




一、理论基础
增大Kp可以降低稳态误差,减少上升时间和调节时间,因此首先选择P校正,在系统中加入一个比例放大器。
此时,系统的开环传递函数变为:
根据单位反馈控制下,闭环传递函数与开环传递函数的关系,可得闭环传递函数
一个开环传递的比例系数,在闭环传递函数中,竟然传到了分母上。
此时系统的稳态误差为
二、Kp仿真
在simulink框图中,加入比例环节。
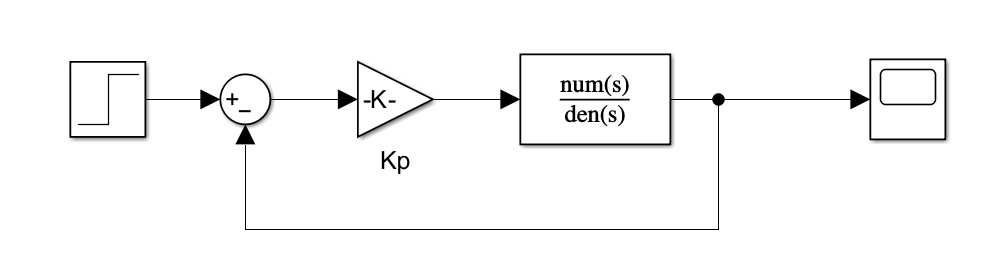
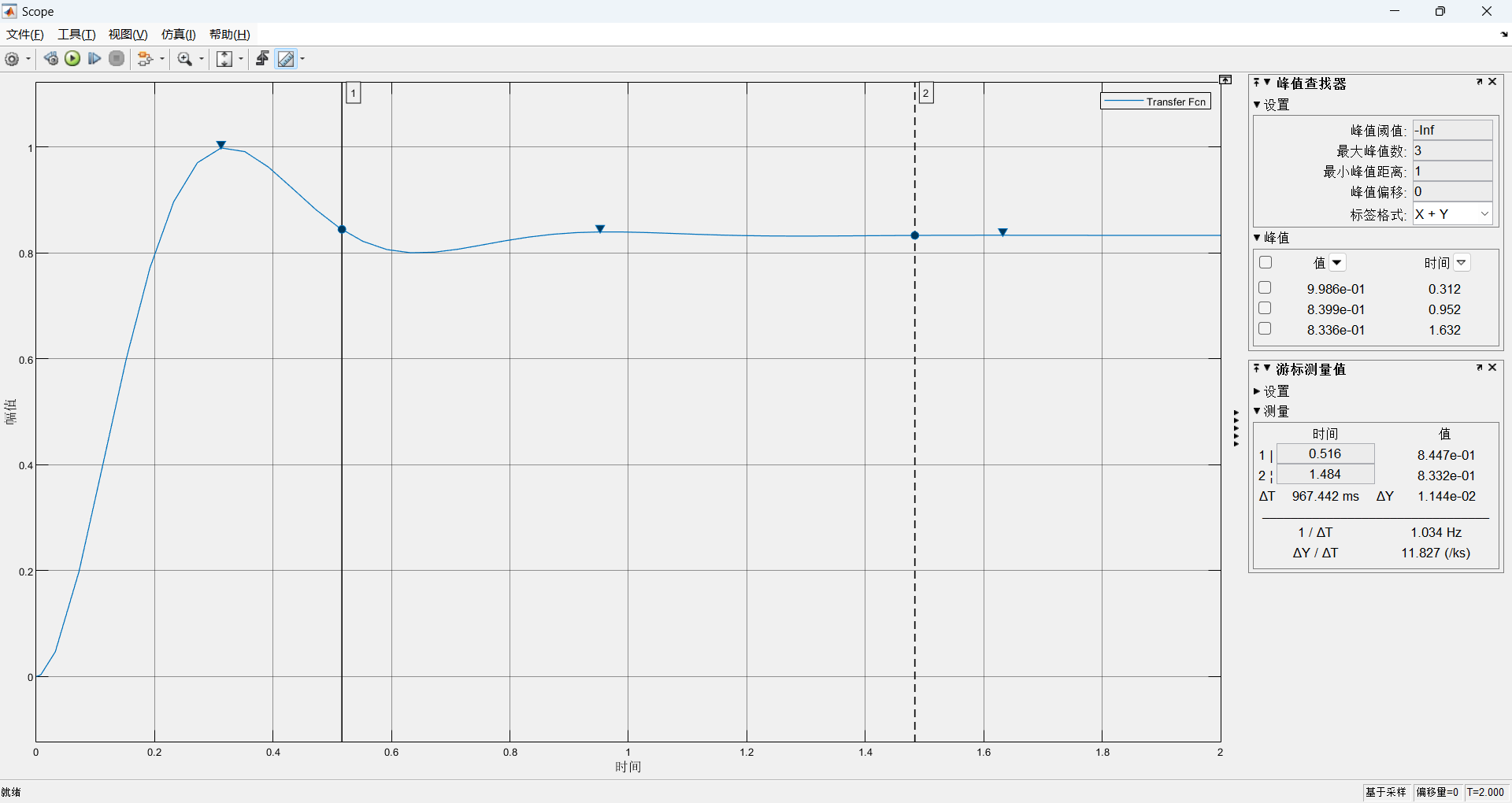
