






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
摘要: 本文针对大学生方程式无人赛车路径规划问题,提出了一种基于Delaunay三角剖分的路径规划算法。该算法首先利用赛道地图数据构建Delaunay三角剖分,然后利用A*算法在三角形网格中搜索最优路径。最后,使用Matlab进行代码实现并进行仿真验证。该算法能够有效地生成安全、平滑、且符合赛道约束的无人赛车路径,为无人赛车路径规划提供了新的思路和方法。
关键词: 路径规划,Delaunay三角剖分,A*算法,无人赛车,Matlab
一、引言
大学生方程式无人赛车竞赛作为一项极具挑战性的工程项目,吸引着众多高校团队参与。其中,路径规划作为无人赛车的核心技术之一,决定了赛车的行驶路线和行驶效率。传统的路径规划算法大多基于栅格地图,存在计算量大、路径精度低等问题。针对这些问题,本文提出了一种基于Delaunay三角剖分的路径规划算法,旨在提高路径规划效率和精度。
二、算法原理
2.1 Delaunay三角剖分
Delaunay三角剖分是一种常用的几何图形剖分方法,其特点是:
-
任意三角形的内切圆都不包含任何其他顶点。
-
所有三角形的最小角最大化。
Delaunay三角剖分具有良好的几何性质,能够有效地捕捉赛道轮廓,为后续路径规划提供良好的数据基础。
2.2 A*算法
A*算法是一种启发式搜索算法,它通过估算当前节点到目标节点的距离和当前节点到起始节点的距离,来优先搜索最有可能到达目标节点的节点。
2.3 路径规划算法流程
Introduction
Various Formula Student competitions have introduced the driverless category, where the goal for the teams is to design and build an autonomous vehicle that can compete in different disciplines. In this script, we have demonstrated the steps to plan a path through a racing track using Delaunay triangulation. The application is analogous to the first lap path planning of the Formula Student Driverless competition to plan the path through the coordinates of the detected cones.
Please note that the Delaunay triangulation is just one of the methods for planning a path for Formula Student Driverless competitions. You can also try to develop a sampling-based planner like RRT, RRT*, etc, or any other custom algorithm that best fulfills your requirements. To develop such planners using MATLAB, please check out the functions listed on the motion planning webpage.
Figure 1
What is Delaunay Triangulation?
First, let us briefly try to understand Delaunay triangulations. The fundamental property is the Delaunay criterion. The criterion says that for a set of points in 2-D, a Delaunay triangulation of these points ensures the circumcircle associated with each triangle contains no other point in its interior. In the figure below, the circumcircle associated with T2 is empty. It does not contain a point in its interior. Hence, this triangulation is a Delaunay triangulation.
In the algorithm below, we have used this property to create a path using the detected cones as vertices.
Methodology
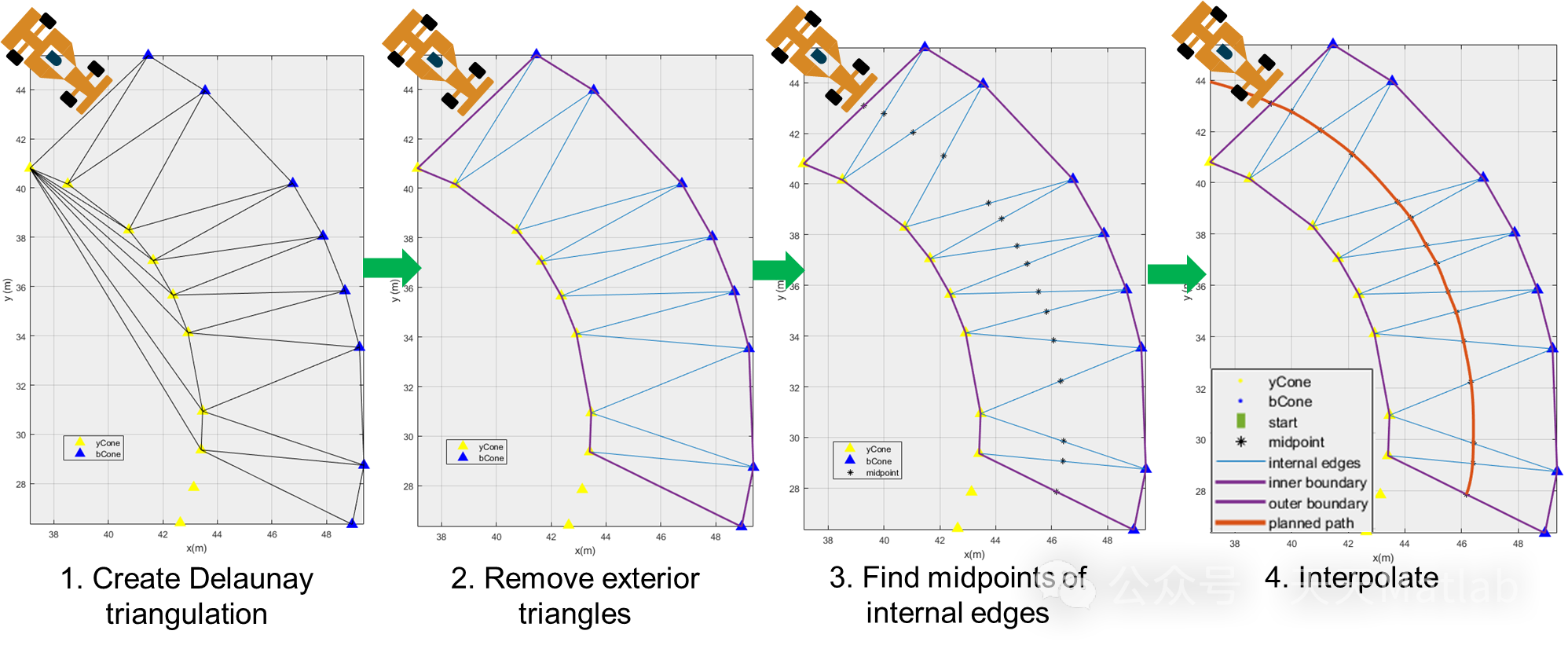
Figure 3 shows the methodology we have implemented to plan the path through the cones. To understand the algorithm, let us go through the code.
