







 这篇博客详细介绍了ET2046芯片,包括其功能特点、管脚配置、模拟输入、内部参考、温度及电池电压测量、压力监测、数字接口、控制字等方面,适用于低电压I/O触摸屏控制。此外,还涵盖了转换模式、电参数和封装尺寸等关键信息。
这篇博客详细介绍了ET2046芯片,包括其功能特点、管脚配置、模拟输入、内部参考、温度及电池电压测量、压力监测、数字接口、控制字等方面,适用于低电压I/O触摸屏控制。此外,还涵盖了转换模式、电参数和封装尺寸等关键信息。
目录
1. 概述
ET2046
是
4
线触摸屏控制器,支持
1.5V
~
5.5V
的低压
I/O
接口。
ET2046
具有内置
2.5V
电压源,可用于辅助输入、电池监测和温度检测模式的测量。在不使用时,也可将内置电压源关闭以节约电力。内置电压源最低可工作于 2.7V
电源电压,同时可检测
0V
~
6V
的电池电压。
由于
ET2046
有着低功耗(在电源电压为
2.7V
时小于
0.75mW
)、高速度(最高采样率可到
125KHz
)和内置芯片驱动等特点,使其成为带电阻式触摸屏的个人数字助理(PDAs
)、
BP
机、移动电话和其它便携式设备的理想选择。ET2046
可工作于
-40
℃~
85
℃。
2. 功能特点
管脚与
ADS7846
兼容
工作电压:
2.2V
~
5.25V
1.5V
到
5.25V
数字
I/O
接口
内置
2.5V
电压源
可直接测量电池电压(
0V
~
6V
)
片上内置温度测量
触摸压力测量
QSPI
TM
和
SPI
TM
3
线接口
自动节电
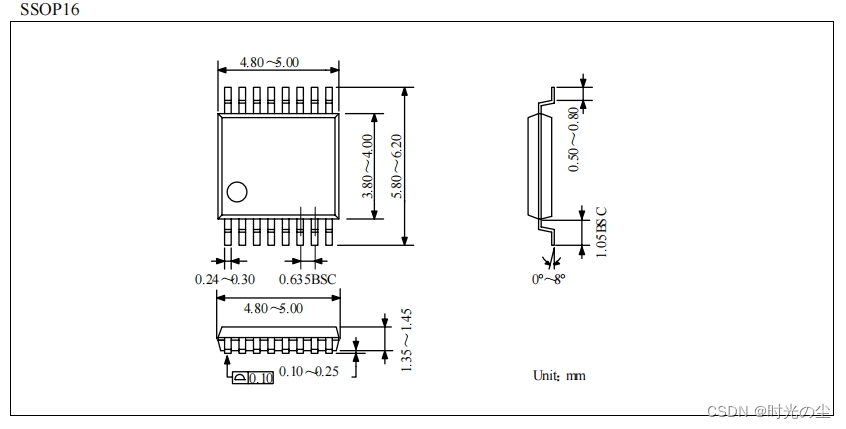
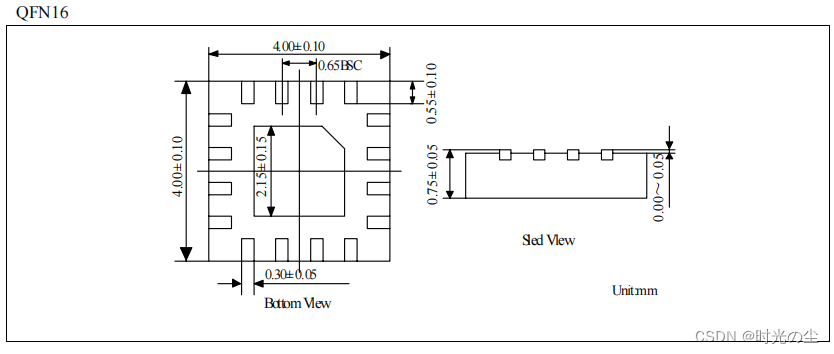
封装形式:
SSOP16(ET2046S)
,
QFN16(ET2046Y)
3. 管脚排列图

4. 管脚说明

5. 功能框图

6. 功能说明
ET2046
是一个经典的逐次逼近寄存器模数转换器(
SAR ADC
)。此架构基于电荷重分配原理,固有采样保持功能。
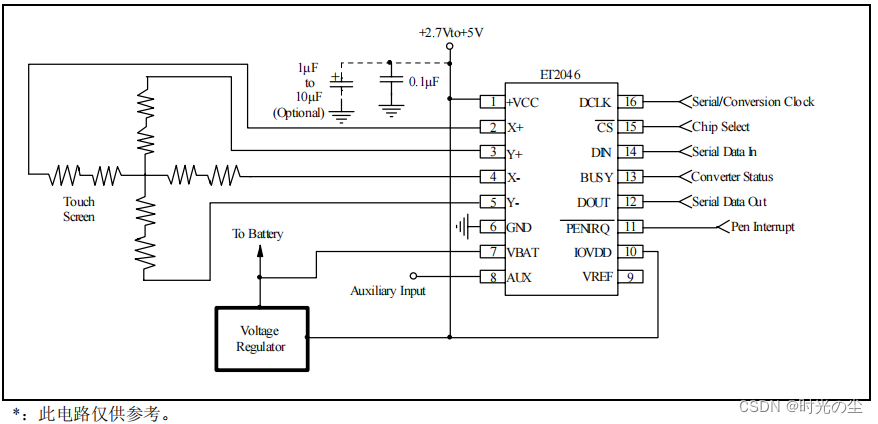
ET2046
的基本工作原理如下图所示。此器件内置一个
2.5V
的电压源,使用外部时钟,可用
2.7V
到5.25V 的电源供电。内部源可被外部低阻抗
1V
到
+VCC
的电压源所驱动。源电压的值直接决定了转换器的输入范围。
转换器的模拟输入(
X-
