









 本文详细描述了一种基于凌阳16位SPCE061A单片机的悬挂运动控制系统,包括硬件设计、电机驱动、黑线探测、红外无线控制和语音播报等功能,通过实际测试验证了系统的精度和稳定性,适用于解决毕设中的创新挑战。
本文详细描述了一种基于凌阳16位SPCE061A单片机的悬挂运动控制系统,包括硬件设计、电机驱动、黑线探测、红外无线控制和语音播报等功能,通过实际测试验证了系统的精度和稳定性,适用于解决毕设中的创新挑战。
序
🔥 毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是: 悬挂运动控制系统的设计
一、系统的具体设计与实现
1、系统的总体设计方案
如图1所示采用凌阳16位SPCE061A单片机作为运动物体的控制中心,进行数学计算、对光电传感器送来的信号进行处理来控制运动物体的运行方向、计算运行物体的坐标位置、LCD数据显示、键盘控制等。

图 1 系统原理图
2、系统硬件设计与计算
(1)电机驱动电路的设计与实现
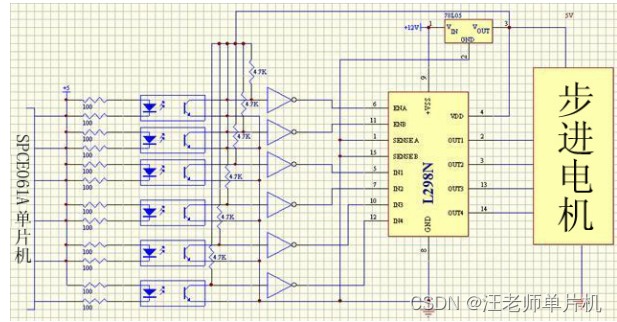
图 2 电机驱动电路
具体电路如图2,该电路采用L298驱动芯片,L298驱动芯片是性能优越的小型直流电机驱动芯片之一。它可被用来驱动两个直流电机或者是一个步进电机。在4——46V的电压下,可以提供2A的驱动电流。L298还有过热自动关断功能,并有反馈电流检测功能,符合电机驱动的需要。
由于采用的是步进电机,所以对电机的驱动必须是采用脉冲控制。
本作品中的控制系统采用5V电源,电机驱动L298的电源也使用5V。基于稳定性考虑,我们运用了TLP521光耦集成块,将主控制部分电源与电机驱动部分的电源隔离开来,这样减少电机对主控制电路的干扰。
(2)黑线探测设计与实现
利用该模块探测板面黑线的原理是:光线照射到板面并反射,由于黑线和白纸的反射系数不同,黑线上方的电阻值发生变化,经过电压比器比较将信号送给单片机处理。电路示意图如图3:
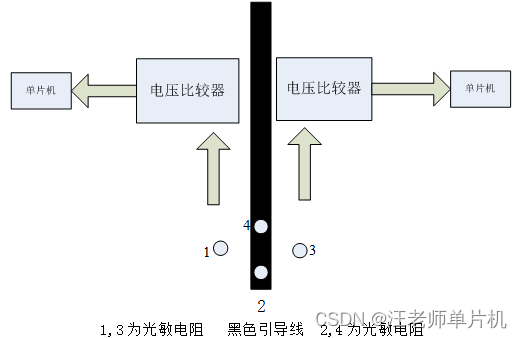
图3 黑线探测示意图
本电路(如图3)利用光敏电阻在不同的光照的条件下电阻变化的原理。根据第几路的光敏检测到黑线来控制步进电机的转向。将光敏电阻分为前、后、左和右四个方向,设计为‘+’字形。 采用一组两个探测头,当出现一个探测头的误判时,可以通过软件禁止物体跑出轨迹。当探测头1检测到黑线时,物体左走,同时禁止物体右转防止跑出黑线,直到中间的探测头2或探测头4再次检测到黑线证明物体已经回到黑线上才向前走,这样就可以保证物体不会跑出黑线。在试验时采用的电路如图4。

图4 黑线探测原理图
由于在正常状态下每个光敏电阻感光量相同,通过调节电位器,使得电压比较器输出为零,当内侧(黑线两侧)的光敏电阻进入黑色引导带时,感光量大大改变,电压比较器翻转电压为高电平。将电平变化送到单片机控制物体的调整方向。用这种方法即使板面受到不同程度的光照射,比较器正向输入端和反向输入端的变化值相等,比较器输出端不变。只有黑色引导线进入内侧一组光敏电阻区域才能引起感光量大大改变,比较器才翻转,这种方法抗干扰能力强。
(3)红外线无线控制台电路的设计
采用红外线无线通信可以对运动物体进行远程控制并传输物体的坐标位置到远处的控制台显示。发射电路如图5示,由NE555构成无稳多谐振荡器,其振荡频率由电阻W1、R1和C3决定,通过调节W1可以改变振荡频率,使输出频率为38KHz。T作为单片机的串口输出端,当T为高电平时,T1截止,T2、T3没有振荡频率。当T为低电平, T1导通,这样38KHz就可以对T出来的信号进行调制;调制后的信号经过T2、T3后级电流放大去控制红外线发射管。
