







统一部件组仿人格斗机器人主要由人形机身和底盘两部分构成,人形机身通过电源接口与底盘相连接。底盘移动速度快、运动精准、双机械臂可模块化快速拆装、并带有机械离合和过流双重保护。可进行体感操作完成各项任务,通过独特算法执行某向特定任务,也可使用动作编辑器编辑机器人相应动作,满足体感人机交互系统设计、底盘移动协同控制。
接下来我们将从此机器人机械结构上特点,算法,策略创新,反思和建议来进行介绍。
4 独特创新点策略及相应算法
4.1 技能击打
由于手臂的自由度和姿态模块的自由度不同,机器人难以复刻人的动作,存在较大的不准确性,故通过技能模式完成任务的击打,即通过完成某一动作触发相应技能。通过机器人动作编辑器编辑相应击打动作,初始状态时右臂往前,手腕内扣,待机器人靠近待机打乒乓球时,触发技能击打乒乓球。

4.2 代码控制手臂
由于场地位置大小有限,障碍物分别位于固定在以场地为中心,边长1000mm的正方形的四个角,此时通过改正代码将左臂位置固定防止张开手臂时触碰到物块。
在算法处理完成姿态数据传出控制数据时,为保证左臂位置固定,在代码中将左臂对应的4个函数值重新赋值,使之不受到实时参数数据的影响而发生改变。
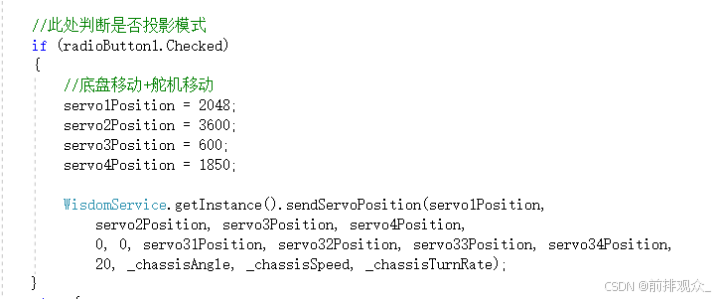
4.3 投影技能混合模式
为提高机器人的灵活度和创新性,我们在小组讨论中讨论代码作用,得出混合技能和投影模式的算法。
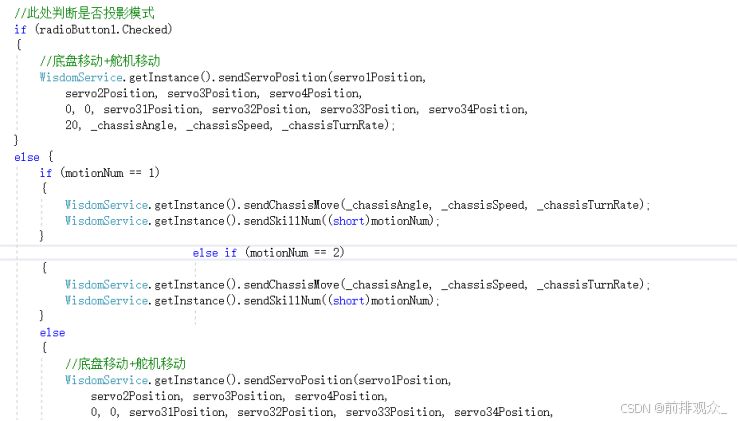
在原本的技能模式中用if语句以触发技能,用else语句实现对实时参数数据的传入和处理,这样来实现技能模式下的投影模式。
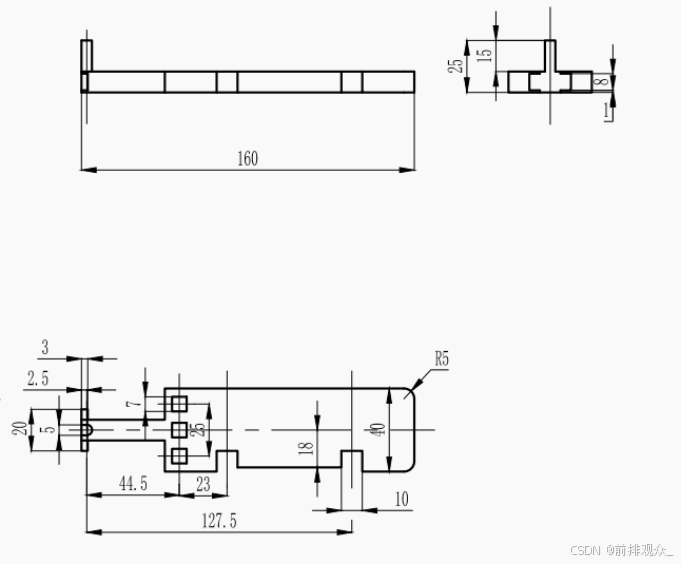
4.4 副武器创新
在对战系统中完成格斗项目,为减少血量丢失。我们制作副武器保护前方传感器不被击打,同时将左手手臂的姿态位置固定,右手连接主武器实现击打,为此我们特意制作如下副武器。
在一些特定的任务中,也需要机器人完成对特定物块的搬运,例如10*15*35的物块,为又快又好地完成此任务,我组队员讨论将左手的姿态固定,与胸成直角,当机器人接近物块时,只需眼睛观测到左手卡近物块范围内,然后完成动作触发技能,让右手完成相应夹持动作,便可轻易将物块搬起,减少了底盘对准工作,更加便捷

















 3085
3085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