,
Y-
和
Z
坐标,辅助输入,电池电压和芯片温度)通过一个多路选择器提供。一个独特的低导通电阻触摸屏驱动开关允许一个未被选择的 ADC
输入通道为外部器件提供电源,另一个相邻的通道提供地,例如触摸屏。通过维持转换器的差分输入和差分参考结构,可减低触摸屏驱动开关导通电阻所带来的误差(若这是特定测量条件下的一个误差来源)。
7. 模拟输入

图
1
模拟输入
上图展示了
ET2046
上的多路输入选择器,
ADC
的差分输入和转换器的差分参考方式。表
1
和表
2
显示了 A2
、
A1
、
A0
和
SER/
DFR
控制字之间的关系及
ET2046
的配置。此控制字由串口
DIN
提供。当转换器进入保持模式,+IN
和
-IN
输入的电压差由内部的电容阵列所捕获。模拟输入的电流由器件的转换速率所决定。在采样周期,源必须对内部采样电容(典型值为 25pF
)充电。在电容完全充电后就不会再有输入电流。从模拟源到转换器的传输速率是一个转换速率的函数。

表 1 输入配置(DIN),单端参考源模式(SER/ DFR 为高)

表 2 输入配置(DIN),差分参考源模式(SER/ DFR 为低)
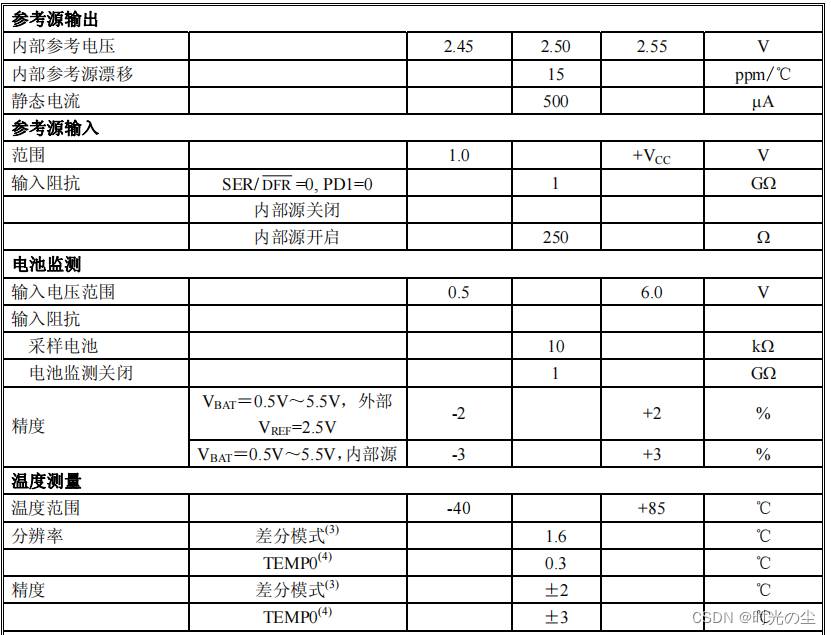
8. 内部参考
ET2046
内置一个
2.5V
的电压参考源,可通过控制字
PD1
开启和关闭。一般此参考源只用于单端模式下的电池监测、温度测量和辅助输入的测量。而差分模式下可优化对触摸屏的测量。为了与 ADS7843
兼容,内部参考电压源必须关闭。因此,在上电后,必须写入一个 PD1=0
来保证源的关闭。

图
2
内部源的简化图
9. 参考输入
在
+REF
和
-REF
之间的电压差决定了模拟输入的工作范围。
ET2046
在
1V
~
+V
CC
电压源下工作。有几处与电压源输入和其宽电压范围相关的关键点需要注意。当源电压下降时,每一个数字输出码所对应的模拟输入值也相应下降。这与最低有效位(LSB
)相关,
1LSB
对应于在
12Bit
模式下的源电压除以
4096
的值。当源电压下降时,由于 LSB
的值也降低,导致此
ADC
固有的失调误差和增益误差将上升。例如,在2.5V 电压源下转换器的失调误差为
2LSBs
,而在
1V
的电压源下其误差可达
5LSBs
。但在两种情况下,器件失调误差的绝对值是相同的,都为 1.22mV
。在较低的参考电压下,其版图必须仔细设计,有增加足够的滤波电容,使用低噪声、低 ripple
