







常用函数和类
创建矩阵
Matrix<类型,行,列> 对象名称;
Matrix<float,2,3> matrix_23;
生成一个float类型的,行为2,列为3的矩阵VectorNd 对象名称;(N为生成的向量的维度)
Vector3d v_3d;
//创建一个三维向量对象
等价与
/*
Matrix<float,3,1> vd_3d;
*/初始化矩阵
静态分配
Zero();将矩阵各元素全部初始化为0
Matrix3d matrix_33 = Matrix3d::Zero();//初始化为0动态分配
Matrix<double,Dynamic,Dynamic> matrix_dynamic;//动态大小矩阵强制转化矩阵类型
不能混合两种矩阵类型,当运算的矩阵类型不同时需要使用强制转换
cast<New_Data>()强制转化为New_Data
Matrix<double,2,1> result = matrix_23.cast<double>()*v_3d;
//cast<New_Data>()强制转化为New_Data输入与输出
输入元素
matrix_23<<1,2,3,4,5,6;
//批量输入,输入的个数必须符合矩阵的大小
matrix_33(0,1)=1;
//单个输入,注意到矩阵行和列的开始都是从0开始的输出元素
cout<<"matrix 2x3 from 1 to 6: \n"<<matrix_23<<endl;
//输出整个矩阵
cout<<"matrix 2x3 (1,1) \n"<<matrix_23(1,1)<<endl;
//用()访问单个元素 矩阵常用的各类方法
matrix_33=Matrix3d::Random();//随机数矩阵
cout<<"sum:"<<matrix_23.sum()<<endl;//求各元素和
cout<<"trace:"<<matrix_33.trace()<<endl;//迹 主对角线上各元素诉讼诉元素之和
cout<<"det : "<<matrix_33.determinant()<<endl;//行列式解方程
对于matrix_NN ∗ x = v_Nd方程,可以采取许多不同的分解方法,直接求逆的方法是运行时间最长的
QR分解法

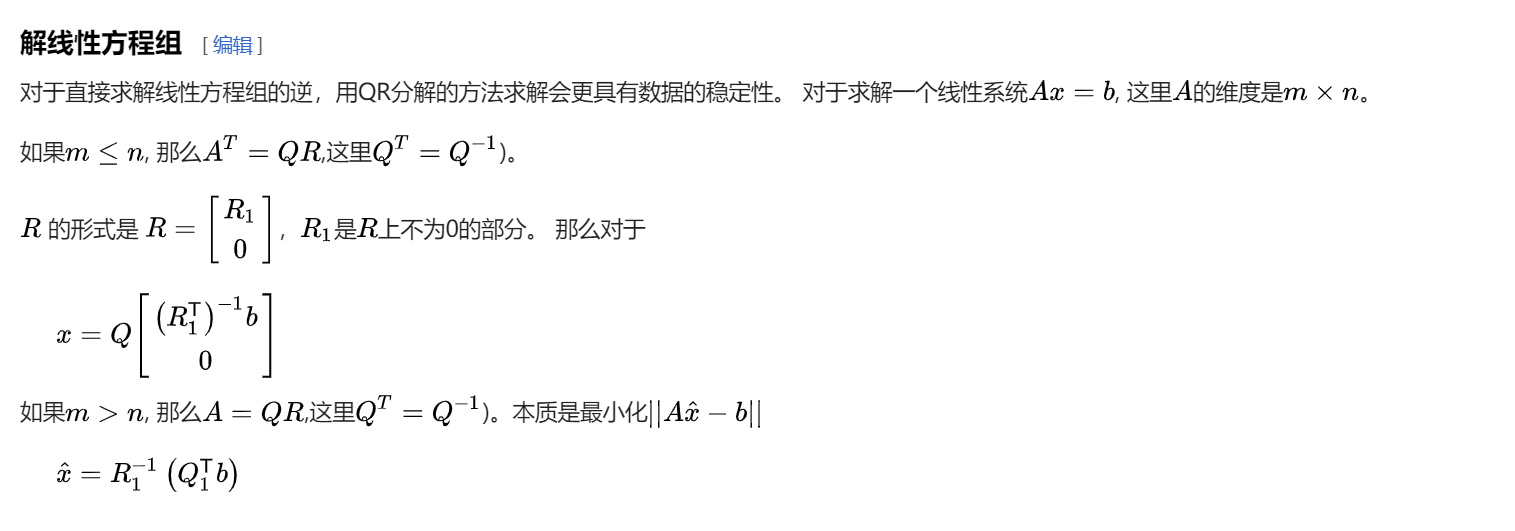
matrix_NN.colPivHouseholderQr().solve(v_Nd);Cholesky 分解法
对于正定矩阵可以采用 Cholesky 分解法
x = matrix_NN.ldlt().solve(v_Nd);















 249
249











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









