







课题名称:基于模拟退火算法求解机器人最短路径规划问题(栅格地图)
版本日期:2024-03-20
代码获取方式:
QQ:491052175
VX:Matlab_Lover
模型简介:
基于模拟退火算法求解机器人最短路径规划问题(栅格地图)的仿真结果
仿真结果:

初始解的路径规划图

收敛曲线:
模拟退火算法求解的路径规划图
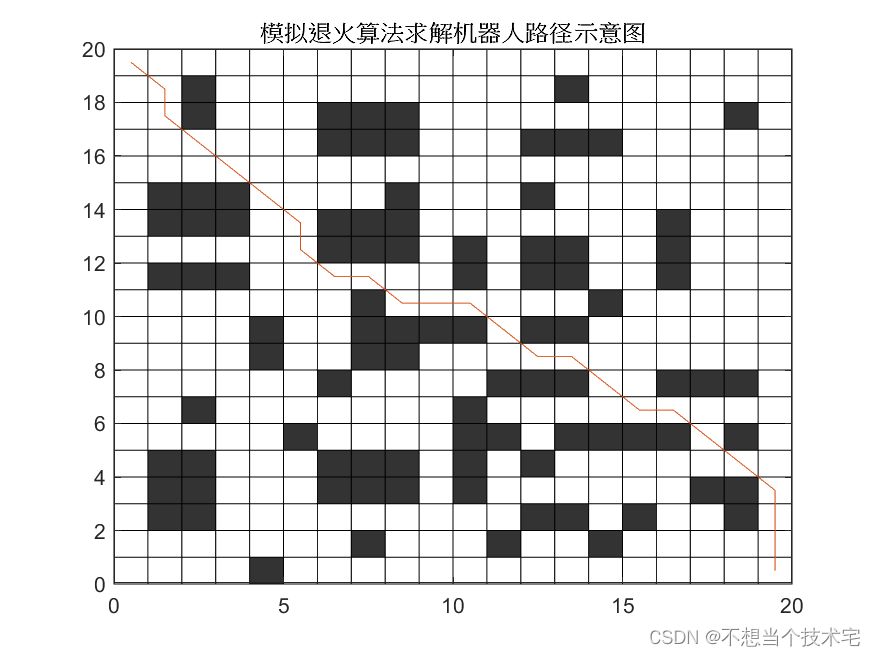
结论:初始解可以直接求取最佳路径
QQ:491052175
VX:Matlab_Lover
仿真结果:
初始解的路径规划图
收敛曲线:
模拟退火算法求解的路径规划图
结论:初始解可以直接求取最佳路径

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 643
643





