







视觉方面的研究,但毕业后未能再此领域深耕,故预将研究阶段所做的工业视觉程序进行分享,作为兴趣爱好愿与有识之人一起交流。
有需要的请留言,以下介绍均有源码
0cHM6Ly9ibG9nLmNzZG4ubmV0L01CU0VwZWVr,size_16,color_FFFFFF,t_70)
一、摄像机标定

(1)标定基元的提取——Harris-Plessey角点检测
优点主要有:计算简单,自动化程度高,提取的点特征均匀而且合理;Harris算子对图像中的每个点都计算其最大值,然后在领域中选择最优点,因此可以定量地提取特征点;在有图像的旋转、灰度的变化、噪声影响和视点的变化,它也是最稳定的一种点特征提取算子,同时给出角点处曲率及角点方向等信息。

a.原始图像
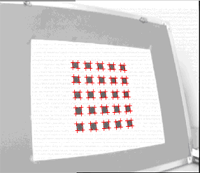
b.检测的角点
(2)摄像机标定

1)基于针孔模型下的摄像机标定
a)Roger Tsai的两步法
b)张正友摄像机标定
2)基于隐式模型下的摄像机标定
a)基于图像恢复中几何校正思想多项式变换标定
二者对比试验
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1786
1786











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









