






【NEAT】(Neural Attention Fields)是近年来在深度学习领域中备受关注的一种新兴技术,通过利用神经注意力机制,有效提升了模型在图像生成、自然语言处理和强化学习等任务中的表现。NEAT技术在计算机视觉、文本生成和自动驾驶等多个领域展示了其潜力和有效性,其创新的方法和卓越的表现使其成为研究热点之一。
为了帮助大家全面掌握NEAT的方法并寻找创新点,本文总结了最近两年【NEAT】相关的8篇最新论文的研究成果,这些论文的文章、来源以及论文的代码都整理好了,希望能为各位的研究工作提供有价值的参考。

三篇论文详述
1、NEAT: Neural Attention Fields for End-to-End Autonomous Driving
这篇文章提出了一种创新的神经网络表示方法——神经注意力场(NEAT),旨在提升自动驾驶模仿学习模型的性能。文章首先指出,自动驾驶系统要实现高效和安全行驶,必须对周围环境的语义、空间和时间结构有深刻的理解。而模仿学习作为自动驾驶领域的一个研究热点,通过行为克隆的方式,利用专家的驾驶轨迹来训练模型预测相应的动作。
然而,现有的模仿学习方法在处理复杂场景时存在局限性。为了解决这些问题,文章提出了将辅助任务整合到训练目标中,以增强模型对场景结构的理解。这些辅助任务包括图像自动编码、2D和BEV语义分割、语义预测等,目的是让模型能够输出场景的BEV语义分割,从而将时空结构融入到学习过程中。
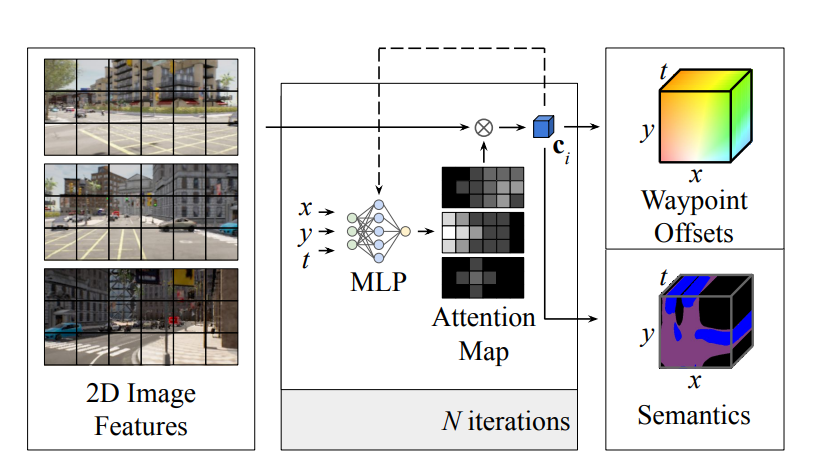
文章指出,尽管这些方法在一定程度上提高了模型的性能和可解释性,但它们通常依赖于昂贵的激光雷达(LiDAR)和高清地图输入,这限制了模型的普及和应用。为了克服这一难题,文章提出了NEAT,这是一种基于MLP的紧凑特征表示方法,能够在固定的记忆占用下,通过注意力机制将高维的2D图像特征压缩成与查询位置相关的低维表示。
NEAT的核心优势在于其能够自适应地关注输入中与驾驶任务相关的区域,同时忽略无关信息。这种机制使得模型能够更加精准地将图像与BEV表示关联起来。文章通过在CARLA驾驶模拟器中的一系列实验,验证了NEAT在具有挑战性的环境和场景下的有效性。在这些实验中,NEAT不仅超越了多个强基线,而且在内部评估路线上与生成训练数据的专家表现相当。
此外,文章还设计了一种新的评估设置,包括不同的城镇、环境条件和复杂的交通场景,以全面测试NEAT的驾驶性能。实验结果表明,NEAT在这些更具挑战性的环境中取得了优异的成绩,并且在CARLA Leaderboard的保密路线上获得了有竞争力的驾驶得分。
文章的贡献不仅在于提出了NEAT这一新的表示方法,还包括了对CARLA评估设置的改进和扩展,以及对模型可解释性的增强。通过可视化NEAT生成的注意力图,研究者能够更深入地理解模型是如何学习驾驶行为的。这些注意力图为研究者提供了洞察模型决策过程的窗口,有助于进一步优化和改进自动驾驶系统。
