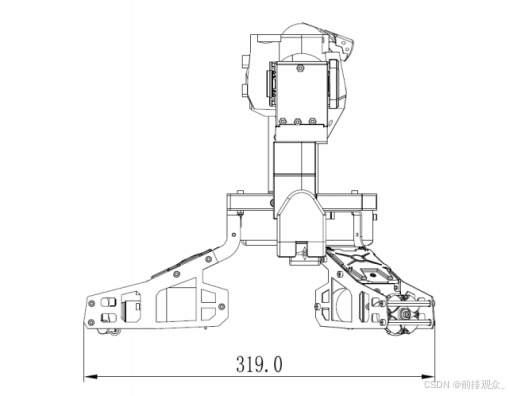
我们设计的机器人尺寸参数为:
总长368.0mm、宽为319.0mm、高为248.0mm(如下图),重量大致为3.3kg。
1.2 基础件制作
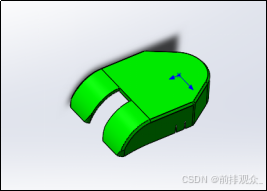
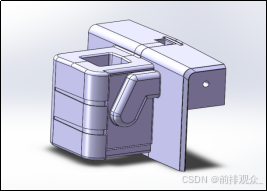
为减轻手臂磨损以及机器人在格斗或者搬运任务时出现的损伤,专门制作了护手,肩壳,手和头部链接件。并且在手的制作中夹持装置用海绵设计,从而达到在搬运任务中更快更好的效果。
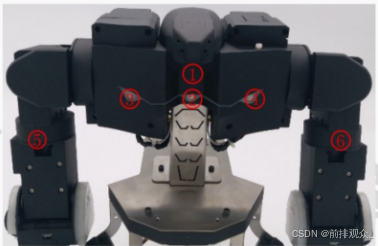
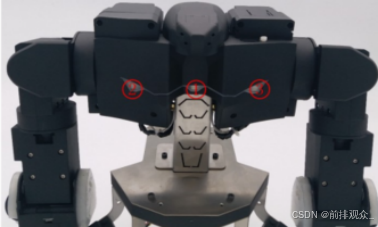
1.3 传感器
在对战模式下,机器人通过传感器识别对方有效攻击和攻击位置,并产生减血或者其他特殊效果。机器人的攻击分为普攻和重击,不同的攻击产生的血量减少程度(根据武器类型而定)不同,在不同的攻击位置产生的效果也有所不同。传感器位置如下图:
1.4 胸前指示灯说明
非战斗模式下,显示 WiFi 连接状态和手臂安装状态
1.5 战斗模式下,血量灯对应的状态
| 机器人状态 | 灯状态 | 机器人当前状态描述 |
| 战斗中 | 绿色常亮,血量越少绿灯越暗。 | 灯会随着血量的减少而变暗。 |
| 战败 | 红色呼吸灯。 | 机器人血量为0. |
1.6 底盘结构分析
(1)全向移动能力
本组人型机器人采用 Omniwheels 全向轮实现机器人的全方位运动。全向轮包括轮毂和从动轮。轮毂的外圆周处均匀开设有3个或3个以上的轮毂齿,每两个轮毂齿之间装设有一从动轮,从动轮的径向方向与轮毂外圆周的切线方向垂直。在全方位运动系统中,全向轮是一种结构简单、适用范围广、可以在较差的路况上运动的新型轮组系统。本组机器人的全向轮细节图如下:

(2)双重保护的舵机
本组机器人在机械设计上的另一大特点是机械臂关节处具有机械离合和过流双重保护功能的舵机。所以在机器人执行击打动作时,击打的反作用力不会对舵机以及机器人造成机械损伤。
(3)底座设计
机器人圆形底座下挂有电池盒,底座由类三足'的三个机械支撑件,彼此间隔 120 度支撑。Omniwheels 全向轮辅助机器人运动,使其能进行 360 度的自由旋转运动和准确度较高的左右平移、前进后退的动作,极大的提高了机器人的灵活性,拓宽了机器人的运动范围和应用领域。
2 体感算法
2.1 体感应用原理
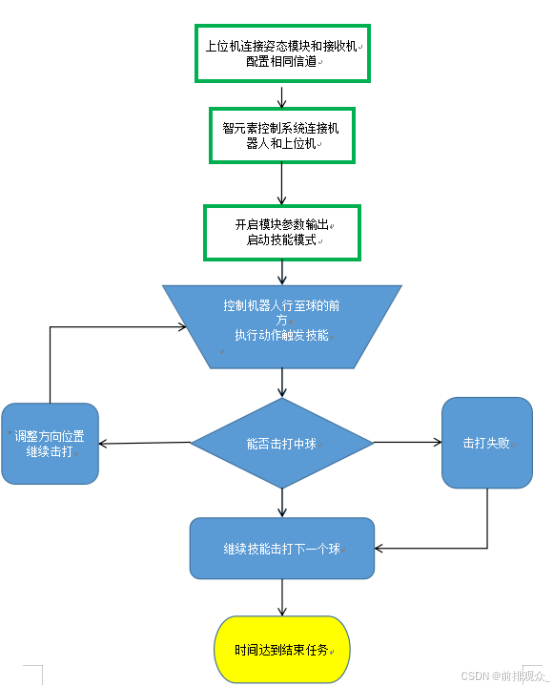
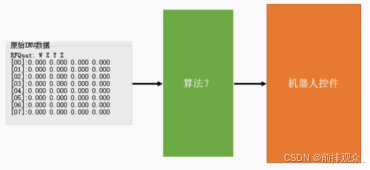
姿态模块通过2.4G无线通信方式将解算好的姿态数据实时发送给接收机,接收机将6个姿态模块的姿态数据发送给计算机,接下来计算机再通过算法将姿态数据计算成智元素格斗机器人相应的舵机参数、底盘控制参数、还有技能参数并通过wifi发送给智元素格斗机器人。任务框图如下:
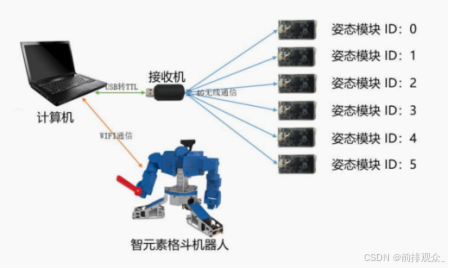
无线姿态模块是一款 9 轴姿态传感器,它集成了先进的算法以及校准技术,直接输出全姿姿态数据。接收机专门用于接受一个或者多个无线姿态模块的数据,配置数据输出协议、输出速率、模块 ID 等信息,方便与上位机通信。对姿态模块的ID(0-7)和信道号(0-4)进行配置,而对接收机配置信道号,使得姿态数据通过信号道传入计算机。
2.2 上位机软件
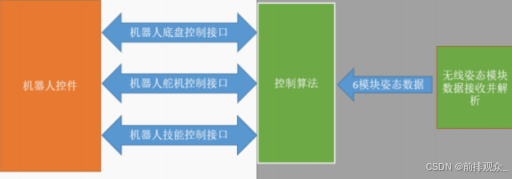
程序整体框架如下:首先接收无线姿态模块的数据并解析,然后将 6 模块的姿态数据(四元数) 传给机器人控制算法,经过控制算法的解算后就能输出机器人的相关控制数据,最后将相关控制数据传给机器人控件达到控制机器人的目的。
2.3 智元素控制系统
当计算机和机器人连接完成之后,应用智元素控制系统和体感控制应用Demo。

查看ip地址,将体感应用 demo 连接到智元素控制系统软件。
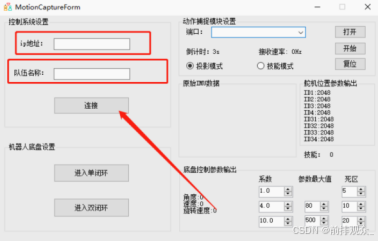
完成对“机器人列表”和“客户端列表”的连接,绑定机器人。然后可进行单机对战模式或者局域网对战模式。

















 3082
3082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









