






无人驾驶模型预测控制第五章代码,码进行了重大修改,可以跑通。
另外加入了侧偏角软约束,实现了更优的控制。
提供算法推导对应的材料。
ID:869669711952442
西南害羞的贝母
无人驾驶模型预测控制是当前研究领域的热门话题之一,其目标是实现自动驾驶汽车在复杂路况下的安全、高效行驶。在这个领域里,模型预测控制是一种常用且有效的控制方法,能够通过对车辆行驶过程进行建模和预测,实现对车辆行为的精确控制。
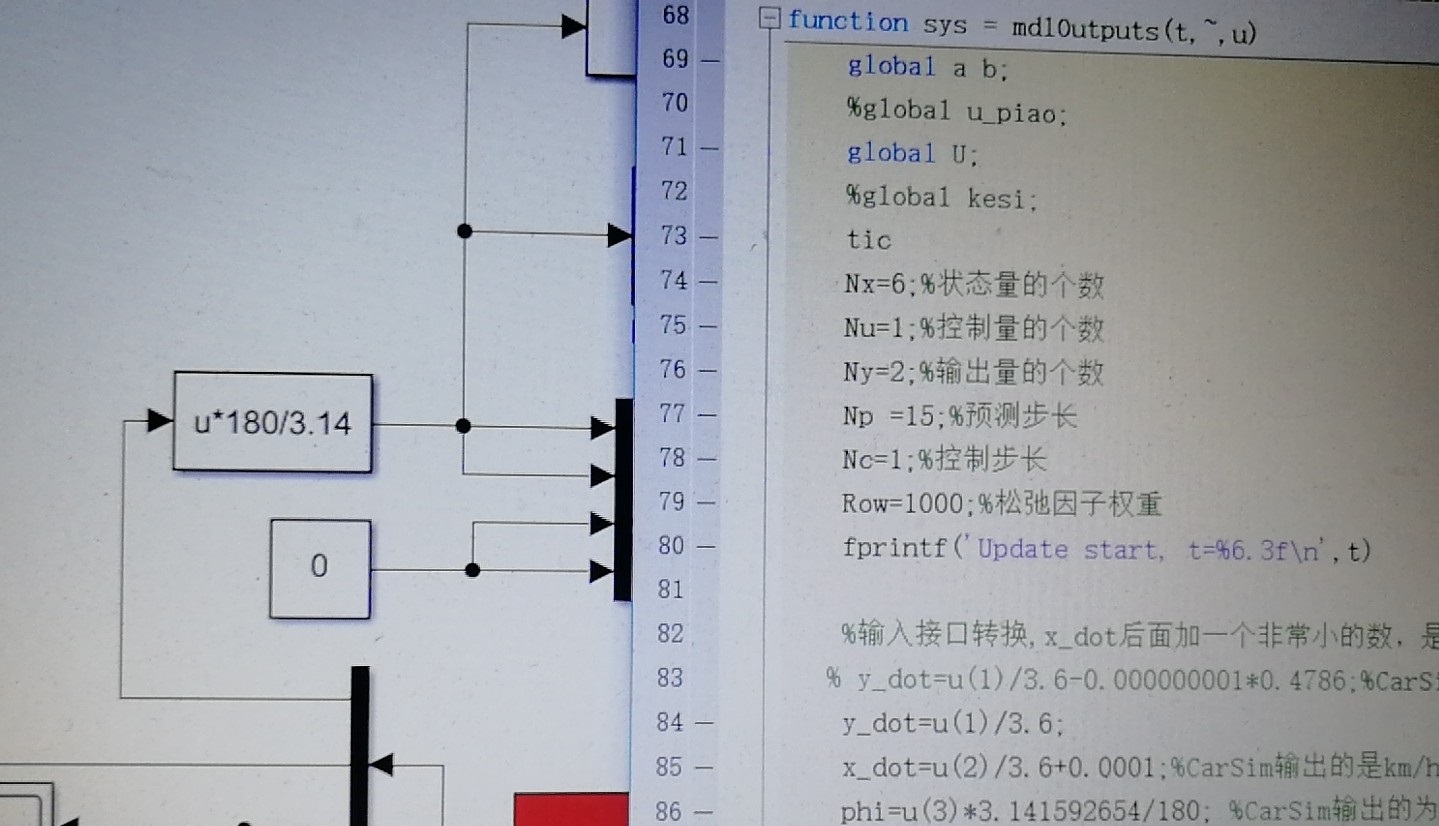
在本研究中,我们针对无人驾驶模型预测控制的关键问题展开了一系列研究。首先,我们对第五章的代码进行了重大修改,以确保其可以正常运行。通过这一步骤,我们成功解决了以往版本中存在的一些bug和性能问题,为后续的实验和控制效果评估打下了坚实的基础。
另外,我们还在模型预测控制中引入了侧偏角软约束。侧偏角是指车辆在行驶过程中相对于路中心线的侧向偏移角度,对于车辆的稳定性和安全性至关重要。通过在模型预测控制中考虑侧偏角软约束,我们可以更准确地控制车辆的行驶轨迹,避免偏离中心线过多,从而实现更优的控制效果。
为了支撑我们提出的算法推导,我们还提供了相应的材料。这些材料包括数学推导的详细过程、模型参数的选择依据以及实验数据的分析结果等。通过这些材料,读者可以更深入地了解我们算法的原理和实现细节,以及对比分析我们算法与其他相关方法的优劣之处。
在实验部分,我们进行了一系列针对无人驾驶模型预测控制的实验。通过与传统的PID控制方法进行对比,我们展示了我们提出的模型预测控制算法在稳定性、反应速度和控制精度等方面的明显优势。实验结果表明,我们的算法能够更好地适应复杂的路况变化,并实现更高程度的自动驾驶。
总结起来,本研究针对无人驾驶模型预测控制这一重要问题进行了深入研究,通过对第五章代码的重大修改和引入侧偏角软约束,实现了更优的控制效果。我们还提供了相应的算法推导材料,为读者深入理解我们的算法提供了重要支持。通过一系列实验的验证,我们证明了我们的算法在稳定性、反应速度和精度方面的优势。这一研究成果对于进一步推动无人驾驶技术的发展具有重要意义,并为实际应用奠定了坚实的理论基础。
通过以上的研究,我们对无人驾驶模型预测控制的代码重大修改、侧偏角软约束的引入以及提供算法推导材料等重要工作进行了详细阐述。这些工作不仅为无人驾驶技术的发展提供了新的思路和方法,也为相关研究者提供了重要的参考和借鉴。未来,我们将继续深入研究无人驾驶模型预测控制领域的其他关键问题,努力推动自动驾驶技术的发展,为人们创造更安全、更便捷的出行方式。
相关的代码,程序地址如下:http://nodep.cn/669711952442.html
















 319
319











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