最后,文章还对NEAT进行了消融研究,探讨了不同组件对模型性能的影响,并展示了模型在不同配置下的表现。这些研究不仅证明了NEAT的有效性,也为未来的自动驾驶研究提供了有价值的参考和指导。通过这些贡献,文章展示了NEAT作为一种强大的工具,能够推动自动驾驶技术的发展,提高其在复杂环境中的安全性和可靠性。
2、Tensorized NeuroEvolution of Augmenting Topologies for GPU Acceleration
这篇文章介绍了一种新的神经网络优化方法,即通过张量化(Tensorized)的神经进化增强拓扑(NeuroEvolution of Augmenting Topologies, NEAT)算法来加速GPU的计算。NEAT算法在神经进化领域得到了广泛认可,以其简单网络开始,逐步进化网络的拓扑结构和权重而著称。尽管NEAT在多个挑战中显示出了有效性,但其计算效率仍是一个限制其扩展潜力的障碍。
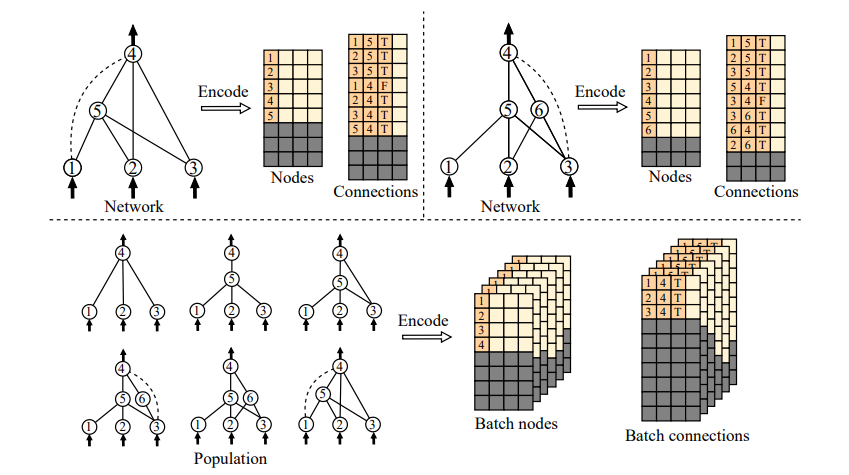
文章提出了一种张量化方法,将NEAT算法中多样化的网络拓扑结构和相关操作转换成统一形状的张量进行计算,这使得算法能够在整个种群上以并行方式执行。基于JAX框架开发的TensorNEAT库实现了张量化的NEAT算法及其变体,如CPPN和HyperNEAT。TensorNEAT通过自动函数向量化和硬件加速,促进了高效并行计算。此外,TensorNEAT库支持包括Gym、Brax和gymnax在内的多种基准环境。通过在Brax中的一系列机器人控制环境中的评估,TensorNEAT与现有的NEAT-Python实现相比,实现了高达500倍的速度提升。
文章首先介绍了神经进化作为人工智能领域一个独特的分支,与通常使用随机梯度下降的机器学习方法不同,神经进化使用进化算法进行网络优化。NEAT算法自2002年推出以来,在游戏AI、机器人学和自动驾驶系统等多个领域都显示出了其有用性。随后,文章详细描述了NEAT算法的核心过程,包括增量拓扑扩展、节点的历史标记以及基于物种的种群分割等独特技术。
文章还讨论了现有的NEAT库,如NEAT-Python、MultiNEAT和MonopolyNEAT,并指出这些实现大多没有利用GPU加速计算,尤其是在网络搜索过程中。为了克服这些限制,作者开发了TensorNEAT,这是一个为GPU加速优化的张量化NEAT库。TensorNEAT采用了新的张量化方法,将不同拓扑的网络转换成统一形状的张量,确保了NEAT算法中的操作可以在整个种群上并行执行。
文章详细介绍了张量化的编码和操作,包括网络编码、节点和连接的修改,以及属性修改。此外,还介绍了张量化网络推理过程,包括前馈和递归网络的转换和计算。
