






代码地址:https://github.com/lshiwjx/2s-AGCN

这个图用于说明人体关键节点的定义及其连接方式


这个文件是根据NTURGB-D中关键点的定义计算骨骼长度
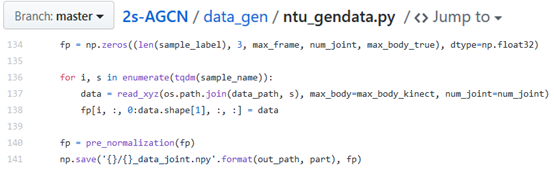
所以最终得到的数据结构
N=sample数量,C=(channel,3固定),T=帧,V=(关节数,固定25),M=(最大人数,固定2)

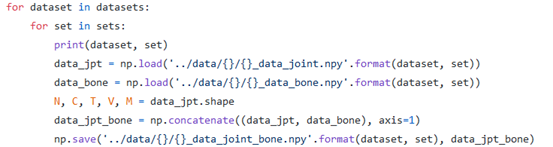
上述文件合并了关节和骨骼信息
下面对2s-AGCN/data_gen/preprocess.py文件注释说明,注释写的有点长,一幕放不下,所以我把代码拆分了,这样滚轮可以在一幕里方便查看,但是代码行号就与原代码对应不上了,见谅
import sys
sys.path.extend(['../'])
from data_gen.rotation import *
from tqdm import tqdm
def pre_normalization(data, zaxis=[0, 1], xaxis=[8, 4]):
N, C, T, V, M = data.shape
s = np.transpose(data, [0, 4, 2, 3, 1]) # N, C, T, V, M to N, M, T, V, C
print('pad the null frames with the previous frames')
for i_s, skeleton in enumerate(tqdm(s)): # 选中一个sample
if skeleton.sum() == 0:
print(i_s, ' has no skeleton')
for i_p, person in enumerate(skeleton):#在sample中选中一个person
if person.sum() == 0:#对当前矩阵所有内容求和
continue
if person[0].sum() == 0:#如果这个person的第0帧对应的所有内容=0
index = (person.sum(-1).sum(-1) != 0)#如果最后一帧的最后一个关节存在,index=1,否则为0
tmp = person[index].copy()#复制这一帧的内容
person *= 0#清空
person[:len(tmp)] = tmp#全部赋值为相同的内容
for i_f, frame in enumerate(person):#选中一帧
if frame.sum() == 0:
if person[i_f:].sum() == 0:#如果当前这个人对应的这个帧之后的内容都为0
rest = len(person) - i_f
num = int(np.ceil(rest / i_f))#使用有意义的数据循环填充
pad = np.concatenate([person[0:i_f] for _ in range(num)], 0)[:rest]
s[i_s, i_p, i_f:] = pad
break
print('sub the center joint #1 (spine joint in ntu and neck joint in kinetics)')
for i_s, skeleton in enumerate(tqdm(s)):
if skeleton.sum() == 0:
continue
main_body_center = skeleton[0][:, 1:2, :].copy()#选取一个sample下的一个person,它的第1个节点定义为main_body_center
for i_p, person in enumerate(skeleton):
if person.sum() == 0:
continue
mask = (person.sum(-1) != 0).reshape(T, V, 1)
s[i_s, i_p] = (s[i_s, i_p] - main_body_center) * mask#减去main_body_center的内容
print('parallel the bone between hip(jpt 0) and spine(jpt 1) of the first person to the z axis')#将第一个人的髋部(jpt 0)与脊柱(jpt 1)之间的骨与z轴平行
for i_s, skeleton in enumerate(tqdm(s)):
if skeleton.sum() == 0:
continue
joint_bottom = skeleton[0, 0, zaxis[0]]
joint_top = skeleton[0, 0, zaxis[1]]
axis = np.cross(joint_top - joint_bottom, [0, 0, 1])
angle = angle_between(joint_top - joint_bottom, [0, 0, 1])
matrix_z = rotation_matrix(axis, angle)
for i_p, person in enumerate(skeleton):
if person.sum() == 0:
continue
for i_f, frame in enumerate(person):
if frame.sum() == 0:
continue
for i_j, joint in enumerate(frame):
s[i_s, i_p, i_f, i_j] = np.dot(matrix_z, joint)
print(
'parallel the bone between right shoulder(jpt 8) and left shoulder(jpt 4) of the first person to the x axis')#将第一个人的右肩(jpt 8)和左肩(jpt 4)之间的骨与x轴平行
for i_s, skeleton in enumerate(tqdm(s)):
if skeleton.sum() == 0:
continue
joint_rshoulder = skeleton[0, 0, xaxis[0]]
joint_lshoulder = skeleton[0, 0, xaxis[1]]
axis = np.cross(joint_rshoulder - joint_lshoulder, [1, 0, 0])
angle = angle_between(joint_rshoulder - joint_lshoulder, [1, 0, 0])
matrix_x = rotation_matrix(axis, angle)
for i_p, person in enumerate(skeleton):
if person.sum() == 0:
continue
for i_f, frame in enumerate(person):
if frame.sum() == 0:
continue
for i_j, joint in enumerate(frame):
s[i_s, i_p, i_f, i_j] = np.dot(matrix_x, joint)
data = np.transpose(s, [0, 4, 2, 3, 1])
return data
if __name__ == '__main__':
data = np.load('../data/ntu/xview/val_data.npy')
pre_normalization(data)
np.save('../data/ntu/xview/data_val_pre.npy', data)















 696
696











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