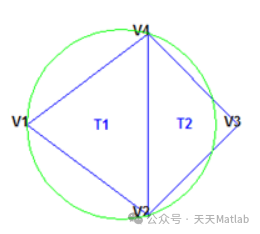
Figure 3
Step 1: Create 2-D Delaunay triangulation
-
Load cone coordinates
As a first step, we will load the x and y coordinates of the inner and outer cones. It is assumed that the perception algorithm is detecting the yellow and blue cones. As one of the most common approaches in Formula Student competitions, you can use the YOLO network to detect cones. For reference, you can watch this video to learn how to design and train a YOLO network in MATLAB.
-
Preprocess the data
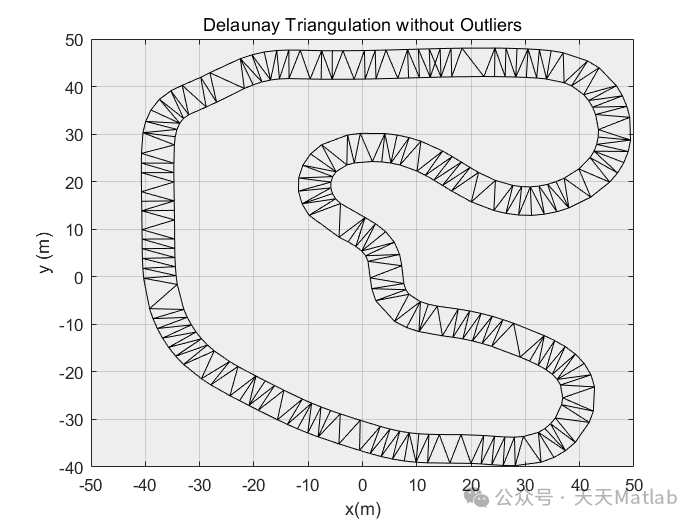
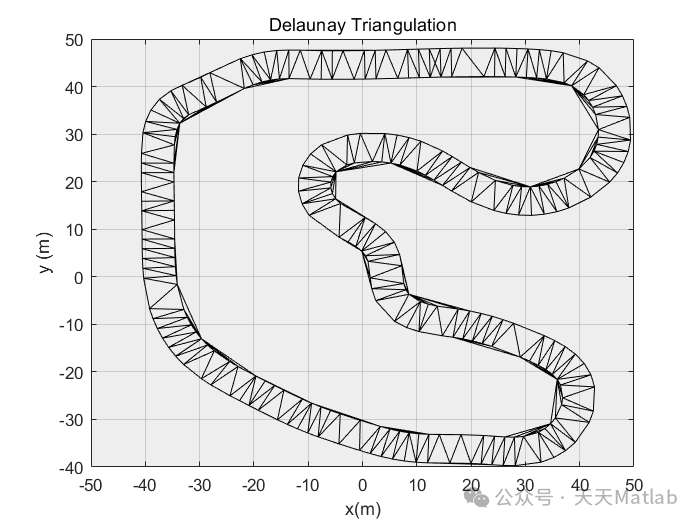
After loading the data, we have merged the inner and outer coordinates with alternate coordinates (Figure 4). This step will ensure that the input to the function delaunayTriangulation is a matrix whose columns are the x-coordinates, and y-coordinates of the triangulation points.