的电源供电,若使用外部电压参考源,必须使用低噪声参考源,并且要用低噪声的输入信号。
输入
V
REF
口的电压直接驱动数模转换器(
CDAC
)的电容部分。故输入电流极低(典型值
<13μA
)。这儿有几个有关屏蔽测量但开关驱动导通时的参考源的关键点需要注意。为便于说明,请参见图 1
。此应用图表示了 ET2046
用于测量电阻式触摸屏。为测量设备在
Y
方向上的当前值,需要将
X+
输入连接到
ADC
,打开 Y+
和
Y-
驱动,再量化
X+
上的电压(见图
3
所示的模块图)。对这一测量,
X+
引线电阻并不影响转换(它影响建立时间,但此阻值一般很小其影响可忽略)。但是由于 Y+
和
Y-
间的电阻相当低,
Y
驱动的导通电阻会有一些影响。综上所述,不管触摸屏上的触点设备指在哪儿都不能使输入为 0V 或全量程,因为一些电压已经损失在内部开关上了。另外,内部的开关电阻并不会和触摸屏的电阻联动,因此增加了一个额外的误差源。
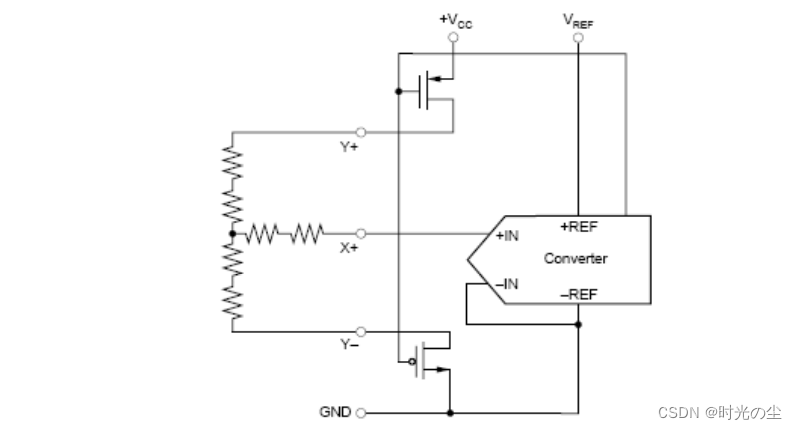
图3
单端参考源的简化框图(
SER/
DFR
=1
,
Y
开关使能,
X+
模拟输入)
这一情况可由图
5
所示来补救。在置
SER/
DFR
=0
后,
+REF
和
-REF
直接连在了
Y+
和
X+
上,相应地使模数转换器进入比率转换状态。转换的结果将是外部电阻的百分比,而与外部电阻和内部开关导通电阻比率的变化无关。注意在使用比率模式时要考虑到功耗问题。

图4
差分参考源的简化框图(
SER/
DFR
=0
,
Y
开关使能,
X+
模拟输入)
差分模式下需要注意的最后一点是必须使用
+V
CC
而不是
V
REF
作为
+REF
的源。在不需要用比率模式时,可以使用高精度的参考源和单端模式来测量。在特定情况下,可以从一个高精度参考源来启动转换器。大多数的参考源都可以为 ET2046
提供足够的电力,但可能不能为外部负载(如电阻式触摸屏)提供足够的电力。
10. 触摸屏的建立
在某些情况下,可能需要在触摸屏上跨接电容来消除触摸屏工作时产生的噪声(例如从背光电路或LCD 面板上产生的噪声)。这些电容提供了一个低通滤波器来减小噪声,但在屏被触摸时会引起建立时间的问题,通常会表现为一个增益误差。要消除或减轻这一影响有几种方法。问题的症结在于输入和(或)参考源在 ADC 采样输入并提供数字输出时并没有达到最终的稳定值。另外,参考源在转换过程中可能还在变化。