在实验部分,作者比较了TensorNEAT和NEAT-Python在Brax环境中的三个机器人控制任务(Swimmer、Hopper和Halfcheetah)上的性能。实验结果显示,TensorNEAT在执行速度上显著优于NEAT-Python,特别是在计算需求较高、种群规模较大和网络结构较复杂的情况下。
文章最后总结了TensorNEAT在算法执行速度方面对NEAT-Python的显著优势,并展望了TensorNEAT未来的发展方向,包括扩展到分布式计算环境和整合更先进的NEAT变体,以进一步提升解决复杂神经进化挑战的潜力。
3、NEAT: Distilling 3D Wireframes from Neural Attraction Fields
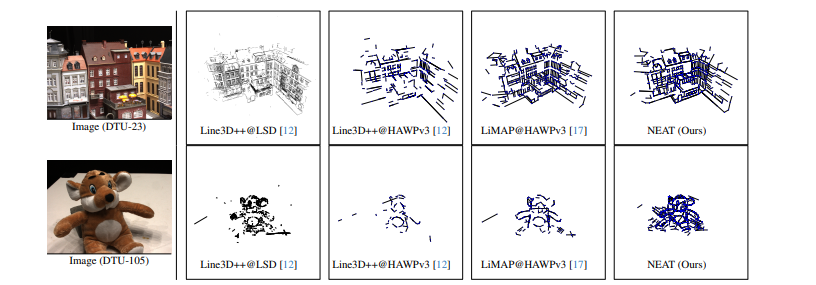
这篇文章提出了一种名为NEAT(NEural Attraction Fields)的新型3D线框重建方法,它通过神经场来表示3D线段,并使用2D观察结果进行渲染和提炼。与传统的基于线匹配的3D线框重建方法不同,NEAT采用了一种无匹配的解决方案,直接从多视角图像中学习并优化3D线框结构。
文章首先介绍了多视图3D重建的研究背景,指出了现有方法依赖于2D线段检测和匹配的局限性,尤其是在处理视角依赖性遮挡时可能出现的不准确匹配问题。为了克服这些挑战,作者提出了一种新颖的渲染-提炼公式,利用神经隐式场表示3D线段,并采用全局3D连接点感知器来识别和提炼稀疏的全局连接点。
NEAT方法的核心在于两个主要的神经组件:一是用于3D线段的神经吸引场,二是全局3D连接点感知器(GJP)。通过联合优化这些组件,NEAT能够从未匹配的2D观察中学习并提炼出3D线框结构。文章详细介绍了NEAT方法的工作原理,包括如何从2D线框检测结果中渲染3D线段,以及如何通过全局连接点感知器来提炼和优化3D线框。
在实验部分,作者在DTU和BlendedMVS数据集上对NEAT进行了评估,与现有的最先进方法进行了比较。结果表明,NEAT在3D线框重建方面具有显著的优势,能够生成更准确且完整的3D线框。此外,NEAT提炼出的3D全局连接点还可以作为3D高斯溅射的更好初始化,用于高保真的新视角合成。
文章还探讨了NEAT方法的一些潜在应用,例如在3D视觉任务中的新视角合成,以及如何将NEAT应用于结构化3D场景表示。作者通过一系列定量和定性的实验验证了NEAT方法的有效性,并讨论了其在不同场景下的适用性和局限性。
最后,文章总结了NEAT方法的主要贡献,并展望了未来的研究方向。作者指出,NEAT是首个使用体积渲染实现多视图3D线框重建的方法,其新颖的连接点感知模块为从2D监督中表征场景几何提供了新的视角。这项工作为3D线框重建领域提供了一种新的解决方案,有望推动相关技术的发展和应用。


















 1501
1501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