红外线的接收电路直接采用彩色电视机的一体化接收头,达到预期效果。
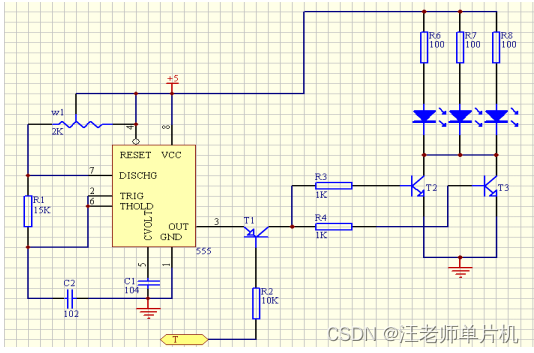
图 5 红外无线控制台原理图
(4)语音播放电路
通过SPY0030功率放大器,驱动喇叭,完成对物体运行时间的语音播放(图6)
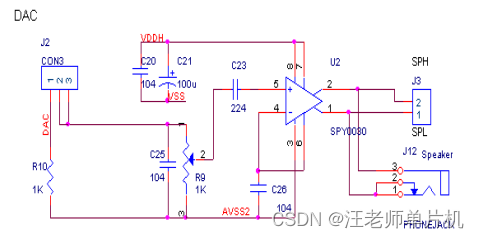
图 6 语音播放电路
(5)显示模块
采用汉字液晶显示屏作为显示模块,同时使用4*4键盘操作,以菜单形式进行显示。显示设定位置值、当前位置值。
2、实际测试
(1)测试设备
模拟行使路线:示意图见试题(E题)
卷尺:精度0.01m
秒表:精度0.01s
坐标纸采用喷塑坐标纸(调试中易于擦洗无用的画笔轨迹)
(2)走自行运动实际测量结果
第一次走实际测量结果:到达目的坐标,运动轨迹与预期轨迹之间的最大偏差1.7cm,运行时间为124秒。
第二次走实际测量结果:离达目的坐标1.3 cm,运动轨迹与预期轨迹之间的最大偏差1.4cm,运行时间为131秒。
第三次走实际测量结果:离达目的坐标1.1 cm,运动轨迹与预期轨迹之间的最大偏差1.3cm,运行时间为147秒。
第四次走实际测量结果:离达目的坐标1.5 cm,运动轨迹与预期轨迹之间的最大偏差1.1cm,运行时间为118秒。
第五次走实际测量结果:离达目的坐标0.8 cm,运动轨迹与预期轨迹之间的最大偏差1.3cm,运行时间为138秒。
第六次走实际测量结果:离达目的坐标1.4 cm,运动轨迹与预期轨迹之间的最大偏差1.9cm,运行时间为128秒。
六次运行物体离达目的坐标最大误差为1.5 cm,运动轨迹与预期轨迹之间的最大偏差1.9cm。平均运行时间约为130秒。达到了预期的效果。
(3)画圆实际测量结果
画圆测试结果如下表
第一次画圆以(40,50)为圆心,对圆周进行8个点采样
| 圆上的坐标 | 物体实际坐标 |
| (15,50) | (17,50) |
| (22,68) | (23.8,69.7) |
| (40,75) | (40,74) |
| (58,68) | (56.5,66) |
| (65,50) | (64,50.4) |
| (58,32) | (59.3,31) |
| (40,25) | (40,24.2) |
| (22,32) | (23.4,32.7) |
最大误差为1.8cm,运行时间为225秒,画笔曲线接近圆。
第二次画圆以(40,50)为圆心,对圆周进行8个点采样
| 圆上的坐标 | 物体实际坐标 |
| (15,50) | (15.5,50.6) |
| (22,68) | (21.9,69.4) |
| (40,75) | (40.5,74) |
| (58,68) | (58.3,66.7) |
| (65,50) | (64.8,50.2) |
| (58,32) | (59.1,34..2) |
| (40,25) | (40.6,24.5) |
| (22,32) | (23.5,32.4) |
最大误差为2.2cm,运行时间为224秒画,画笔曲线接近圆。
第三次画圆以(40,50)为圆心,对圆周进行8个点采样
| 圆上的坐标 | 物体实际坐标 |
| (15,50) | (15,50.6) |
| (22,68) | (22.2,69.4) |
| (40,75) | (38.5,74.1) |