第一种选择是在要求的触摸屏建立时间内停止或减慢 ET2046 的 DCLK 信号。这就使得输入和参考源在确认周期(ET2046 中为 3 个时钟周期,见图 8)中能达到稳定值。这在单端模式和差分模式下都可以使用。第二种选择是使 ET2046 只在测量触摸屏时工作在差分模式下并配置 ET2046 使其始终处于工作状态(触摸屏驱动开启)而不进入 Power-Down 状态(PD0=1)。根据建立时间得要求和 ET20460 的速率进行数次转换。一旦达到需要的转换次数,则处理器命令 ET2046 在进行最后一次转换后进入 Power-Down状态。这一过程可在 X 方向,Y 方向和 Z 方向的测量中实现。第三种选择是使器件工作在 15 个时钟每转换周期的模式下,以此可使 ADC 保持连续工作状态,保持触摸屏驱动始终打开直到从处理器收到停止指
令。
11. 温度的测量
在某些应用下(如电池充电时)需要测量绝对温度。
ET2046
的温度测量技术源自一个工作在固定电流下的半导体结的特性。二极管结的正向电压(V
BE
)与温度有着很好的相关性。在实际应用时,可通过已知 25
℃时
V
BE
的值并监测
V
BE
随温度变化时的偏移值就可得到此时的绝对温度。
ET2046
提供了两种工作方式。第一种模式需要有一个在已知温度下的电压值作为标准,但只需要一次测量就可得到绝对温度值。在这一测量过程中会使用一个二极管(开启)。在 20
℃并有
20μA
的电流流过二极管时,此电压的典型值为 600mV
。此二极管电压的绝对值会有
mV
级的偏差。然而,此电压的温度系数(
TC
)是很固定的,为2.1mV/℃。在最终的产品测试中,为了记忆用作标准的此特定电压,器件将会被存储在一个已知室温的房间中。此种方式下可使测量的结果精度达到 0.3
℃
/LSB
(在
12-Bit
模式下)。
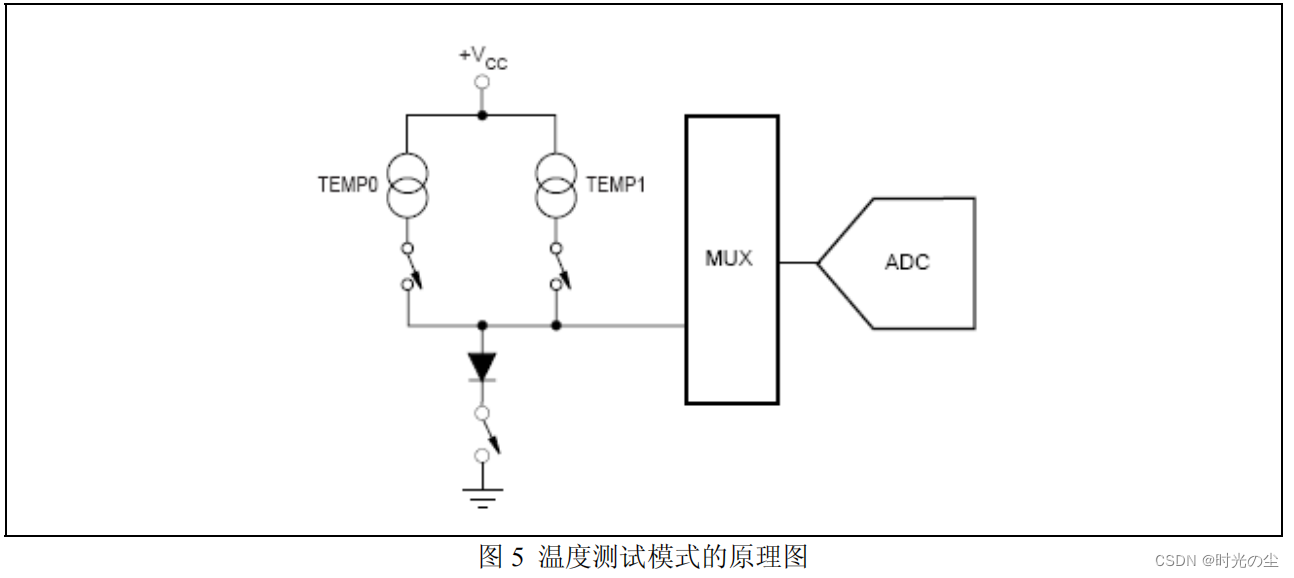
度。此模式下需要有第二次转换,此时流过二极管的电流将是第一次的
91
倍。第一次和第二次转换
的压差由下式
(1)
所表示:
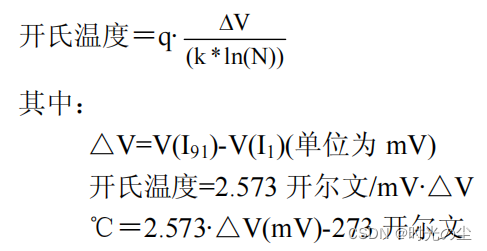
其中:
N
为电流比值
=91
K=
玻尔兹曼常数(
1.38054·10
-23
电子伏
/
开尔文温度)
q=
电子电量(
1.602189·10
-19
C
)
T=
开氏温度
这一模式以降低精度为代价提供了一个测量温度的改进方法。求解开氏温度的方程为:
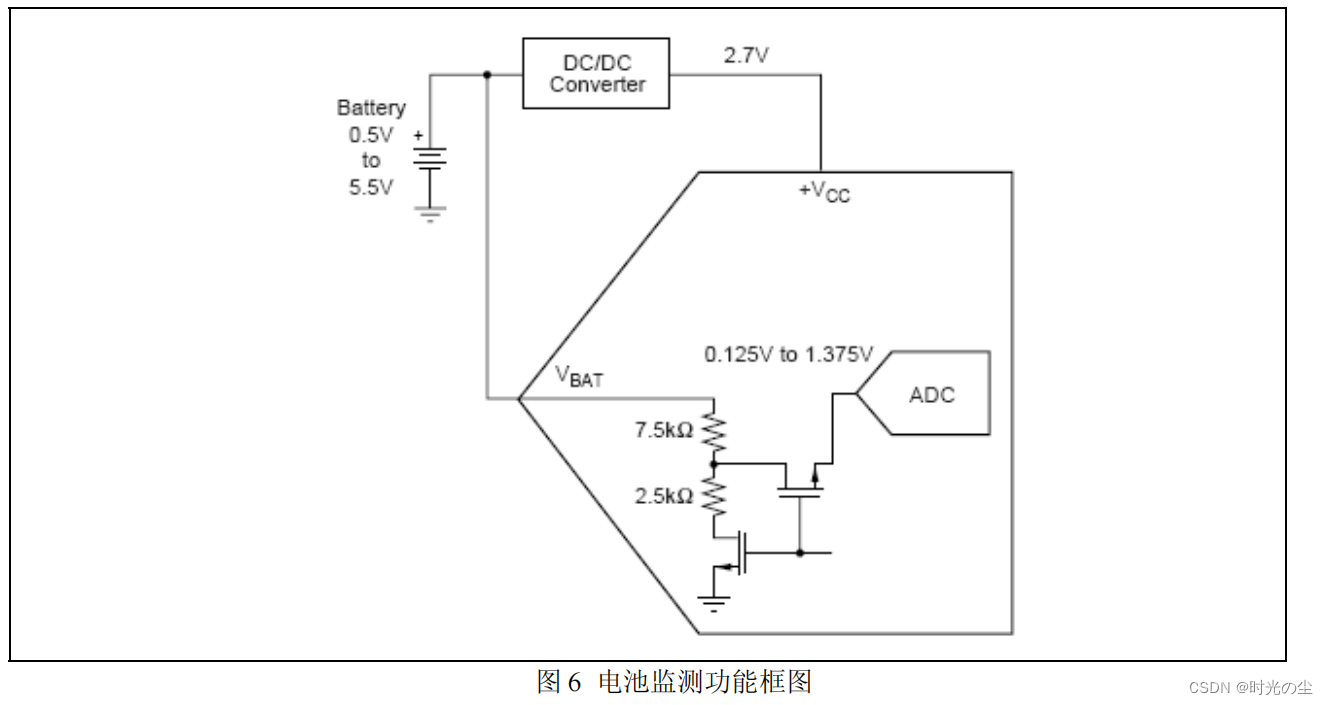
12. 电池电压的测量
ET2046
具有在稳压器(
DC/DC
转换器)的一边监测电池电压的能力,见图
6
。电池电压可从
0V
变化到 6V
,同时保持供给
ET2046
的电压为
2.7V
或
3.3V
等。输入电压被除以
4
故
5.5V
的电池电压输入到
ADC中是 1.375V
。这样就简化了多路选择器和控制逻辑。为了使功耗达到最小,此分压器只在
A2=0
,
A1=1和 A0=0
时的采样周期中才工作。
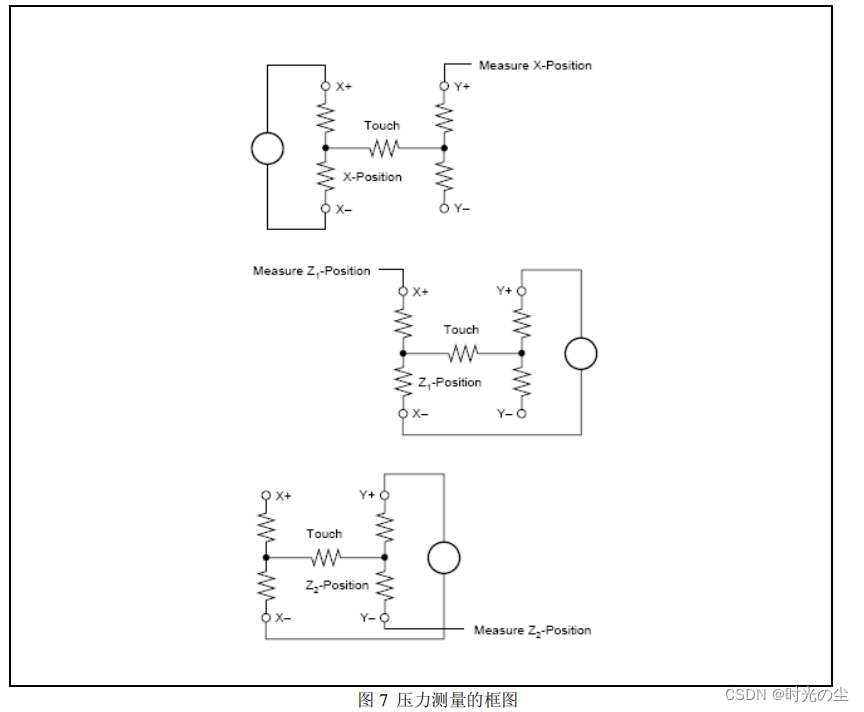
13. 压力监测
使用
ET2046
同样也可以监测触摸的压力。为了区别是用手还是用笔触屏,需要测量触摸的力度。一 般情况下,此测量不需要很高的精度,故推荐使用 8-Bit
精度模式(但现所示的计算过程以
12-Bit
精度模式为例)。有多种方法来测量压力。ET2046
支持其中的两种方法。
第一种方法需要已知
X
平面的电阻,测量 X
的位置并加测触摸屏上的两个额外平面位置(
Z1
和
Z2
),如图
7
所示。利用方程
(3)
即可计算触摸电阻:

第二种方法需要已知
X
平面和
Y
平面的电阻,测量
X
方向,
Y
方向的位置和
Z1
。利用方程
(4)
也能得到触摸电阻:

14. 数字接口
ET2046
数字接口的典型工作方式见图
8
。
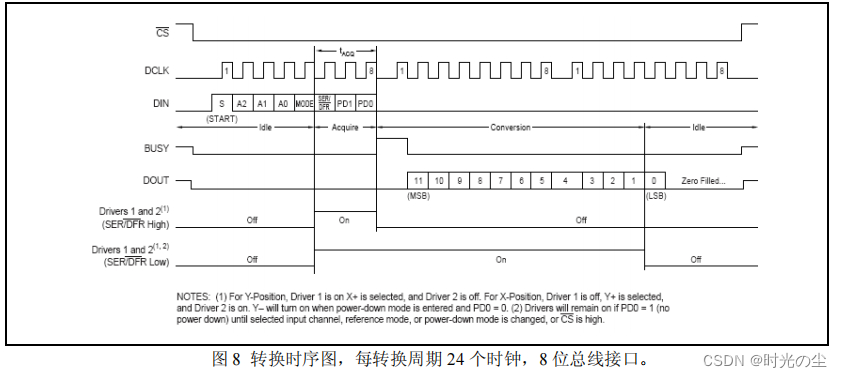
此图假设数字信号源于一个带有串口的微控制器或数字信号处理器。在处理器和转换器之间的每一次通信,例如 SPI
,
SSI
或
Microwire
TM
同步串行接口,都由
8
个时钟周期组成。一次完整的转换可由
3
次串口通信完成,在 DCLK
共输入
24
个时钟周期。
前
8
个时钟周期用于通过
DIN
口提供控制字。当转换器得到足够的信息来配置多路选择器和参考源输入后,此器件进入确认(采样)模式,如果需要会开启触摸屏驱动口。再过 3
个时钟周期后,控制字的传输完成,转换器进入转换模式。此时,输入采样-
保持进入保持模式同时触摸屏驱动口关闭(在单端模式下)。接下来的 12
个周期完成实际的模数转换。若转换为比率模式(
SER/
DFR
=
0
),驱动口在转换过程中保持开启同时需要第 13
个时钟周期来完成最后
1Bit
的转换。需要额外的
3
个周期来完成最后一字节(
DOUT将为低),此三个周期被转换器所忽略。