设置不同的Kp,观察示波器的响应。当Kp取100时,稳态值为0.8332,稳态误差为0.1668。
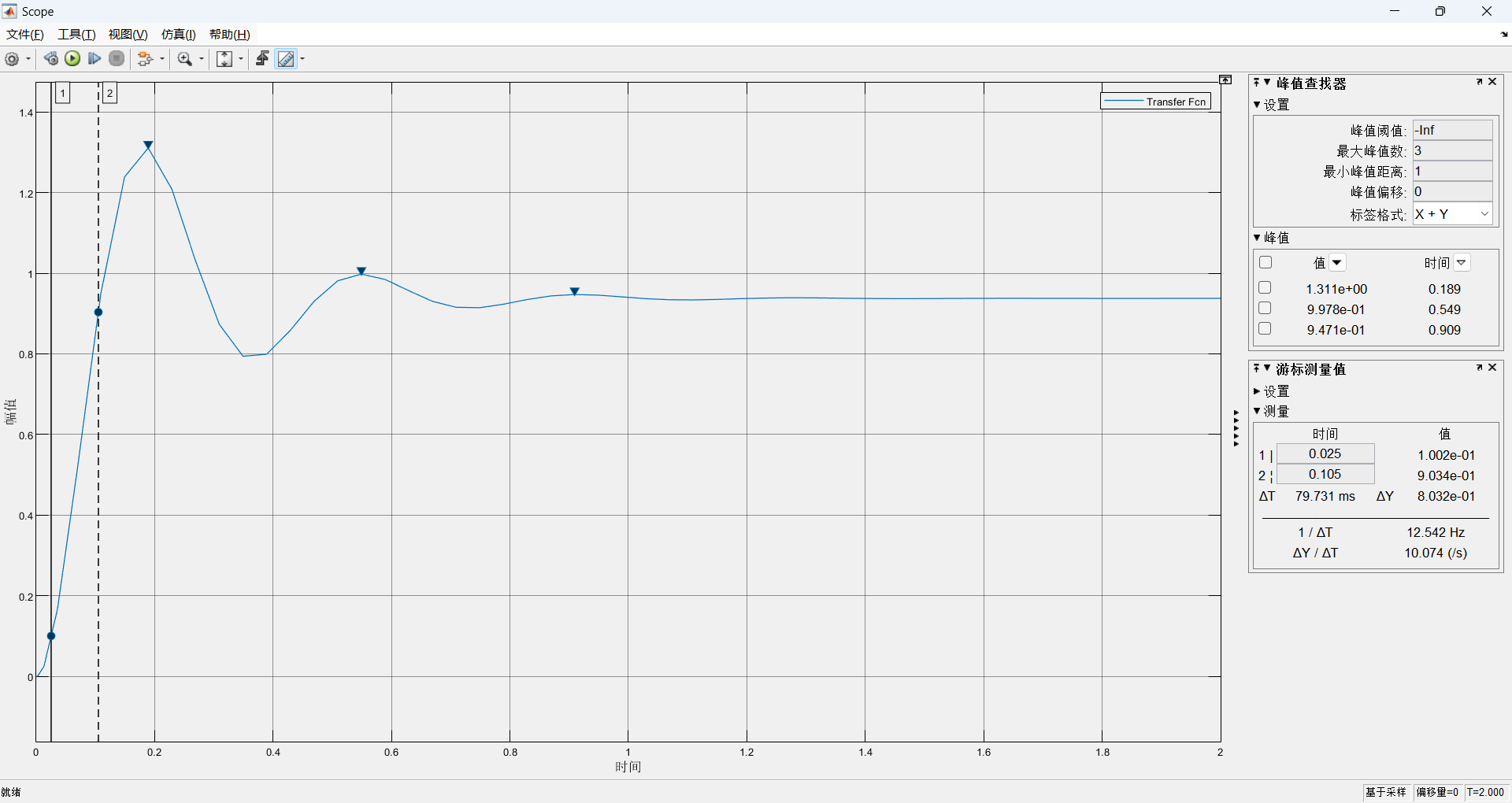
继续增大Kp,取Kp为300时,可以看出系统的稳态值约为0.937,稳态误差0.063,上升时间约为0.07s,调节时间约为0.77s,系统快速性有所改善。但用这个simulink,这几个参数需要手动看,不能自己显示。

















 2271
2271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