| (58,68) | (56.6,66.7) |
| (65,50) | (65.8,51.7) |
| (58,32) | (59.3,31.1) |
| (40,25) | (39.6,24.5) |
| (22,32) | (22.5,32.7) |
最大误差为1.7cm,运行时间为221秒,画笔曲线接近圆。
三次画圆,运动轨迹与预期轨迹之间的最大偏差2.2cm,平均运行时间约为224秒,达到了预期的效果。
(4)走黑线实际测量结果
第一次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差1.8cm,连续线段运行时间为95秒。
第二次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差2.3cm,连续线段运行时间为98秒。
第三次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差1.6cm,连续线段运行时间为101秒。
第四次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差0.9cm,连续线段运行时间为94秒。
第五次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差2.2cm。走过第一个断点,走断续线段运动轨迹与预期轨迹之间的偏差2.5cm,连续线段运行时间为95秒,第一个间断线段运行时间为45秒。
第六次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差1.5cm。走过第一个断点,走断续线段运动轨迹与预期轨迹之间的偏差2.1cm,连续线段运行时间为97秒,第一个间断线段运行时间为54秒。
第七次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差1.4cm。走过第二个断点,走断续线段运动轨迹与预期轨迹之间的偏差1.5cm,连续线段运行时间为92秒,两个间断线段运行时间共为96秒。
第八次走黑线走完连续线段,运动轨迹与预期轨迹之间的偏差1.2cm。走过第二个断点,走断续线段运动轨迹与预期轨迹之间的偏差1.9cm,连续线段运行时间为96秒,两个间断线段运行时间共为102秒。
八次运行物体运动轨迹与预期轨迹之间的最大偏差2.5cm,连续线段平均运行时间约为95秒,间断线段平均运行时间约为98秒,达到了预期的效果。
(5)其他附加功能
1、语音播报功能
用秒表计时结果与单片机语音播报物体运行时间相符。
2、红外无线控制控制台
红外无线控制控制台硬件已经完成,但是由于时间问题,红外无线控制台的软件没有加到主体程序里,没有进行该项测试。
4、结论
本作品采用凌阳16位单片机SPCE061A作为运动物体的控制中心,SPCE061A具有比51单片机更多、更强的功能。使用SPCE061A单片机的语音功能给本作品带来了很多趣味。采用主控制电路电源与电机电源光电隔离,减少电机对主控制电路的干扰。采用多边形逼近法画圆和优化算法进行自动控制,实现了准确的定位。

如果学弟学妹们在毕设方面有任何问题,随时可以私信我咨询哦,有问必答!学长专注于单片机相关的知识,可以解决单片机设计、嵌入式系统、编程和硬件等方面的难题。
愿毕业生有力,陪迷茫着前行!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