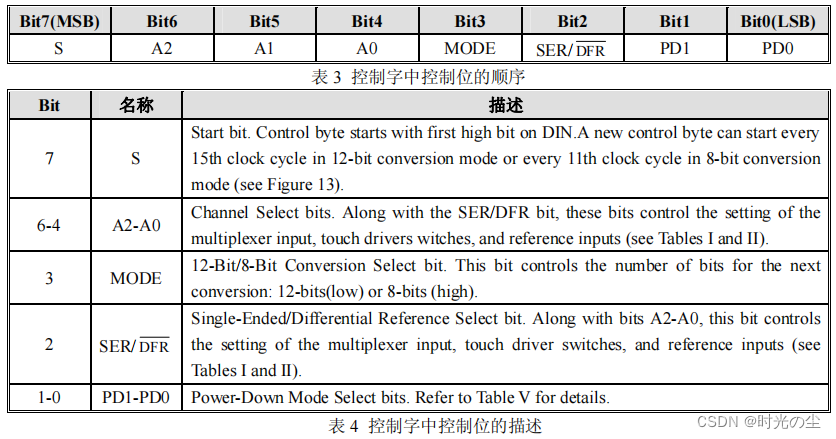
15. 控制字
控制字
(加在
DIN
端口)提供了
ET2046
的以下信息:开始转换标志位,地址,
ADC
的精度,配置方式和 Power-Down
模式的选择,见表
3
。图
8
,表
3
和表
4
给出了详细信息。
起始位
—
第一位(即
S
位)必须保持为高来表示控制字开始传输。在未侦测到起始位时
ET2046
会忽略 DIN
脚上的所有输入。
地址位
—
接下来的
3
位(
A2
、
A1
、
A0
)决定了输入多路选择器(见表
1
、表
2
和图
2
)的输入通道,触摸屏的驱动和参考源的输入。
模式位
—
模式位设置了
ADC
的精度。此位为低,接下来的转换以
12-Bit
模式进行;此位为高,则接下来的转换以 8-Bit
模式进行。
SER/ DFR 位
—SER/
DFR
位控制了参考源的模式,是用单端模式(此位为高)还是用差分模式(此位为低)。差分模式也被称为比率模式,当用于测量 X
方向,
Y
方向和触摸压力时将会优于单端模式。参考源电压来自开关驱动器的电压,此电压与加在触摸屏上的电压几乎一样大。在此情况下,ADC
的参考电压就是跨接在触摸屏上的电压,就不再需要独立的参考源电压。在单端模式下,转换器的参考电压总等于 V
REF脚和 GND
脚间的电压差(详见表
1-2
,图
1-4
)。若在单端模式下测量
X
方向,
Y
方向和触摸压力就需要外接参考源。ET2046
同时也必须由外部参考源供电。当使用单端模式时必须当心
ADC
的输入电压不能超过内部参考源的电压值。特别是在电源电压大于 2.7V
时。
注意:差分测量模式只适用于
X
方向,
Y
方向和触摸压力的测量。测量其他的值都需要单端模式。
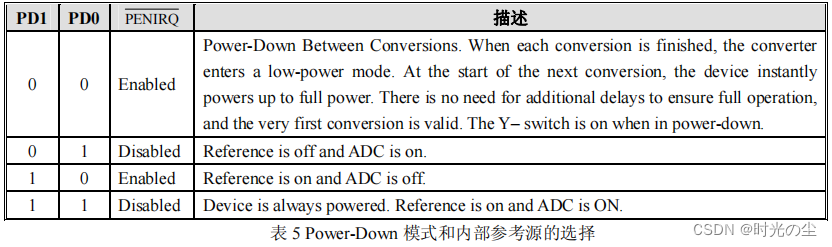
PD0
和
PD1
位
-
表
5
描述了
power-down
模式和内部基准源的配置方式。内部参考源能在不影响
ADC
的情况下开启和关闭。这就在转换进行之前使内部参考源能有额外的时间建立其电压值。ADC
不需要额外的建立时间就可以立即工作。为了关闭内部参考源,在通道转换完成后需要向 ET2046
写入一个额外的指令。
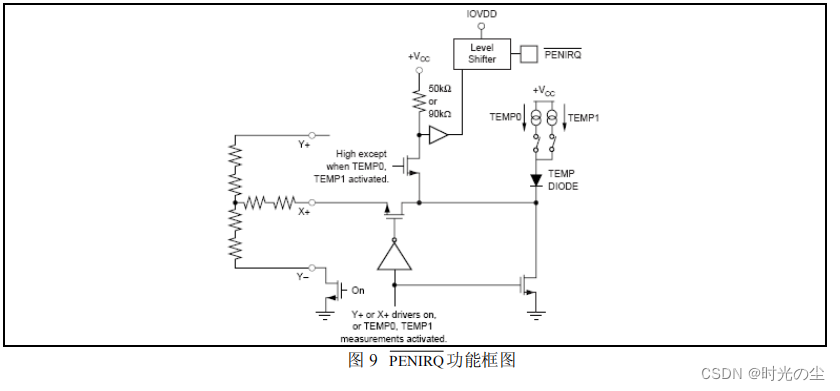
16. PENIRQ 输出
图
9
示意了笔中断的输出功能。当在
Power-Down
模式下并且
PD0=0
时,
Y
驱动导通将触摸屏的