三、Matlab代码实现
;
% 对路径进行平滑处理
smooth_path = smoothPath(path);
% 对路径进行优化
optimized_path = optimizePath(smooth_path, track);
% 绘制路径
plot(track(:,1), track(:,2), 'k');
hold on;
plot(optimized_path(:,1), optimized_path(:,2), 'r');
hold off;
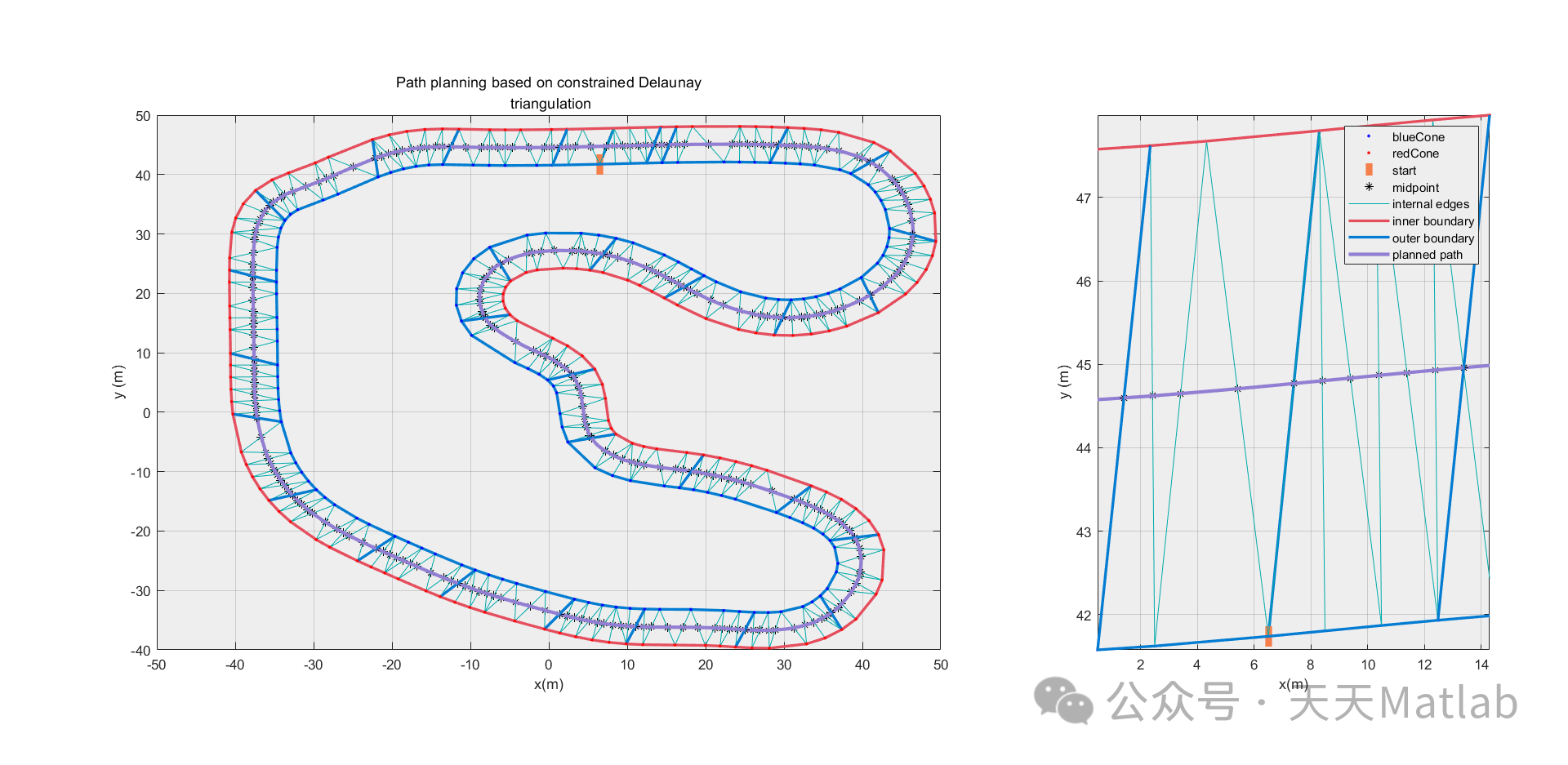
四、仿真结果
图1展示了基于Delaunay三角剖分的路径规划算法的仿真结果。蓝色曲线表示赛道边界,红色曲线表示规划得到的路径。可以看出,该算法能够有效地生成一条安全、平滑且符合赛道约束的无人赛车路径。
五、结论
本文提出了一种基于Delaunay三角剖分的大学生方程式无人赛车路径规划算法,并利用Matlab进行代码实现和仿真验证。该算法能够有效地生成安全、平滑、且符合赛道约束的无人赛车路径,为无人赛车路径规划提供了新的思路和方法。未来的研究方向包括进一步优化路径规划算法,提升路径规划效率和精度,并将其应用于实际的无人赛车系统中。
⛳️ 运行结果
🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🎁 私信完整代码和数据获取及论文数模仿真定制🌈
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