Y
方向接地。 PENIRQ
输出通过两个传输门连接到
X+
输入。当屏幕被触摸时,
X+
输入通过触摸屏被拉到地。
在
ET2046
中,内部上拉电阻一般为
50kΩ
,但此值随着温度和制程的变化会在
36kΩ
和
67kΩ
之间变化。为了确保 PENIRQ
能达到
0.35*(+Vcc)
的逻辑低电平,连在
X+
和
Y-
间的总电阻必须小于
21kΩ
。
PENIRQ
通过在触摸屏到地的通路上泻放电流来达到低电平,以此产生一个给处理器的中断。在
X+
, Y+和
Z
方向的测量周期,
X+
输入与
PENIRQ
上的内部上拉电阻断开。这样就可以消除从内部上拉电阻通过触摸屏到地的漏电流(此电流会导致测量误差)。
另外,
PENIRQ
信号在测量
X+
,
Y+
和
Z
方向时被禁止并保持为低。
PENIRQ
信号在测量电池,辅助输入和温度时被禁止并保持为高。若写入 ET2046
的指令的最后一个字节中的
PD0=1
,则笔中断输出功能被禁止,因此不能探测出触摸屏是否被触摸。在此情况下,为了重新使能此信号必须对 ET2046
写入一个带PD0=0 的控制字。若写入
ET2046
的最后一个控制字包含
PD0=0
,则在此转换结束后笔中断功能使能。转换的结尾在转换数据的 Bit1
送出
ET2046
的时钟
DCLK
的下降沿发生后。
我们推荐在处理器送控制字给
ET2046
时屏蔽
PENIRQ
中断。以此可以在本部分讨论的情况下使
PENIRQ输出不会误触发。
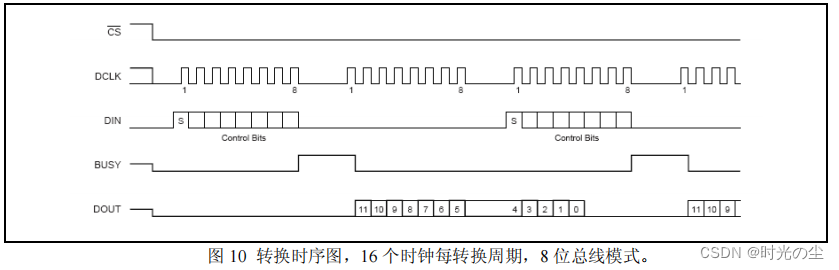
17. 16 个时钟每转换周期
如图
10
所示,转换
n+1
的控制字能紧接着转换
n
输入,以此可达到
16
个时钟每转换周期。此图也显示了处理器和转换器之间的串口通信的格式。有此图知每一个转换可在开始后 1.6ms
完成。否则在采样保持电容上的电压将会显著下降从而影响转换的结果。
对特定的串口无需
DCLK
延迟
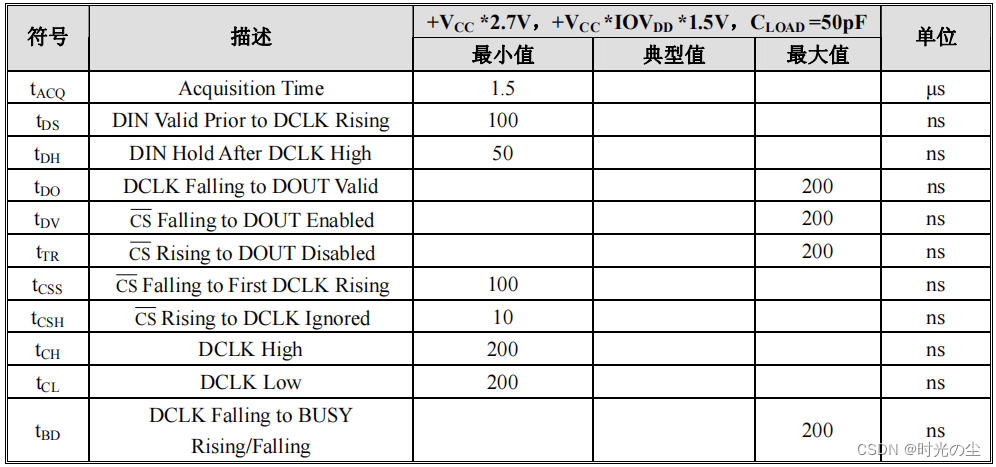
18. 数字时序
图
8
,图
11
和表
6
提供了
ET2046
数字接口的详细时序。
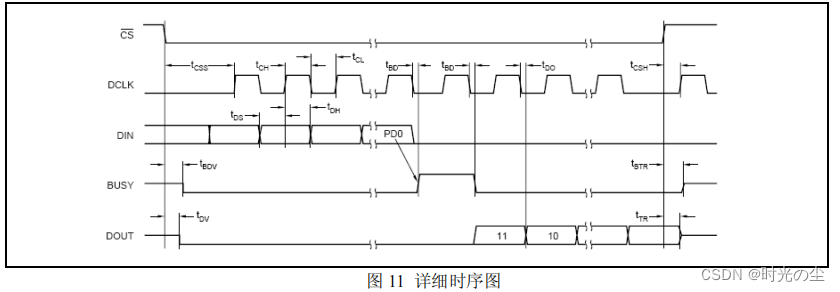

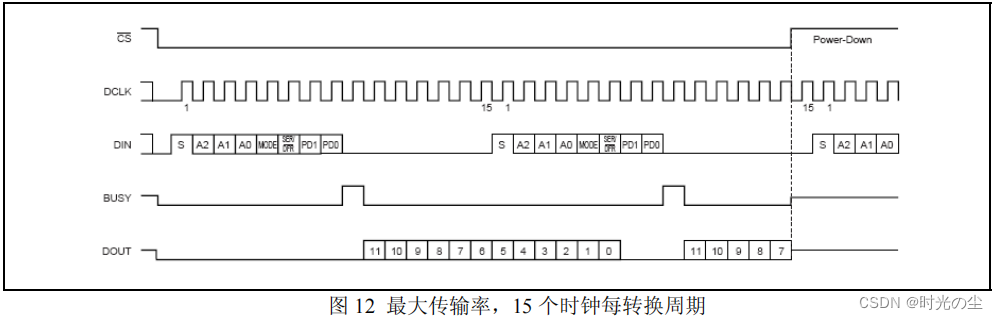
19. 15 个时钟每转换周期
图
11
提供了
ET2046
最快的时钟方式。此方式不适用于大多数的微控制器和数字信号处理器,因为它们不具有提供每信号传输周期 15
个时钟的能力。然而,此方式可适用于现场可编程门阵列(
FPGAs
)或专用集成电路(ASICs
)。注意,此方式大大增加了转换器的最大转换速率。
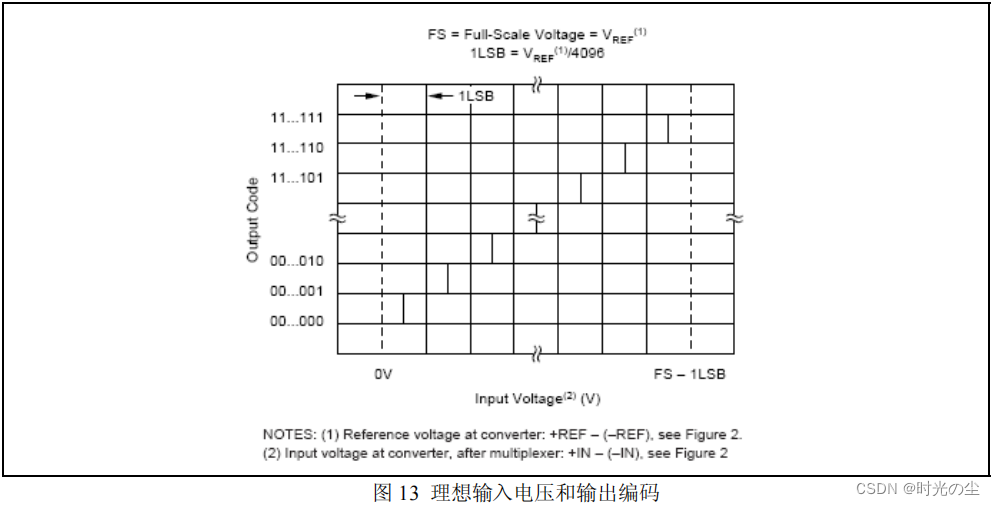
20. 数据格式
ET2046
直接以二进制格式输出数据,如图
13
所示。此图显示了相对于给定输入电压的理想输出编码,不包括失调、增益误差和噪声的影响。
21. 转换模式
ET2046
提供了一种
8Bit
转换模式,以用于需要高速转换但对数字结果的精度要求不高的场合。在切换到 8Bit
模式后,每次转换可提前
4
个时钟周期完成。以此不仅使每次转换减少了
4
位(加快
25%
),同时每次转换能以更快的速度发生。这是因为 ET2046
的内部建立时间不再非常关键
——
需要建立到高于
8 位的精度值。时钟速率最高可加快 50%
。更快的时钟和更少的时钟周期将会使转换速率最高可提高
1
倍。
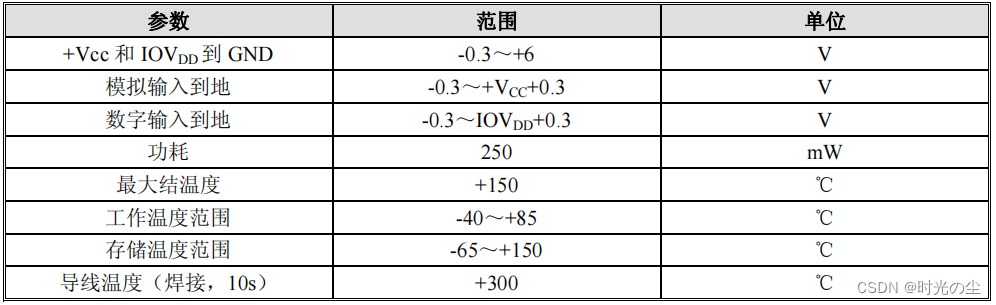
22. 极限参数
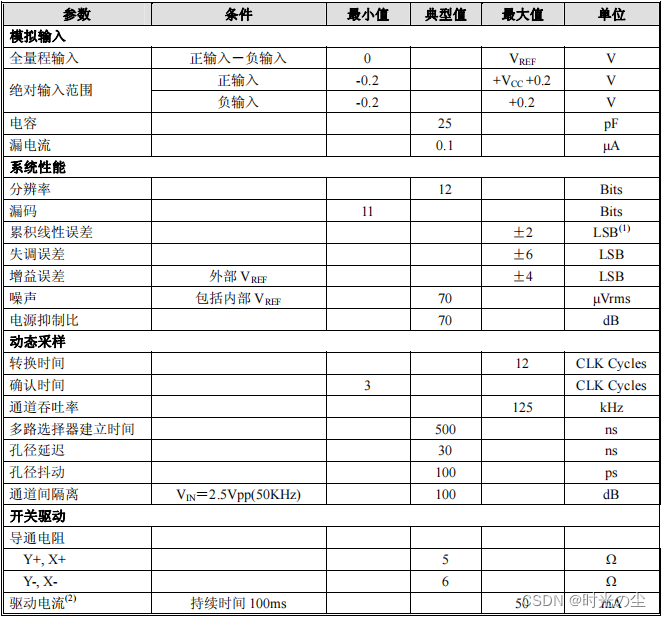
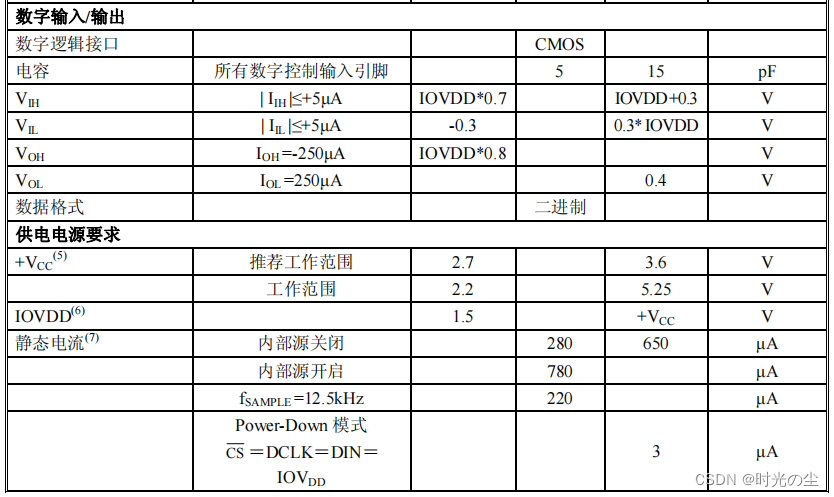
23. 电参数
(如未说明, 测试条件为:=-40℃~+85℃, +
=+2.7V,
=2.5V 内部电压,
=125kHz,
=16*
=2MHz,12-bit 模式,数字输入=GND 或
,+
必须是*
)

注:
(
1
)
LSB
表示最低有效位。在
V
REF
=2.5V
时,
1
个
LSB=610μV
。
(
2
) 由设计时所确定,但未经过测试。超过
50mA
的电流可能会导致器件失效。
(
3
) 测量
TEMP0
和
TEMP1
的差值,不需要标准值。
(
4
) 温漂为
-2.1mV/
℃
.
(
5
)
ET2046
工作电压可低至
2.2V
。
(
6
)
IOV
DD
必须是
-(+V
CC
)
。
(
7
) 包括
+V
CC
和
IOV
DD
的电流,典型值是从
PD0
=
0
时
AUX
口作输入的转换中得到。
24. 参考应用线路图
25. 封装尺寸



















 3316
3316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











